新型血管介入机器人应用可行性初探
2018-07-30陆清声陈燕青谢永富孙羽东王坤东景在平
陈 政, 沈 毓, 陆清声, 陈燕青, 张 昊, 谢永富, 孙羽东, 陈 冰,王坤东, 景在平
临床上血管疾病介入治疗已逐渐取代开放手术,而随着介入操作量增多,相关问题逐渐暴露,如术者长期X线暴露及负重风险、操作精准性不够、相关经验缺乏所致血管副损伤等[1-2]。血管介入辅助操作机器人系统研究开发可为术者与患者提供更好的治疗操作,目前已成为国内外研究热点[3]。目前机器人系统在心脑血管疾病方面应用较广,但在周围血管疾病的应用有限;在提供更好导航定位和操作稳定性的同时,受到多方面限制,如器具应用需专门设计、不能同时操控导管导丝、不能完成医用植入物释放过程等,既降低了操作等级,又使医疗费用高昂,反超传统开放手术[4-5]。为此,本中心与多方合作共同研究开发出一款新型机器人辅助血管腔内介入系统,通过体外模型实验及动物体内实验证明该系统能够完成复杂血管介入操作,同时完成自膨式支架定位和释放操作。现报道如下。
1 材料与方法
1.1 实验材料与机器人系统
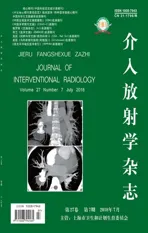
体外实验采用石英玻璃血管模型(连云港市东海创凯石英制品公司),用于模拟正常主动脉、肠系膜上动脉及双髂动脉(具体模型参数见图1)。体内实验动物取成年雌性家猪(第二军医大学提供)1头,体重约58 kg。本实验经第二军医大学伦理委员会批准,在第二军医大学外科中心完成。实验前给予动物人道关怀,术时应用2.5%硫喷妥钠加2.5%戊巴比妥钠混合麻醉,术后予处死。机器人系统为主从复合式结构,由操作控制台和4只机械手构成,操作控制台放置在手术室外。术者通过操作控制台进行手术操作,具有隔离手部颤抖、精细动作放大等技术特征。机械手采用抓手夹持方式,相对于摩擦轮挤压方式对血管腔内器具的保护作用明显改善。操作控制上,采用12自由度多机械手协同技术方案,能够完成线性运动和旋转动作(图2)。
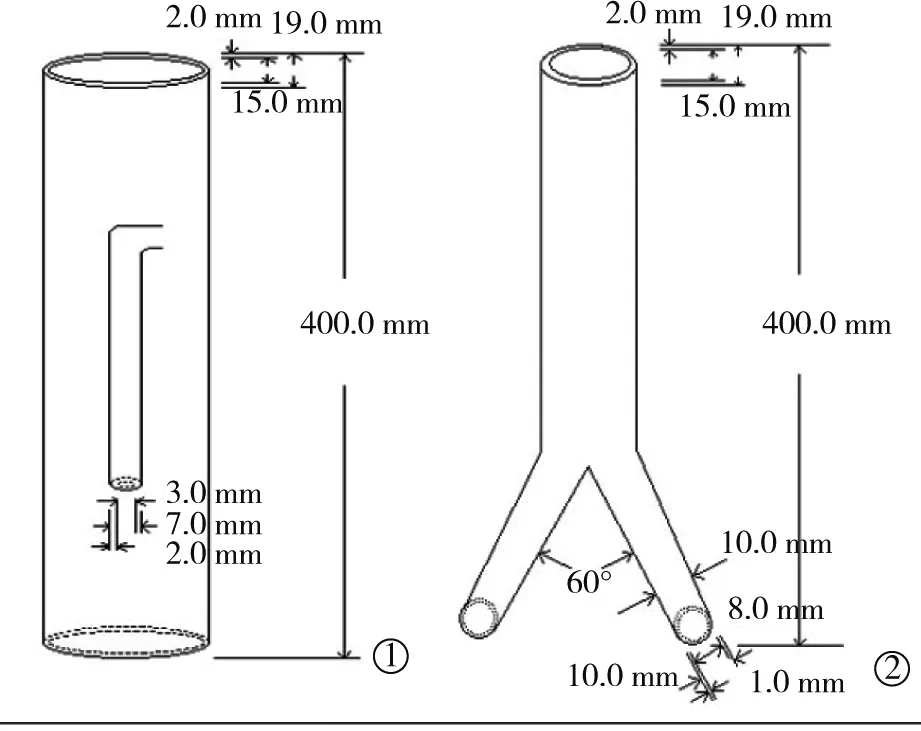
图1 石英玻璃血管模型示意图
1.2 体外实验方法
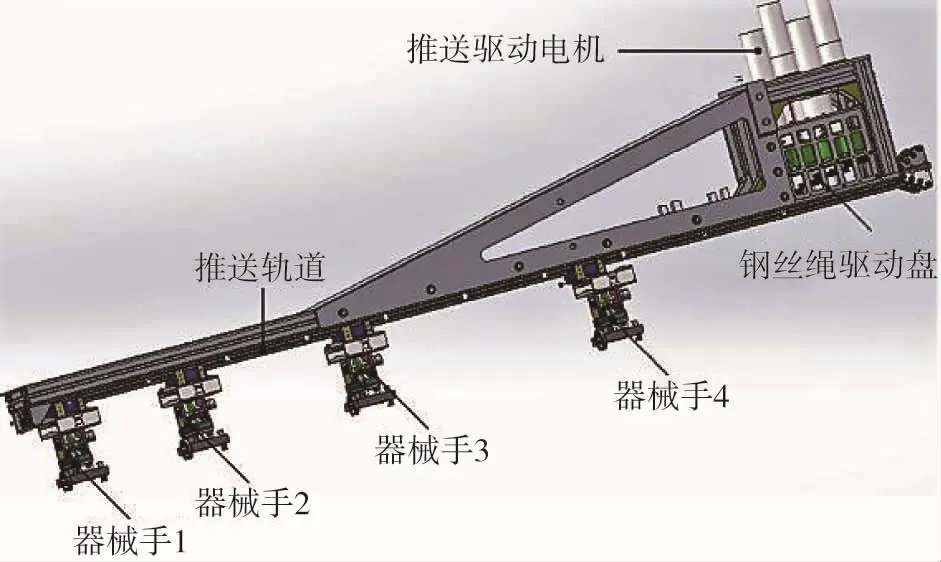
图2 机器人辅助血管腔内介入系统机械手
