模 糊 控 制 红 外 循 迹 小 车 的 研 究
2018-07-27陈国壮候云雷
张 萍, 陈国壮, 候云雷, 李 东
(江阴职业技术学院 电子信息工程系,江苏 江阴 214400)
0 引 言
智能小车是集环境感知、路径决策与自动行驶等多功能于一体的轮式移动机器人[1],在仓库货物搬运、小区巡逻、险情排除等领域得到了广泛应用[2]。循迹是智能小车移动过程中经常需要解决的问题,目前关于循迹小车的研究很多,其中大多数研究是从电动机驱动原理[3]、循迹算法的实现等方面进行分析[4]。本文重点解决循迹小车红外对管的抗干扰问题、弯道循迹时小车易冲出弯道和弯道循迹抖动等问题,并提出小车车速的模糊控制方案,从而实现小车快速、流畅循迹。
1 循迹原理和抗干扰设计
1.1 循迹原理[5-7]
小车循迹是通过循迹传感器对白色地面上的黑色跑道或者黑色地面上的白色跑道进行检测来实现的,循迹传感器一般采用红外对管,其检测信号调理电路如图1所示。
本系统是在白色地面上铺设黑色跑道,循迹传感器通过对黑色跑道进行检测实现循迹。当红外对管检测到白色地面时,地面将发光管发出的光反射给接收管,接收管饱和导通,比较器LM339同相输入端输入低电平,输出信号Uout为低电平;当红外对管检测到黑色跑道时,发光管发出的光被黑色跑道吸收,接收管截止,比较器LM339同相输入端输入高电平,输出信号Uout为高电平。电位器R4给比较器LM339反相输入端提供了一个基准电压,通过调节R4可以改变基准电压,从而实现在不同循迹环境下循迹传感器的正常输出。
