一种孔径分割多功能雷达的实时任务调度方法
2018-07-23中国人民解放军95333部队陈光陆
中国人民解放军95333部队 陈光陆
0 引言
现代战场电磁环境日益复杂,使得多功能相控阵的综合化程度不断提高。孔径分割多功能雷达是将一个大的天线阵面分割成多个子阵面,某一功能的实现仅占用其需要的一个子阵面,因而可以同时完成雷达、电子战和通信等多种任务,极大提高了作战平台效率[1]。孔径分割多功能雷达任务多样,其工作时要完成的任务量较多,此时有限的时间资源和孔径资源难以满足众多任务的分配。因此研究如何充分利用资源、有效调度任务,对孔径分割多功能任务调度性能的提升有着重要意义。
文献[2-5]分析研究了常规相控阵雷达在时间资源约束条件下的任务调度,提出了相应的调度方法,但没有考虑孔径资源的约束。文献[6-7]分析研究了孔径分割多功能雷达在时间资源和孔径资源约束条件下的任务调度,提出了一种多任务并行EDF(MTPEDF)算法,该算法虽然实现了在时间资源和孔径资源同时约束条件下的多任务并行处理,但是没有考虑资源的充分利用,存在资源浪费的现象,导致在任务数量增多时,其调度效率较低。所以,本文在上述研究的基础上,针对孔径分割多功能雷达在任务调度时资源的充分利用,综合考虑时间资源、孔径资源等约束条件,提出了一种调度方法。该方法在时间上提出一种极大空暇间隔调度算法,在天线孔径上提出一种多通道并行处理的方法,二者综合运用,来实现孔径分割多功能雷达对任务的实时调度以及在负载饱和情况下的充分调度。最后对该方法进行仿真,仿真结果证明了该方法的有效性和优越性。
1 任务建模
多功能雷达的任务中既有雷达中的搜索、验证、跟踪、失跟处理等任务,还包括电子战中的侦察、干扰等任务以及通信中的指挥通信等任务,在此对其任务进行建模[6]:

式中:tei和tsi分别表示每个任务的期望执行时刻和实际执行时刻;Δti和Pi分别表示每个任务的所需执行时间长度和综合优先级;αi和wi分别表示每个任务需要占用孔径资源的百分比和时间窗。
1.1 综合优先级的设计
任务综合优先级的高低,取决于其工作方式优先级和截止期[2]。任务的工作方式优先级越高,则综合优先级越高;任务的截止期越早,则综合优先级越高。任务的工作方式优先级与其本身类型有关,根据专家经验事先固定,用pri表示;任务的截止期与其类型和期望执行时刻有关,表示为。在tp时刻任务qi的综合优先级Pi表示为:

其中pri和di分别表示任务qi的工作方式优先级和截止期。由于pri与di量纲不同,需分别进行归一化处理。本文中采用对工作方式优先级进行归一化,其中表示tp时刻任务集合最大工作方式优先级;采用对截止期进行归一化,其中,表示截止期与tp时刻的时间差,xmin,tp表示tp时刻任务集合最小xi;是对工作方式优先级和截止期的加权函数,函数表达式如下:

式中:η为加权值,其取值范围是[0, 1]。当η = 0时,截止期早的任务,其综合优先级都高于其他任务。当η = 1时,工作方式优先级大的任务,其综合优先级都高于其他任务。当η在这两个值之间时,综合优先级由工作方式优先级和截止期共同决定,可通过调整η的大小来控制二者对综合优先级各自的影响程度。当出现多个任务的综合优先级相同的情况时,则采用先入先出准则进行处理。
1.2 时间窗的分析
任务的时间窗就是任务实际执行时刻可以在其期望执行时刻前后移动的时间范围[5]。对于搜索任务,雷达波束在空域中扫描以发现新目标,并且只要雷达系统有空闲资源即用来执行搜索任务,所以搜索任务可能会提早或延迟执行。对于跟踪任务,雷达角度分辨单元有确定的范围,并且在实际中目标是在较远的距离之外飞过分辨单元,这个时间较长且可以估算,雷达只要在这个时间段内对目标执行跟踪任务即可,此时跟踪任务的时间窗可依据目标飞过雷达分辨单元的时间来进行设计。对于通信任务,可以根据通信等待期来设定时间窗。对于电子战任务,可以将雷达波束扫过侦察目标或干扰目标的时间分别设置为电子侦察任务和电子干扰任务的时间窗。所以,综合上述分析,对任务加以时间窗的约束是合理的。在现实情况中,由于多功能雷达要执行的任务较多,会使得一些任务在执行时间上发生冲突,而此时利用时间窗的方法,就有可能让这些任务都被调度执行,从而使多功能雷达能在调度间隔内调度执行更多任务,提高了系统的任务调度性能。
1.3 任务孔径资源占用率的分析
多功能雷达对某一任务分配孔径资源的多少可依据该务的作用距离[7]。多功能雷达中每种任务都有其最大作用距离,因此在分配孔径资源时可依据各个任务的作用距离来确定。下面以执行雷达任务和电子侦察任务时所需要的孔径资源百分比计算为例,分析说明怎样确定各个任务的孔径资源占用比例。
当系统工作于雷达模式时,雷达作用距离为[8]:

式中:Pt为雷达发射机峰值功率;Gt为雷达发射天线增益;σ为目标的雷达截面积;Ar为雷达接收天线有效面积;L为系统损耗;Smin为雷达最小可检测信号功率。
若天线单元总数为N,每个天线单元的发射机峰值功率和在阵面中占有的有效面积分别为Pe和Se,雷达工作波长为λ时,因为故雷达最大作用距离为:

当天线单元数目减少为n时,雷达作用距离为:

所以,当雷达任务距离为R0时,其孔径资源百分比为:

当系统工作于电子战模式时,雷达侦察作用距离为[9]:


当天线单元数目减少为n时,雷达侦察作用距离为:

所以,当侦察任务距离为Rr0时,其孔径资源百分比为:

同理,当多功能雷达执行通信等其他任务时,同样可以依据任务的作用距离来确定其孔径资源占用比例。
2 调度方法的设计与实现
2.1 调度方法的设计原则
通常情况下,雷达调度任务时,应当遵循下面几条原则:
(2)资源利用原则:

(3)期望时间原则:

2.2 调度方法的原理及具体实现
在雷达系统中设置多个任务处理通道,并将此时的目标任务按数量均匀分配给各个通道来进行处理。首先,各个通道将自己所分配得到的目标任务在时间上进行合理调度;然后,雷达系统联立所有通道,对在时间上调度完毕的目标任务进行孔径资源调度。
2.2.1 时间资源调度
调度器对任务时间资源调度的分析过程中,采用极大空暇间隔调度算法,即在调度上一任务时,要为下一任务留出尽可能长的空暇间隔,避免分割时间,实现尽可能多地安排任务。如图1所示,若任务qi按照图1(a)被调度,则任务qi+1就不能在此次调度间隔内被执行,将会被送入延时链表或删除链表;但任务qi若按照图1(b)进行调度,那么任务qi+1就能够在本调度间隔内被执行,从而系统就能够调度更多的任务。要实现这一目的,调度器就要根据各个任务的tei和wi,适度改变各个任务的tsi,以产生极大空暇间隔。

图1 任务时间资源调度示意图
第一步:从申请链表中取出任务qi*,设为任务qi*的最早可执行时刻,为任务qi*的最晚可执行时刻。根据tfi和tli确定其是否满足本间隔时间调度的要求。若满足,则转第二步;若不满足,则转第四步。
第二步:计算如下两个时间:
设:
具体算法如下:

有:

设:

有:
(T1, T2)为任务qi*的执行时刻在(tfi, tli)内移动时,所能够产生的空暇间隔的范围。
第三步:计算任务qi*的执行时刻在(tfi, tli)内移动时,(T1, T2)能够产生的极大空暇间隔ΔT,并将此时刻作为qi*的最终执行时刻tsi。如果有多个相等的ΔT的情况出现,则根据期望时间原则来安排任务的执行时刻。转第五步。
第四步:比较任务qi*的tli是否大于tn,若是,则移入延时链表;若不是,则移入删除链表。
第五步:检查任务申请链表是否为空。若申请链表不为空,则转第一步;否则说明所有任务申请都已处理完毕。
第六步:调度结束,得到该通道的待执行链表、延时链表和删除链表。
同理,其它通道同样采用极大空暇间隔算法对各自任务进行时间调度,得到各自的待执行链表、延时链表和删除链表。此时,调度器将对各通道待执行链表中的任务进行孔径资源调度。
2.2.2 孔径资源调度
调度器联立所有通道的待执行链表,对其中的任务分别进行孔径资源调度。如图2所示,各个通道的待执行链表在时间上并列,任务按照各自执行时刻的先后顺序再次经调度器分析,进行孔径资源调度。被成功调度的任务按照其所需进行孔径资源分配,并且执
行完后立即释放所占用的孔径资源。
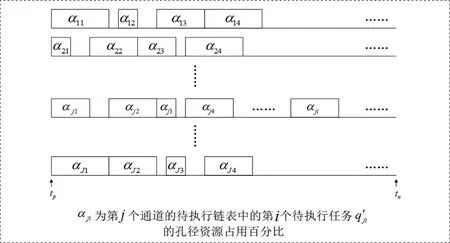
图2 任务孔径资源调度示意图
具体步骤如下:
对于所有通道的任务待执行链表,在[tp, tn]内,当调度器分析到某一时刻,假设此时的孔径资源中被占用百分比为αs,则剩余孔径资源为。
第一步:检查该时刻是否有任务执行完毕。若有,设其孔径资源占有百分比为αj0i0,此时。
第二步:检查该时刻是否有新的待执行任务。若有,则转第三步;若没有,则调度器分析下一时刻,并转第一步。
第三步:检查该时刻新的待执行任务是否为单个。若是,则转第四步,若不是,则转第五步。
第七步:该调度间隔分析完毕,得到各通道最终的执行链表、延迟链表以及删除链表。
调度流程图如图3、图4所示。
3 仿真试验及性能评估
3.1 性能评估指标
为验证该方法有效性,定义以下评估指标。
(1)调度成功率(Schedule Sccess Ratio,SSR):

式中:m为成功调度任务总数;N为所有请求的任务总数。任务调度成功率越大,雷达调度性能越好
(2)资源利用率(Resource Use Ratio,RUR):

式中:T为仿真时间长度。资源利用率表征雷达对时间资源和孔径资源的综合利用,资源利用率越大,雷达调度性能越好。
3.2 仿真分析
为证明本文提出方法的有效性,下面对该方法和MTPEDF算法分别进行仿真,利用评估指标对仿真结果进行分析对比。仿真中,除调度方法不同外,仿真参数设置完全相同。

图3 任务时间资源调度流程图
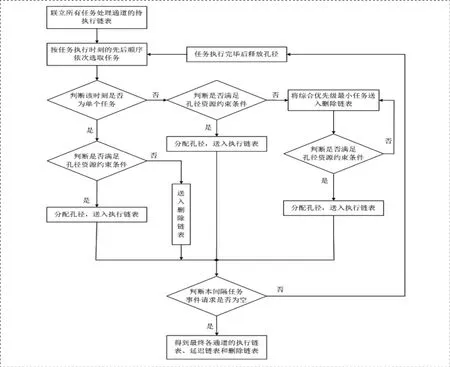
图4 任务孔径资源调度流程图
仿真参数:(1)调度间隔为50ms,任务处理通道为3通道,仿真时间为10s;(2)搜索任务在仿真开始就均按其更新率周期产生;(3)目标出现经验证后,对其进行跟踪,跟踪任务按其更新率产生;(4)验证任务由两部分产生:目标验证与虚警;(5)失跟处理任务在跟踪起始后按更新率产生;(6)通信、电子干扰以及IFF等其他任务在仿真时间内随机产生;(7)各个任务的孔径资源占用率和执行时间在实际中应根据系统的具体设计及实时情况来确定,在这里为便于仿真只做了简单设定。对于综合优先级设计中的权值η,设 η = 0.5。
任务的参数设置如表1所示。