模拟髂动脉支架植入术——选用8 F短鞘,人工置入石英玻璃血管模型右侧股浅动脉,胶布将短鞘固定于操作台;依次引入0.035英寸泥鳅导丝、翻山鞘及Flush导管,导丝导管穿过机械手操作孔,翻山鞘末端固定于第1、2机械手之间,Flush导管末端固定于第2、3机械臂手之间;用机械手1夹持翻山鞘,机械手2夹持Flush导管,机械手3夹持导丝并从机械手4中穿出;用操纵杆控制机械手3将导丝推送至腹主动脉下段后夹持固定,机械手2推送Flush导管至髂动脉分叉水平;通过旋转导丝、导管将导丝选入左侧髂总动脉,固定导丝,依次跟进Flush导管及翻山鞘后夹持固定;夹持翻山鞘及导丝,控制机械手2,撤出Flush导管,手动交换预先在40℃温水浸泡过的10 mm×400 mm OptiMed裸支架,将输送鞘末端固定于机械手2、3之间,用机械手2逐段推送输送装置至预定区域,机械手3夹持释放装置末端,机械手2夹持释放装置并回撤释放支架,见支架在预定区域展开,支架展开效果满意;手动依次回撤输送装置、翻山鞘及导丝,术毕。
模拟肠系膜上动脉支架植入术——选用8 F短鞘,人工置入石英血管模型右侧股浅动脉,胶布将短鞘固定于操作台;依次引入0.035英寸泥鳅导丝、肾动脉鞘及SOS导管,导丝导管穿过机械壁操作区,长鞘末端固定于第1、2机械手之间;SOS导管末端固定于第2、3机械手之间;用机械手1夹持肾动脉鞘,机械手2夹持SOS导管,机械手3夹持导丝并从机械手4中穿出;用操纵杆控制机械手3将导丝推送至肠系膜上动脉开口水平后夹持固定,机械手2推送SOS导管至肠系膜上动脉开口附近后固定导管;机械手1控制并跟进长鞘,通过旋转机械手2、3及推送机械手3将导丝选入肠系膜上动脉,固定导丝、跟进SOS导管及长鞘后夹持固定;控制机械手2,撤出SOS导管,手动交换预先在40℃温水浸泡过的5 mm×80 mm MicroPort裸支架,将输送鞘末端固定于机械手2、3之间,用机械手2逐段推送输送装置至预定区域,机械手3夹持释放装置末端,机械手2夹持释放装置并回撤释放支架,见支架在预定区域展开,视为操作效果满意;手动依次回撤输送装置、肾动脉鞘及导丝,术毕。
1.3 体内实验方法