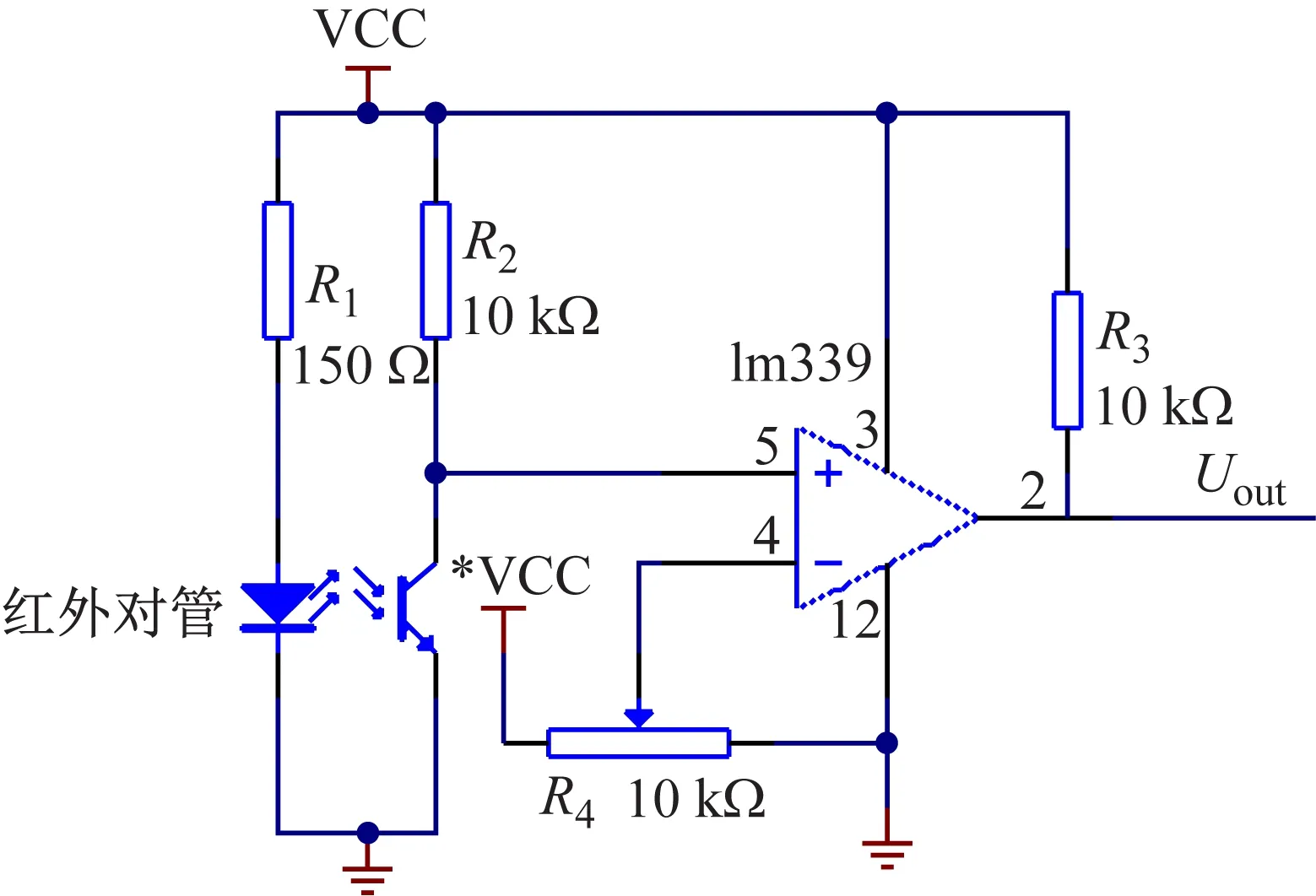
图1 信号调理电路
系统采用4对红外对管实现跑道检测[8],其安装位置如图2所示,左边安装了两对红外对管L1和L2,右边对称安装了两对红外对管R1和R2,中间两个红外对管间距为6 cm,旁边两个红外对管间距为10 cm。左右两边分别使用两对红外对管进行检测,主要原因在于:① 防止车速过快时,小车偏离跑道,传感器来不及检测;② 根据同一边两个不同传感器检测的信号,可以判断小车偏离跑道程度不同,从而可以采取程度不同的调整措施。
图2 循迹传感器安装示意图
如果L2或者R2检测到黑线,表示小车右偏或者左偏,需要左转或者右转微调;如果L1或者R1检测到黑线,表示小车严重右偏或者严重左偏,需要左转或者右转急调。根据4对红外对管检测的信号对小车进行循迹调整方案具体如表1所示。
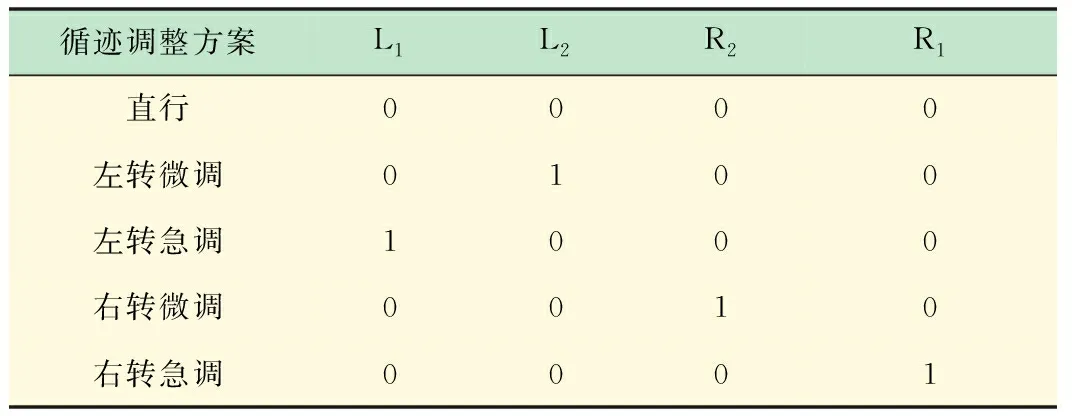
表1 循迹方案表
1.2 红外接收抗干扰处理
采用红外对管进行路径检测很容易受到环境光源的干扰,因此对红外接收进行抗干扰处理显得尤为重要。首先循迹小车工作环境的光线不可太强,小车的调试环境尽量接近小车工作环境,以保证调试成功的小车在工作环境下能够正常循迹。其次,发光管和接收管一般安装得很接近,为了防止发光管发出的光被接收管直接接收,而不是被地面发射回来接收,发光管可采用热缩管套住四周,只露出发光管前端,以保证光束平行照向地面,而不会向四周发散,被接收管误接收。
2 循迹算法分析与设计
