一种抗多径效应的非相干无人机测距方案*
2018-07-26饶俊
饶 俊
(中国西南电子技术研究所,成都 610036)
1 引 言
无人机测控系统具有对无人机进行遥控、遥测、跟踪定位和数据传输功能。一般来说,无人机测控系统由机上载荷和控制站两部分组成[1]。根据数据传输方向的不同,测控信号可分为上行链路和下行链路,上行链路主要用于在地面控制站与无人机之间传送遥控指令,下行链路则主要完成无人机至地面终端的遥测数据以及任务数据的传输,与此同时还要利用上下行链路实现测距功能。无人机上下行链路的带宽是不对称的,上行是窄带链路,下行是宽带链路。因此,非相干测距技术成为当前无人机系统应用最多的技术体制[2]。非相干测距需要地面机上同时测量数据,还需要经过下行链路将机上测量的数据传回到地面,所以下行数据传输的误码和下行数传信号的到达定时精度直接影响测距的精度。传统的非相干测距方法没有考虑多径衰落的影响,而无人机经常飞行在低仰角多径环境下,多径衰落信号对下行宽带信号的传输性能造成了影响,单载波频域均衡(Single-Carrier Frequency Domain Equalization,SC-FDE)技术能有效地对抗频率选择性衰落[3],提高无人机在多径衰落信道下的传输性能,从而提高无人机测控系统的可用性和测距精度。
本文提出并设计了一种抗多径效应的非相干无人机测距方案,通过仿真验证了方案能有效提高系统测距精度,满足系统指标要求。
2 工作原理
2.1 非相干测距工作原理
非相干测距原理如图1所示。非相干测距时,机上独立形成下行测距标志,与收到的上行测量帧头并不对齐[4],这是其与相干测距的区别。

图1 非相干测距工作示意图Fig.1 Working diagram of incoherent ranging
地面站在Tcs时刻发送定时标签为N的遥控帧,机上在Tcr时刻接收到定时标签为N的遥控帧。经过td时间后,机上在Tms时刻发送定时标签为M的数传帧,地面在Tmr时刻接收到数传帧M。地面在遥控发射时刻到数传接收时刻的时延包括机上收到遥控帧到发出数传帧的时延以及双向传输时间,则单向传输时间和距离分别为
ttr=[(Tmr-Tcs)-(Tms-Tcr)]/2,
(1)
R=ttr·C 。
(2)
式中:R为距离,C为光速。
由非相干测距的原理可知,非相干测距系统地面和机上都需要定时测量,测量的关键就是找到遥控、数传信号的发射和接收参考点。
2.2 SC-FDE工作原理
SC-FDE系统工作原理如图2所示。

