基于传感器技术的平板电视非接触式定位的实现及应用
2018-07-23深圳创维RGB电子有限公司
深圳创维-RGB电子有限公司 闫 勇
一、引言
(一)传统的机械定位与视觉定位对比
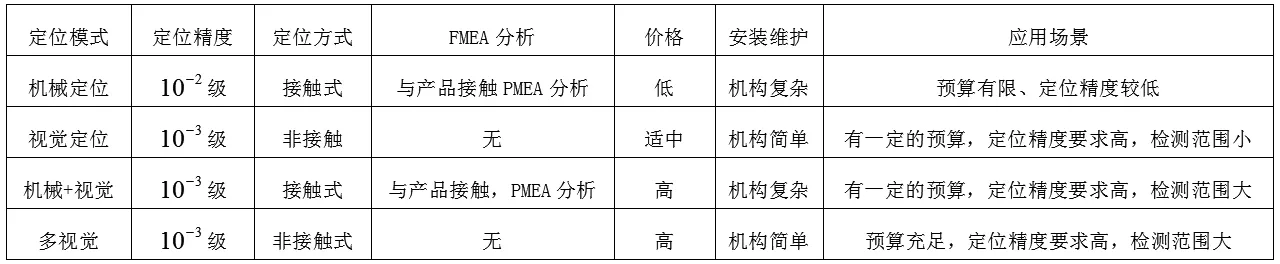
表1 机械定位与视觉定位比较
(二)定位模式选择分析
由表1可见,定位模式的选择与应用场所、技术精度、预算都有关系,在项目应用中可进行甄别选择。
1.机械定位造价低廉,但定位精度有限,且与产品直接接触,存在损伤产品的可能;
2.视觉定位造价较高,定位精度高,与产品不接触,安全可靠。
由此阐述一种安装简单,定位精度可控,且造价低廉的非接触式定位方法。
二、具体实现方法
(一)应用背景
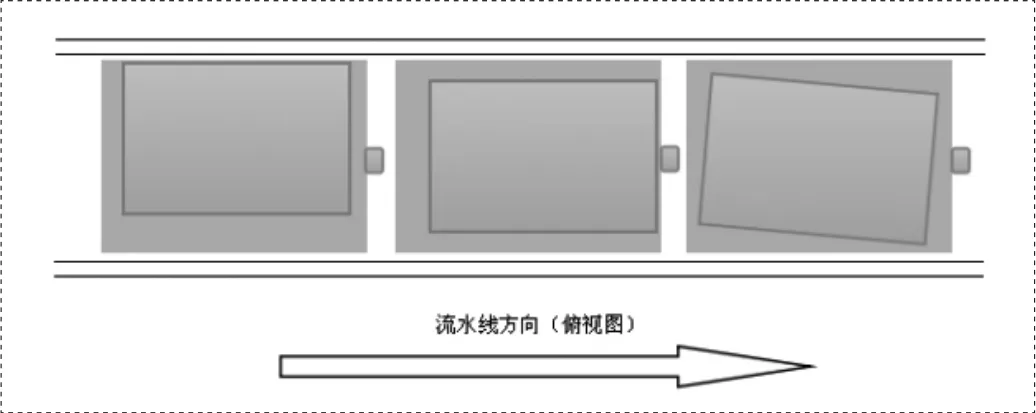
图1 应用背景图示
图1所示为彩电生产过程中,电视机在流水线上进行装配的工位示意图,电视机在流水线上进行装配时,由于工装板的冲撞、人员的拉动等因素每款电视机在流水线上装配生产中存在前后、上下及角度的不确定变化,如图所示。前后:流水线方向的前后;上下:电视机的天侧地测的上下,即垂直于流向方向的偏差;角度:电视机在工装板平面的角度偏移。
电视机产品为超薄、超大屏体,需要采用非接触式的视觉定位才能解决以上产品的定位问题,且由于相机视野大小及定位精度的需求,单个相机无法满足定位需求。
(二)解决方案
运用传感器技术,结合软件算法实现非接触定位需求。具体如图2所示,通过感应器1,2,3测试相关数据,通过数据分析几何计算即可获取到电视机在载体上的位置(前后、上下、角度)。
1.示意图具体说明
流水线:彩电生产线,工装板放置在流水线上,通过阻挡器的控制流水作业;
阻挡器:阻挡工装板;
工装板:在流水线上回流,电视机的载台;
感应器1,2:安装在线体边缘的固定位置,用于测距;
感应器3:安装在本工位机械手上,用于检测电视机边缘。
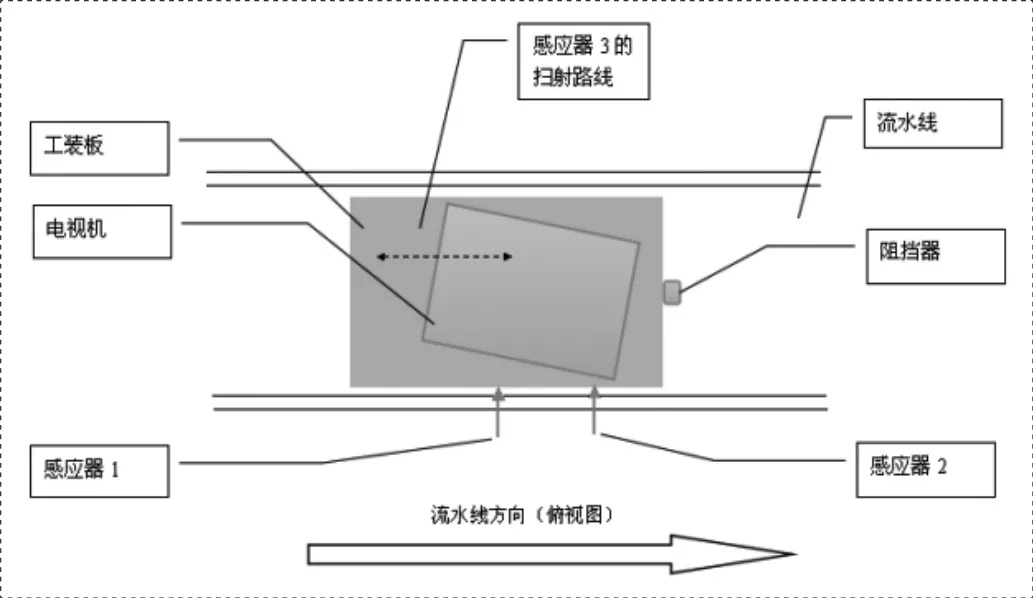
图2 传感器安装示意
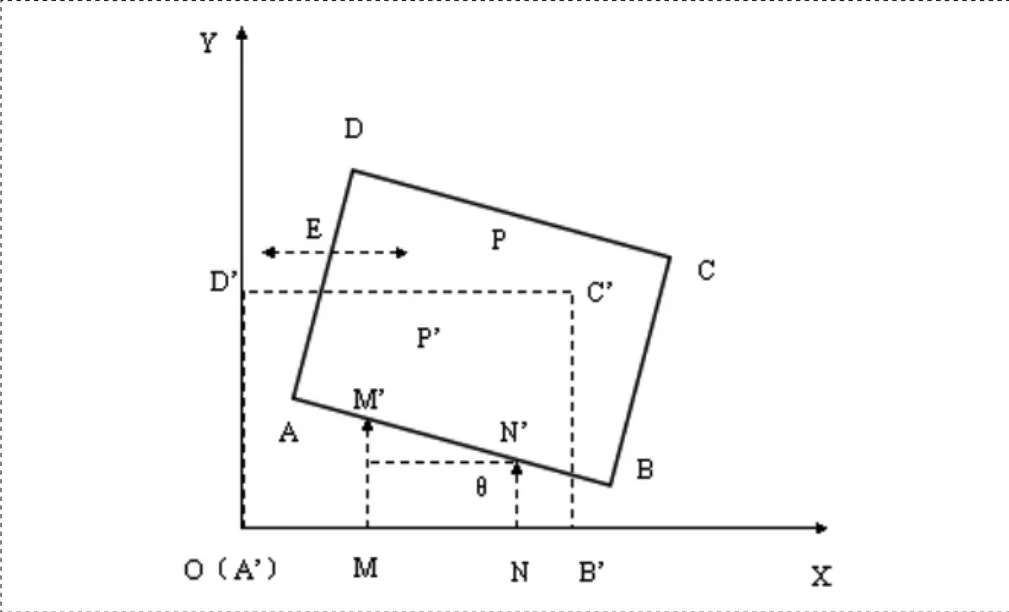
