格栅反射器型面的主动控制
2018-07-23宋祥帅王恩美穆瑞楠谭述君兰澜
宋祥帅,王恩美,穆瑞楠,谭述君,兰澜
1. 大连理工大学 工业装备结构分析国家重点实验室,大连 116024 2. 大连理工大学 航空航天学院,大连 116024 3. 上海跃盛信息技术有限公司,上海 200240
随着空间技术的发展,卫星通信、对地观测、深空探测等领域对天线辐射频率和增益的要求越来越高[1-2]。根据经典的Ruze方程,为了实现天线的高增益,需要天线反射器具有很高的几何精度[3-4]。研究表明天线反射器的均方根(Root Mean Square, RMS)误差应小于其工作波长的1/50[5]。天线反射器的制造误差和在轨运行期间的热变形误差是天线最主要的误差来源[6-7]。尽管在天线设计时充分考虑了制造误差以及在轨热变形误差的影响,但仅依靠结构优化设计和地面调整等被动措施很难保证天线的在轨型面精度。因此,主动控制反射器的型面以修正型面误差、提高天线增益是必要的[8]。
压电作动器因具有响应速度快、定位精度高、作用频带宽等优点,在结构形状控制和振动抑制领域得到广泛的研究和应用[9-10]。为实现反射器结构的型面控制,国内外许多研究机构和学术单位均做了相应的探索性研究工作,所应用的压电作动器大致可分为3类:① 锆钛酸铅压电陶瓷(PZT)作动器[11-12];② 宏纤维复合材料(Macro Fiber Composite, MFC)压电作动器[13-14];③ 聚偏氟乙烯(PolyVinyliDene Fluoride, PVDF)压电作动器[15]。PZT压电作动器具有高刚度和高压电常数,适用于薄壳结构的形状控制;MFC压电作动器具有较好的韧性且压电常数与PZT压电作动器相当,但MFC压电作动器主要是粘贴在反射器结构的表面实现反射面的变形,因此其作用在结构上的弯矩较小,变形能力有限;相比于前两种压电作动器,PVDF压电作动器的刚度最低,可任意粘贴在结构表面,但其压电常数也是三者中最低的,多用于柔性较大的薄膜天线反射器。综合压电作动器的性能,固面反射器更适合采用PZT压电作动器;在作动方式上,由于面内作动方式反射器结构不需要刚性基底支撑,能够有效地减小结构的质量,更适合应用于空间反射器[16]。
本文以主控格栅反射器为研究对象,建立主控格栅反射器、压电作动器一体化有限元模型;针对反射器的变形能力,设计旋转抛物面形状为目标形状,采用影响系数矩阵法建立反射器型面控制优化模型并通过最小二乘法求解作动器最优控制律;搭建主控格栅反射器实验演示系统,验证建模方法的准确性和控制方法的有效性。
1 主控格栅反射器一体化有限元建模
格栅反射器主要由反射面、U型开槽的格栅和PZT作动器3部分组成,结构示意图如图1所示。U型开槽的格栅垂直安装在反射面的背部,以提供反射器足够的刚度;PZT作动器安装在U型槽内,通过对作动器施加电压诱发背部格栅产生面内弯曲,实现对反射器的型面调整。
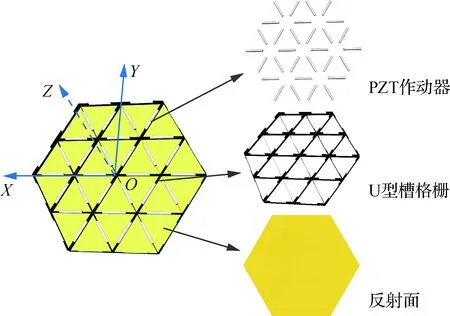
图1 格栅反射器结构示意图Fig.1 Schematic of reflector structure with PZT actuators assembled on ribs
1.1 格栅反射器和作动器有限元建模
碳纤维增强复合材料(Carbon Fiber Reinforced Polymer, CFRP)因其具有高尺寸稳定性、低成本、质量轻等特点,广泛用于航天器部件的研制[17]。格栅反射器的反射面和背部格栅均为8层CFRP层合板结构。采用ANSYS有限元分析软件建立反射器的有限元模型,反射面与背部格栅均采用四节点板单元,压电作动器采用两节点轴力杆单元。
1.2 作动器热载荷比拟法建模

忽略磁场效应和热压电效应,只考虑x3方向的变形并加入电学短路边界条件,压电材料的本构关系可表示为[19-20]
{σ3=c33ε3-e33E3
D3=e33ε3+ζ33E3
(1)
e33也可表示为
e33=d33c33
(2)
式中:σ3和ε3分别为压电片x3方向的应力和应变;c33为应力应变常数;D3和E3分别为x3方向的电位移和电场强度;e33为压电应力常数;d33为压电应变常数;ζ33为介电常数。
以压电材料本构关系式为基础,构造单元位移形函数和电势形函数,通过虚功原理可导出压电单元的平衡方程,其表达式为
(3)