图2 SC-FDE系统工作原理图Fig.2 Working diagram of SC-FDE system
在普通的频域均衡系统中频域均衡与信道译码是两个独立的部分,信息没有充分交互利用,导致解调门限偏高。为了解决这一问题,可以采用均衡与译码联合迭代技术,将译码器输出的软信息反馈给均衡器,并通过多次迭代,在均衡器和译码器之间充分交换信息以获得性能上的提高。迭代均衡的工作原理如图3所示。
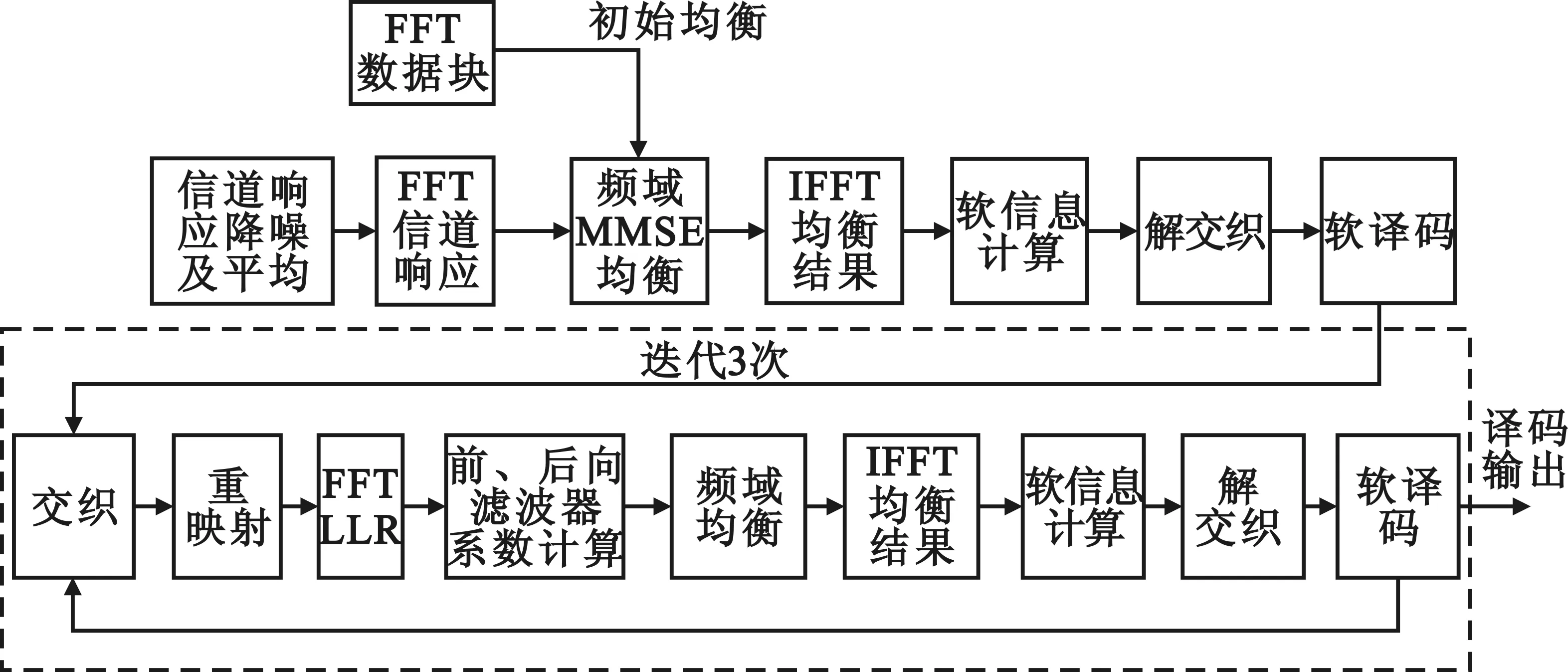
图3 迭代均衡工作图Fig.3 Working diagram of iterative equalization
根据图3,实现时采用4次迭代均衡,在得到频域数据和频域的信道估计结果后,进行第一次均衡,由于此时没有译码完之后的软信息,因此第一次均衡相当于一次MMSE均衡。之后的每次均衡都需要用到软信息并重新计算前、后向滤波器的系数进行均衡。译码完成后,对输出的硬判决信息进行CRC校验。若CRC校验正确,输出硬判决比特信息;若CRC校验失败,输出软信息,返回给均衡器进行下一次迭代均衡,最多不超过4次迭代。
3 方案设计
3.1 遥控帧发射参考点的选择
无人机系统的上行链路采用具有抗干扰特性的伪码扩频体制[5],因无人机系统要求快速建立测控链路,而采用的伪码周期一般都较短,靠伪码不能解距离模糊,所以需要利用遥控帧解决距离模糊问题。采用位同步环接收遥控帧,位同步环的精度与遥控帧的速率有关。由于遥控帧的速率较低,利用接收到的遥控帧帧头作为上行测量帧到达定时,精度不能满足要求,所以可利用遥控帧到达作为粗同步定时,同时利用实时扩频码相位作为精同步定时。为了提取粗同步和精同步定时标签,要求遥控帧的时钟由码钟产生,遥控帧在定时到达时,在最近的伪码周期脉冲的位置发出,保证信息钟相位的连续性且可利用伪码的周期脉冲提高位同步环的精度。伪码速率、遥控码速率和伪码周期须满足以下关系:
fp=a·fr,
(3)
2n-1=a·b。
(4)
式中:fp为伪码速率,fr为遥控码速率,n为伪码位数,a、b为任意整数。
按式(3)和式(4)要求设计遥控帧的速率和发送时刻。遥控帧的发送时刻和伪码的时间关系如图4所示。