小车直线循迹一般比较容易实现,但是对于弯道循迹,尤其是对于半径较小的弯道,小车循迹过程中很容易出现这样两种情况:① 冲出跑道;② 转弯抖动频繁。
2.1 弯道处易冲出跑道的原因分析与解决方案
在调试过程中,发现小车经常在弯道处冲出跑道,经过反复修改程序、调整参数,发现其因为主要存在于两个方面:
(1) 进入弯道时速度过快。在弯道处,当循迹传感器检测到小车偏离了跑道,还没有来得及进行行驶方向调整,由于速度过快,小车便完全脱离了跑道。为了解决这个问题,需要减小驱动直流电动机的PWM占空比,降低小车的行驶速度。
(2) 小车在方向调整的过程中,使用了软件延时。在调试过程中,发现小车的行驶速度已经降得很低,但是在转弯的过程中,小车运行情况并不稳定:有时能够成功转弯,有时会脱离跑道。经过分析与调试,发现其原因主要是由于小车在方向调整过程中,使用了软件延时。方向调整使用软件延时,意味着在延时过程中,循迹传感器检测的路径情况没有传送给CPU进行处理,如果在这个过程中小车方向调整过度,就很容易冲出跑道。
在去掉小车方向调整中的软件延时,并适当降低驱动直流电动机的PWM占空比后,小车就成功实现了弯道循迹。
2.2 弯道循迹抖动原因分析与解决方案
小车在弯道循迹的过程中,常常需要停下来进行方向调整,如果调整次数过于频繁,小车看起来就好像是在“颤抖”。对于这个问题,系统采取了如下解决办法:
经过调试,发现小车在方向调整的过程中,如果方向调整角度越小,小车抖动得越厉害,因此为了减小抖动程度,需要加大方向调整角度。增大方向调整角度的方法有两种:①方向调整时,增加软件延时,让小车在调整方向的运行时间足够;②增大小车方向调整的运行速度,也就是加大弯道时电动机驱动PWM脉冲占空比。对于方法①增大了小车运行的不稳定性,有时会造成小车脱离跑道,因此系统采用方法②增大小车的方向调整角度。