实验猪麻醉后气管插管,常规消毒铺巾,采用Seldinger技术穿刺右侧股动脉并置入内径8 F短鞘(日本Terumo公司),引入0.035英寸导丝(日本Terumo公司)及外径5 F单弯导管(美国Cordis公司),将导丝、导管末端从机械手抓手夹持孔穿出;机械手1夹持外鞘,机械手2、3分别操控导管和导丝;机械手2、3配合将导丝选送至腹主动脉下段后跟进导管;撤导丝,手动造影并测量靶血管直径;再次引入0.035英寸导丝,撤单弯导管,沿导丝自短鞘内置入内径6 F Balkin长鞘(美国Cook公司)并由机械手1夹持;引入外径5 F Omni Flush导管(美国AngioDynamics公司),穿过夹持孔并由机械手2夹持导管前端并将导管送至腹主动脉分叉处后用路径图功能,通过机械手2、3配合将导丝选送至对侧髂内动脉;机械手3固定导丝,沿导丝跟进导管,继而由机械手1跟进外鞘并夹持固定;交换0.018英寸V-18导丝(美国Boston科技公司),通过机械手2、3配合退出导管,引入8 mm×60 mm Crownus自膨式裸支架(上海微创心脉医疗科技公司)1枚;机械手4夹持并固定导丝末端,机械手2将支架移植物输送至目标位置,由机械手3夹持并固定输送系统末端以提供支撑,机械手2夹持输送系统前端并后撤以释放支架,完成对侧髂内动脉支架植入;保留导丝、撤出输送系统及长鞘;沿导丝自短鞘引入8 mm×60 mm Crownus自膨式裸支架1枚,机械手4夹持固定导丝,由机械手2将输送系统头端推进至同侧髂总动脉,通过机械手2、3配合完成支架释放;撤出输送系统,再次手动造影评估支架释放效果及可能存在的手术相关并发症,术毕。
2 结果
体外实验显示,采用新型机器人辅助血管腔内介入系统成功地于石英玻璃血管模型模拟的髂动脉及肠系膜上动脉中分别植入OptiMed裸支架1枚及MicroPort裸支架1枚,支架在40℃水浴加热下膨胀释放良好(图3);整个系统完善可靠。
体内实验显示,双侧髂动脉支架成形术在新型机器人辅助下顺利完成,手动造影显示支架定位准确,无明显移位(图4);手术总耗时50 min,机器人操作耗时38 min;除穿刺、置鞘及更换导丝、导管外,其余操作如超选、翻山及支架释放等均由机器人完成;未出现夹层、穿孔等手术相关并发症。

图3 石英玻璃模型中模拟支架植入术
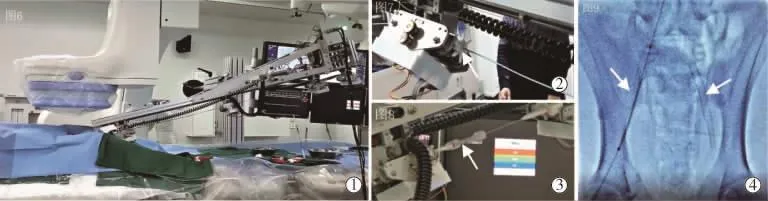
图4 体内实验过程
3 讨论