图4 遥控帧发送时刻和伪码的关系图Fig.4 Relation between remote control frame′s end time and pseudo-random code
无人机的遥控帧一般为定时发送,遥控帧的发送周期远远大于伪码周期,当遥控帧定时到达时,在最近的伪码周期到达时候发送,每位遥控数据的发送时间可以发送a位伪码。
3.2 遥控帧接收参考点的选择
根据图4中遥控帧发送时刻和伪码的时间关系,机上在收到遥控帧的帧脉冲信息时,找到最近的伪码周期脉冲,如图5所示,当解调的帧脉冲到达后,查找离帧脉冲最近的伪码周期脉冲,如图5中的黑色粗线脉冲,此脉冲则为遥控帧到达的定时参考点Tcr,同时启动定时测量,在数传发送时刻结束计时,测量出遥控帧到达至数传帧发出的时延。

图5 遥控帧接收参考点的提取示意图Fig.5 Extraction diagram of remote control frame′s receiving reference point
3.3 数传帧的发送参考点
机上的数传信号采用定时发送,周期较快,在数传信号发送时刻Tms完成定时测量,记录下当前数传帧序号、遥控帧序号以及定时测量的结果,将结果插入到数传帧中发送。
3.4 数传帧的接收参考点
数传信号传输采用SC-FDE技术[6],信息速率一般都在2 Mbit/s以上,数传帧帧同步头的提取需通过模数转换后进行下变频、匹配滤波、同步、均衡、解交织和译码。根据图2所示的均衡工作原理可知信号迭加均衡的次数不确定,所以时延不确定,均衡后的数据到达不能作为数传信号的到达定时,只能选信号同步作为到达定时。而同步头和信息帧同时组帧调制输出,所以信号的空间传输时延和数传帧的空间传输时延相同,则以地面完成数传信号同步后的时间点作为数传帧的到达标志。
信号同步模块的实现[7]包括到达检测、频偏估计、定时跟踪、内插器和分隔符检测,处理流程如图6所示。