表1 任务参数设置
下面对两种方法在不同任务数量情况下分别进行仿真,仿真20次取其平均结果,得到图5所示的调度成功率曲线和图6所示的资源利用率曲线。图中,方法一为MTPEDF算法,方法二为本文所提的孔径分割多功能雷达的调度方法。
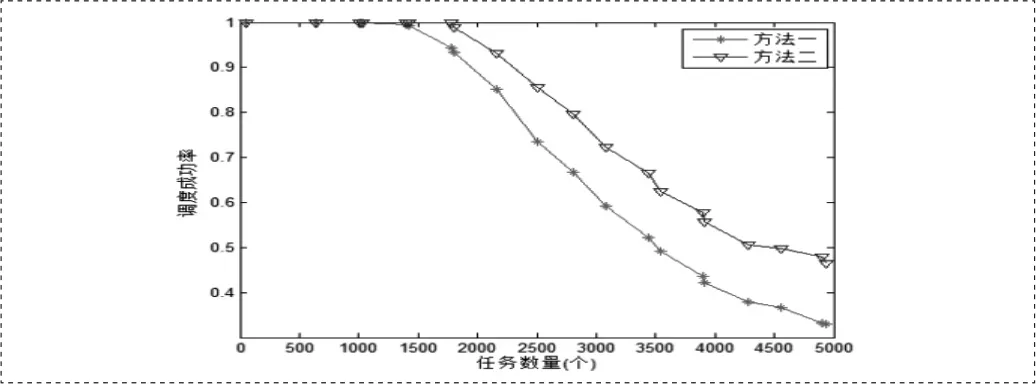
图5 调度成功率曲线图
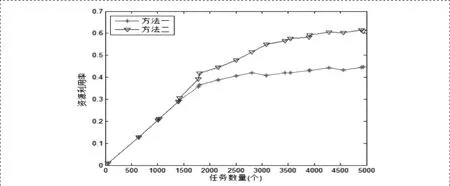
图6 资源利用率曲线图
结合图5和图6可知,当任务数量较少时,方法一和方法二都能调度全部任务,所以两种方法的调度成功率都几乎为1,资源利用率也相同。当任务逐渐增多,直至达到饱和,方法法一和方法二无法满足所有任务的执行,需舍弃部分任务,调度成功率开始小于1,并随着任务的增多而逐渐减小。此时方法二的调度成功率和资源利用率始终在方法一之上,并且两种方法调度成功率和资源利用率之间的差值也越来越大。在这里需要说明的是,图6中两种方法的资源利用率曲线始终处于上升趋势,这是因为当任务数量逐渐增加,高优先级搜索任务的数量也随之增多,其工作方式优先级较高,两种方法的任务调度数量中会有更多的高优先级搜索任务,而且其驻留时间较长,阵面资源占用比例较大,所以即使任务数量逐渐饱和,两种方法的资源利用率曲线始终保持者上升趋势。
综合以上分析可以看出,本文所提方法相比较MTPEDF算法而言,有效实现了资源的充分利用,极大提升了孔径分割多功能雷达的任务调度性能。
4 结束语
孔径分割多功能雷达能完成多种任务,并可以同时执行多个任务。本文针对孔径分割多功能雷达在实时任务调度时的资源充分利用的问题,提出了一种方法,详细介绍了方法的调度流程,并对其进行了仿真,仿真结果表明,该方法有效提升了孔径分割多功能雷达的任务调度性能。