机器人辅助导航及血管介入系统相比传统介入手术有着独特优势,在提供更好操作稳定性和精准度的同时,通过远程操控介入手术过程可有效地减少X线辐射,避免长时间负重,从而降低职业相关疾病发生率[4]。目前成型的机器人辅助导航及血管介入系统均存在设计缺陷,大多需要特殊血管介入器具,花费较高,且能完成的介入操作有限,不能同时操控多个器具、完成支架置放等复杂操作。例如Magellan系统需要配套的可操控导管进行导航和定位操作[6];Amigo系统为一开放操作平台,没有庞大的操作台面,仅用一操控手柄在远处对导管导丝等器具进行操控,操作能力有限[7];CorPath系统通过无菌操控盒装载血管介入器具,可完成对导丝导管同时操控,但仅限于快速交换球囊导管等器具,不能通过导丝作器具交换,且一次性操作盒费用较高[8]。国内还未出现成型的血管介入机器人系统,均处于实验阶段,操作能力有限[9-11]。
本中心研究开发的机器人辅助血管介入系统采用开放式结构设计,能够配合通用导丝、导管、球囊及外周支架系统进行操作。机械手夹持采用抓手式设计,区别于以往报道的摩擦轮设计;结构改进后的4只机械手以单轴输送,可单独完成夹持、前进、后退及旋转运动。单个机械手最大夹持力达13.89 N,单次周向旋转角度达61.2°,在达到支架释放过程中稳定性和精确性要求的同时,通过单手重复动作能使器具在血管腔内旋转。上述设计和改进使新型血管腔内介入机器人实现了多机械手协同操作功能,可模拟人手动作,完成术中超选、翻山、支架释放等复杂操作;通过预先设定程序,可自动化控制多只机械手协同完成腔内器具前进、后撤和旋转运动,实现人机交互,提高了操作安全性和时效性;整个系统部件可拆卸、组装,解决了空间占用率问题,同时方便运输与移动。
然而该系统仍存在相关限制:①实际介入操作过程中,术者须通过导丝导管扭控力调节和感知、控制整个手术操作[12]。多家研究团队予以安装微型力感应器或应用电磁感应技术进行力反馈,但这些技术应用仅限于导管尖端,不能反映器具与血管壁之间力的作用,拟在进一步研究中将相关反馈机制加载于操作手柄,使术者对手术操作具有直观感受;本中心拟将多器具自动装载功能融合进系统,实现针对复杂血管病变的多器具应用。②临床上针对腹主动脉瘤、累及左锁骨下动脉的主动脉夹层通常需建立多条血管通路,但目前系统结构为单轴式设计。本中心将进一步探索并加以改进。
本实验证明,本中心研究开发的机器人辅助血管腔内介入系统能在远程操控下完成支架植入释放操作。整个操作过程安全有效,术中及术后均未出现系统操作所导致的血管相关并发症。目前该系统仍缺乏力反馈相关技术,实现力反馈并完善多器具自动装载功能可大大提高整个机器人系统的安全性和操作效率。进一步改进相关不足之处并开展临床应用研究,是下一阶段研究重点。