图6 同步模块实现示意图Fig.6 Implementation diagram of synchronization module
整个同步模块的流程,首先是进行到达检测,在到达检测完成后,同时进行频偏估计和定时跟踪;当频偏估计完成时,将频偏估计值输送到频偏补偿模块进行补偿;频偏补偿后进行内插,最后完成分隔符检测。
同步段采用多个级联的伪码序列作为训练序列[8],主要利用伪码序列良好的自相关特性完成到达检测、频偏估计、定时跟踪等一系列操作,当到达检测检测到有n个伪码序列到达时,则认为到达检测完成,所以到达检测的延时为固定的n个伪码序列。
到达检测处理完后,将捕获到的频点前馈至频偏补偿模块,频偏补偿模块根据捕获到的频率对数据做频偏补偿,经过频偏补偿的数据会被送入频偏估计模块对剩余频偏进行频偏精估计处理,因此这里也称频偏估计为频率精估计。频偏估计输出频率为精估频率,捕获频率为粗估频率。
频偏估计需要用m个伪码序列,因此经过m个伪码序列的时间后,频率估计模块已经完成了它的数据相关积分,此时已保存好了m个序列,用于后面的定时估计。定时估计利用m个序列完成估计,所以固定延时m个序列。定时估计完后,会将估计出来的定时偏差反馈至内插器进行偏差修正,并开始进行分隔符检测。当检测到设定的符号序列后,则完成了所有同步估计。
整个同步过程的延时为固定值,所以可从到达检测、定时跟踪和分隔符检测后提取数传信号到达时刻。如果利用到达检测完成标志作为定时标志,由于到达检测数据相关的步进为0.5 chip,所以到达检测都会存在的时间误差为
(5)
定时跟踪是利用开环[9]来实现的,采用的是早迟门同步的方法,它内部有两个积分时间相同的积分器,两个积分器输出的绝对值之差作为接收机符号定时误差的度量。由于定时跟踪的处理步进是0.25 chip,所以精度比到达检测的精度高。同时还要进行多次的相关积分,得到多次的鉴相结果,然后取其平均作最后的鉴相结果,即
(6)
式中:N取用于频偏估计的序列个数。
在多次相关积分后,定时跟踪的误差为
(7)
根据式(2)中距离与时间的关系,定时误差越小,距离误差越小,所以定时误差作为数传信号的到达定时带来的距离误差更小。
3.5 时延的测量
机上接收到遥控信号后进行解扩、解调、帧同步,收到遥控帧帧头时为机上定时测量开始的标志,再利用数传定时发送时刻对遥控信号采样,提取位计数nup1、扩频伪码计数mup1、码相位φup1,插入到数传帧中发送到地面;地面从遥控帧发出时启动定时测量,在数传信号到达的参考点记录遥控信号的位数nup2、伪码个数mup2和码相位φup2。由式(1)可知,机上和地面的时延为
(8)
(9)
式中:Tms-Tcr为机上收到遥控帧到发出数传信号的延时,Tmr-Tcs为地面发出遥控帧到收到数传信号的延时,fr为遥控码速率,fp为伪码速率。
根据式(3)中遥控码速率和伪码速率关系可得到机上和地面的时延为
(10)
(11)
由式(1)和式(2)可得到距离
(12)
4 仿真分析
4.1 定时跟踪误差
在莱斯衰落信道,两径时延为[0,2.5]μs,能量为[0,-6]dB条件下,定时跟踪的误差仿真结果如图7所示。

图7 定时跟踪误差曲线图Fig.7 Timing tracking error curve
从图7可看出,当信噪比高于4 dB时,定时误差在0.05 chip内的概率在97%以上;在AWGN条件下,信噪比大于4 dB时,定时误差在0.05 chip内的概率在98%以上,所以利用定时跟踪结束作为测距定时标志可提高下行信息帧同步的精度。根据式(2)可知,由下行数传接收参考点引起的最大误差为
(13)
所以在信息速率为2 Mbit/s情况下,由下行数传接收参考点引起的最大误差小于7.5 m。当信息速率越高时,测距误差越小,满足无人机系统要求的精度。
4.2 误码分析
由于本测距方法需要地面和机上同时测量数据,还需要经过下行链路将机上测量的数据传回到地面,所以下行数据传输的误码直接影响测距的精度及错误概率。利用SC-FDE技术可以增加在多径条件下传输机上测量数据的可靠性。
在同4.1节的仿真条件下,下行SC-FDE解调技术和传统数传解调技术下误码率曲线如图8和图9所示。

图8 单载波频域均衡技术误码曲线Fig.8 Error curve of SC-FDE demodulation

图9 传统数传解调技术误码曲线Fig.9 Error curve of traditional demodulation
从图8和图9可看出,利用SC-FDE技术后,在信噪比大于7 dB时,误码率小于10-5,基本不影响测距信息的传输,而传统数传解调技术受多径影响,误码率在信噪比大于14 dB条件下不能有效地降到小于10-5。无人机系统一般在信噪比大于7 dB下需满足测距精度,在传统数传解调技术下,误码率太高,测距错误率太大,不能满足测距要求。
5 结 论
利用SC-FDE和非相干测距技术的无人机测控系统可减小数传信号和机上测距数据在多径衰落信道下产生的误码,同时选取适当的下行帧采样点可以提高测距精度[10]。本文研究了同步误差受多径影响的解决方案,但没有给出机上接收通道对抗多径效应的处理方法。今后应增加对扩频抗多径效应的处理方法研究,以进一步提高无人机系统的测距精度。