跑道宽度和循迹中间两对管的安装间距与小车转弯行驶的流畅性也密切相关。本系统中,4个循迹传感器都检测到白色地面时,表示小车正好沿着跑道行驶,应该直行。当沿着弯道行驶时,根据循迹传感器检测的信号进行相应的方向调整。如果中间两个循迹传感器的间距与跑道宽度比较接近,在弯道循迹时循迹传感器会非常频繁地检测到跑道,从而造成小车频繁地调整方向,引起小车频繁抖动,因此小车中间两个循迹传感器之间的距离与跑道宽度之间的间距必须合适,如果过大,小车不能及时调整方向;如果过小,小车方向调整会过于频繁,影响小车弯道循迹的流畅性。
3 小车车速的模糊控制算法[9-10]
根据小车循迹算法分析可知,在弯道循迹时,如果车速过快,小车易脱离跑道;如果车速过慢,小车抖动会比较明显,因此合适车速的选取对于弯道循迹非常重要。在小车循迹的过程中,由于弯道的半径是变化的,跑道的宽度不尽相同,小车偏离跑道的程度也在不断变化,因此循迹的过程很难用一个精确的数学模型进行描述,而模糊控制对数学模型依赖较弱,只要根据操作经验建立合适的控制规则,就能够对小车车速进行合理控制,从而完成成功循迹。
3.1 模糊控制器总体结构[11-12]
模糊控制是智能控制方法中的一种,无需预先知道被控对象的精确数学模型,控制规则以人的经验总结表示,对被控对象的参数变化具有较强的鲁棒性。模糊控制包含模糊化处理、模糊推理和清晰化处理三部分,如图3所示。