图3 建模图
2.建模
如图3所示,建立O-XY坐标系,设O(0,0)为原点,工装板的左下角位置,X轴为流水线方向,Y轴为水平垂直于流水线的方向;矩形ABCD为平板电视机,P(x,y)为电视机平面任一待测目标点,M、N为感应器1,2的安装位置,M’、N’为测距传感器与电视机的交汇点,矩形A’B’C’D’为将电视机摆正的位置点,E点为感应器3扫射与电视机AD边的交点,θ为电视机在工装板上的偏移角度,P’(x0,y0)为电视机摆正后的目标点,点位可测。
3.算法
由上述,设O(0,0);M(a,0);N(b,0);P’(x0,y0)为已知量;
由传感器1,2可测得,MM’=c,NN’=d;由传感器3可测得E(e,f);
电视机倾斜角θ=arctan(c-d)/(b-a);
直线AB的斜率k1=arctan(c-d)/(b-a);
M’的坐标为M’(a,c),N(b,d);
因为,直线AD与直线AB垂直,则直线AD的斜率k2=-1/k1;
根据M’(a,c),及k1可得直线AB的方程为:y=k1(x-a)+c;
根据E(e,f)及k2可得AD的方程为:y=-1/k(x-e)+f;
根据AD、AB的方程可得A点的坐标:x,x
P点的坐标为P’坐标加上A’到A坐标的偏移量:
x=x0+xcosθ;
y=y0+xsinθ;
由此便得到了目标点的坐标值,完成了目标点位的获取。
三、小结
本文阐述了一种,简单、实用、方便,性价比高的基于传感器技术的非接触式定位的实现方法,定位精度可控(基于传感器的精度),可应用于平面型产品自动化的定位,辅助定位,如条码采集的实现等。
四、展望
随着原材料成本及人力成本的逐年上涨,加之行业竞争越来越激烈,制造业尤其是彩电行制造业盈利点被极致压缩,所以制造业的转型升级是每个制造型企业当面临的重要抉择。传统的制造向智能制造转型无疑是一个行业趋势,在制造业推进智能制造的同时,也是需要应用一些实用性强、性价比高、满足工厂需求的技术创新点,高性价比的创新技术的大量应用能很大程度上为工厂降低成本,积累创新型的应用技术,为企业的转型升级贡献力量。