图3 模糊控制器结构
小车车速模糊控制器采用位置偏差e和位置偏差变化率ec作为输入,提供给电动机驱动模块的PWM占空比pwmdc作为输出。
3.2 基本论域与模糊论域[13]
由图2可知,e的基本论域为[-5 cm, 5 cm],将其量化为7级,对应的模糊变量语言为[NB,NM,NS,ZE,PS,PM,PB]。根据实际经验,ec的基本论域为[-0.5 cm, 0.5 cm],将其量化为3级,对应的模糊变量语言为[N, Z, P]。经过反复实践,得到pwmdc的基本论域为[0.4, 0.8],将其量化为3个等级,对应的模糊语言变量为[V1, V2, V3]。e、ec和pwmdc均采用三角隶属度函数,如图4~6所示。

图4 e的三角隶属函数
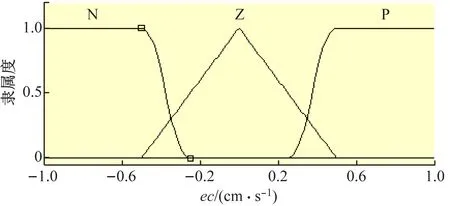
图5 ec的三角隶属函数
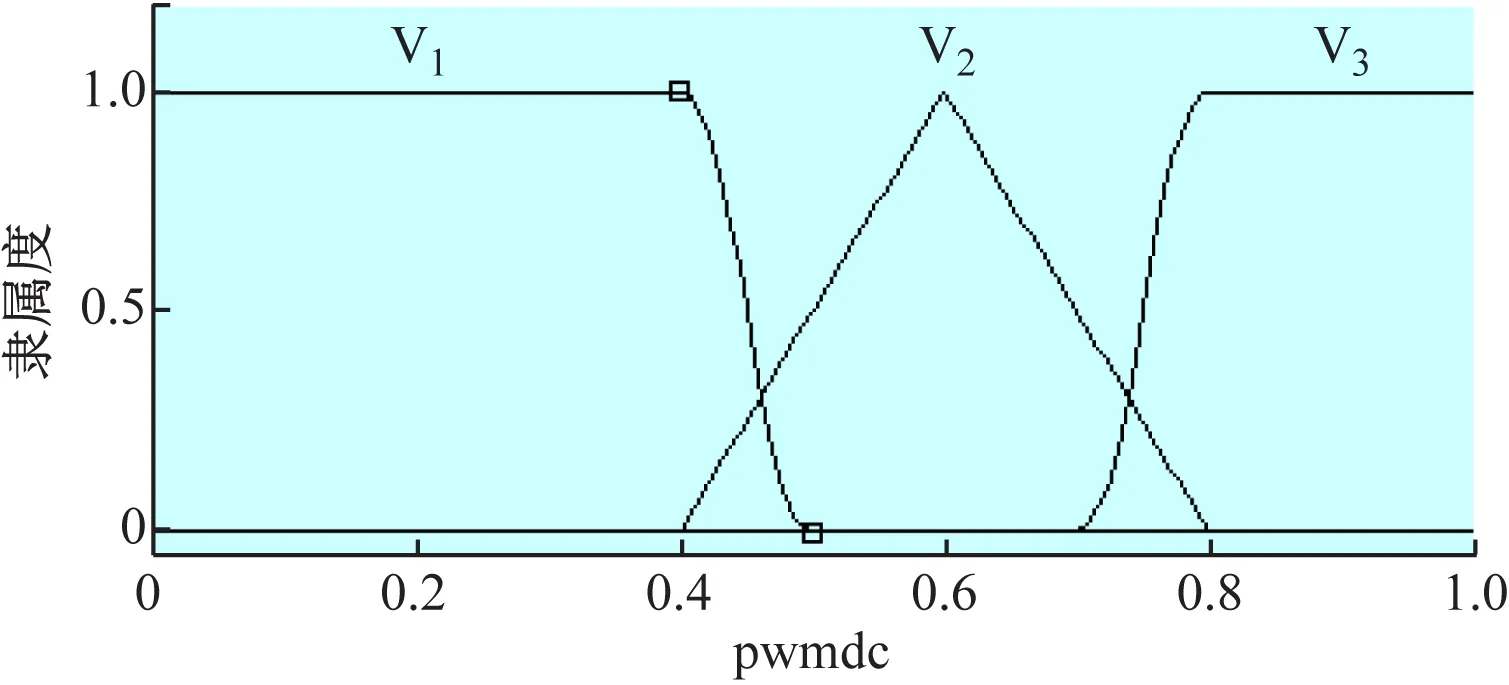
图6 控制变量pwmdc的三角隶属函数
3.3 模糊控制规则
通过对小车反复调试、运行,总结得到小车车速的模糊控制规则为:①直道上车速最快;②弯道上小车减速;③小车略微偏离跑道,传感器L2或者R2检测到黑色路径时车速减小调整方向,防止方向调整过度;④小车严重偏离跑道,传感器L1或者R1检测到黑色路径时适当加速,快速调整方向,防止小车抖动。
显然,上述控制规则遵循的原则是:偏差较大时,模糊控制量的选择以消除偏差为主;偏差较小时,模糊控制器的选择以系统稳定性为主,以防系统超调。根据上述控制规则建立的模糊控制表如表2所示。
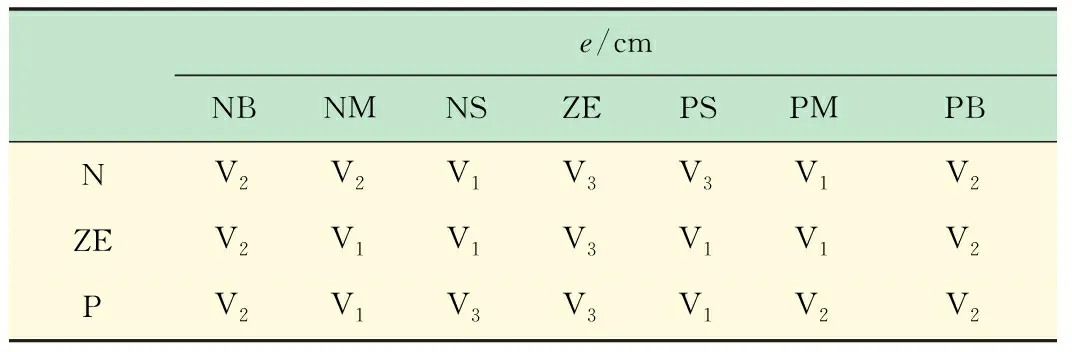
表2 车速模糊控制规则表
Matlab 软件绘制模糊逻辑控制器的输入输出三维曲面如图7所示。
3.4 清晰化处理
通过模糊控制规则得到的结果是一个模糊量,而控制系统输出的控制信号是一个确定的量值,因此,在模糊控制应用中还需要将模糊控制器输出的模糊量进行清晰化处理,以得到一个确定值。常用的清晰化方法有两种:最大隶属度法和重心法。由于最大隶属度法引起的控制偏差较大,而重心法是取模糊隶属度函数曲线与横坐标围成面积的中心为模糊推理输出的精确值,算法比较精确。根据重心法得到的小车速度控制表如表3所示。
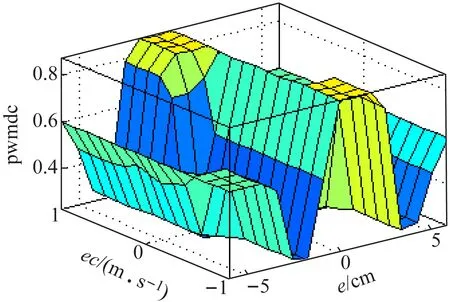
图7 输出pwmdc的三维曲面
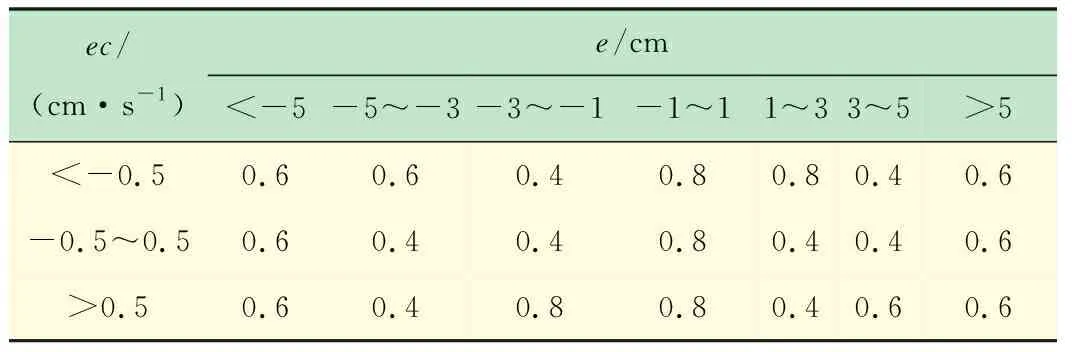
ec/(cm·s-1)e/cm<-5-5~-3-3~-1-1~11~33~5>5<-0.50.60.60.40.80.80.40.6-0.5~0.50.60.40.40.80.40.40.6>0.50.60.40.80.80.40.60.6
3.5 模糊控制器仿真
在确定了系统控制的模糊规则,创建了系统的模糊逻辑后,对整个系统进行了Simulink仿真实验。采用e和ec作为仿真输入,pwmdc作为仿真输出,建立的模糊控制仿真模型如图8所示。
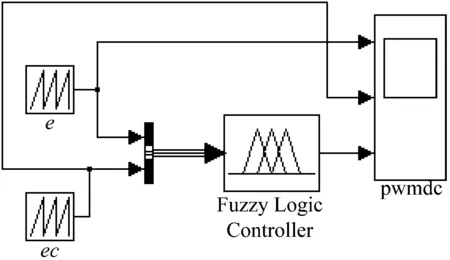
图8 模糊控制仿真模型
e采用[-5 5]锯齿波输入,ec采用[-0.5 0.5]锯齿波输入,仿真波形如图9所示。从仿真波形可以看出,当e和ec很大时,PWM占空比为60%,小车方向调整速度较快,避免了弯道循迹时小车抖动;当e和ec较小时,PWM占空比较小,小车方向调整速度较慢,以防止小车方向调整过度;当e和ec几乎为0时,表示小车正沿着轨道正常行驶,此时PWM占空比为80%,小车快速行驶。

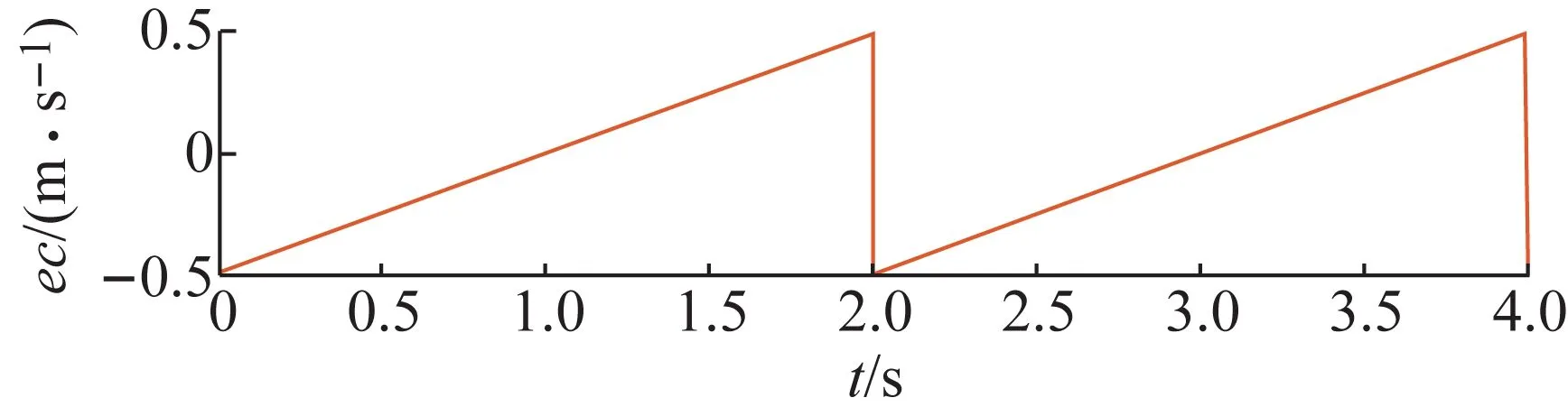

图9 模糊控制仿真波形
4 实验结果
为了验证模糊控制小车循迹的效果,在S形跑道、椭圆跑道和蛇形跑道上对小车性能分别进行了测试[14-16]。系统控制电路供电电压采用5 V,电动机驱动模块供电电压采用7.5 V。每种跑道分别测试10次,测试结果如表4所示。
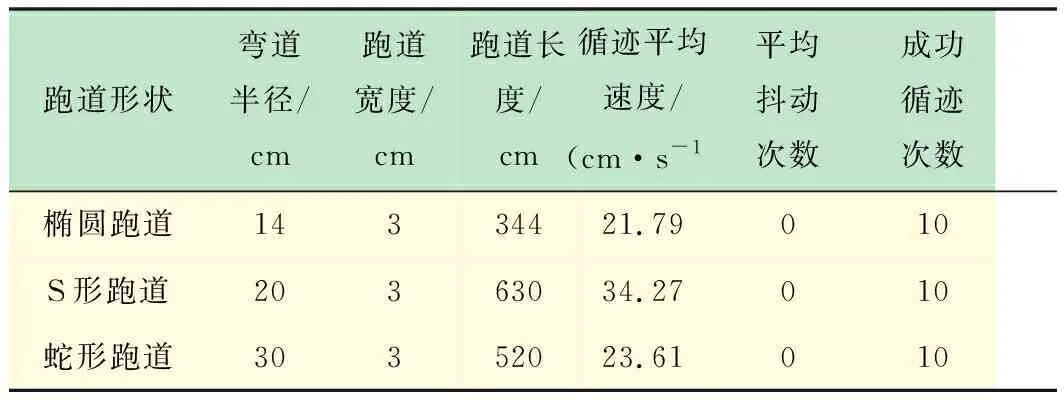
表4 测试结果
从表4可知,对于弯道半径大于10 cm的跑道,模糊逻辑控制的小车循迹流畅,基本没有抖动,每次都能成功循迹。根据S形和蛇形跑道测试数据来看,由于S形跑道弯道较短,小车循迹速度较快;根据S形和椭圆形跑道的测试数据来看,弯道半径越大,小车运行速度也越快。
5 结 语
本文介绍了红外循迹智能小车的循迹原理、红外接收抗干扰处理的方法,分析了小车弯道循迹过程中易冲出跑道和频繁抖动的原因和解决方案,并采用模糊控制策略对小车车速进行合理控制。实验结果表明,在跑道宽度适中的情况下,模糊控制的红外智能小车循迹流畅,速度较快,系统稳定可靠。