图2 PZT作动器结构示意图Fig.2 Schematic of PZT actuator structure
(4)
(5)

(6)
弹性体由温度变化而产生的节点力为[18]
(7)
式中:α为热膨胀系数;ΔT为单元温度载荷。
比较式(6)和式(7),令相同电压和温度所产生的压电等效载荷与热弹性力相等,可得到压电应变与热弹性应变是相等的。因此可将PZT压电作动器驱动电压比拟为热载荷,得到等效的热膨胀系数为
α=d33/l
(8)
而热载荷可以采用ANSYS的节点温度载荷实现。
2 主控格栅反射器型面控制方法
对于在轨运行的天线反射器由于外载荷变化缓慢,可将反射器结构的变形过程作为静态或准静态过程进行分析。影响系数矩阵法假设压电作动器彼此之间是相互独立的,反射器变形为小变形,满足反射器变形位移与作动器输入电压的线性关系和叠加原理,该方法操作简单,同时具有较高的计算精度,在反射器型面主动控制方面得到了广泛应用[11-14]。
影响系数矩阵的列向量对应不同编号压电作动器施加单位电压、其他作动电压为零时反射面所有节点的Z向位移。对于本文的有限元仿真,依次对每个作动器施加单位温度(相当于单位电压),其他作动器的温度载荷为零,提取反射面所有节点的Z向位移作为该作动器对应的影响系数矩阵的列向量,将得到的每个作动器对应的列向量组装成影响系数矩阵。通过影响系数矩阵可建立输入电压与反射器变形之间的线性关系数学模型,其表达式为
zreal=BUu
(9)
式中:zreal为反射器采样点的Z向位移变化量;u为作动器输入电压变化量;BU为影响系数矩阵,BU(i,j)表示在第j个作动器上施加单位电压时,第i个观测点位置在Z向的位移。
建立反射器变形与作动器电压数学模型后可将反射器型面主动控制转变为求解反射器达到目标形状的作动器最优电压问题,具体表达式为
s.t. |u+u0|≤umaxi=1,2,…,N
(10)
式中:zdesire为反射器当前形状与目标形状的Z向位移偏差;u0为作动器的初始电压;umax为作动器允许最大加载电压;N为作动器个数。
目标函数为型面误差,控制变量为每个作动器的输入电压值,约束条件为作动器电压限值。利用最小二乘法求解作动器的最优输入电压。
3 数值验证
如图1所示,反射器内切圆直径为654 mm。反射面和背部格栅每层CFRP厚0.125 mm,铺层方向为(0°/45°/-45°/90°)s,单层CFRP材料性能如表1所示,表中E为弹性模量,ν为泊松比,G为剪切模量,下标1、2、3分别代表X、Y、Z方向。PZT压电作动器水平安装在U型槽的中间,反射器边缘格栅处没有安装作动器,整个反射器一共有30个作动器。为了便于后续辨别压电作动器控制电压施加位置,根据控制器形式,将30个作动器分为A、B两组,每组15个作动器,详细分组情况如图3所示。每节U型槽格栅长189 mm、高40 mm、开槽长度为100 mm、开槽深度为20 mm,反射器在作动器A2、B1、B3距离中心10 mm的格栅处固定约束,几何尺寸和边界条件如图4所示。PZT压电作动器选用哈尔滨芯明天科技有限公司生产的60VS12,其性能参数和等效参数如表2所示。
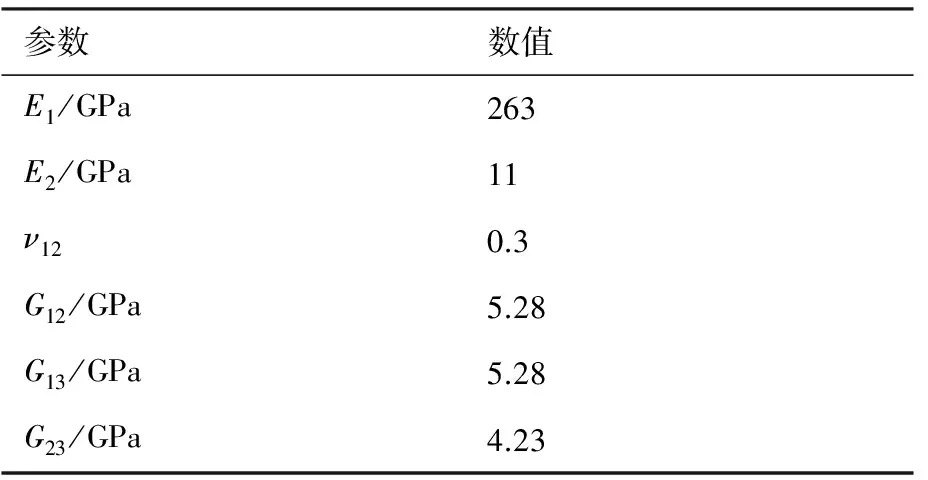
表1 单层CFRP材料性能Table 1 Material properties of single layer CFRP
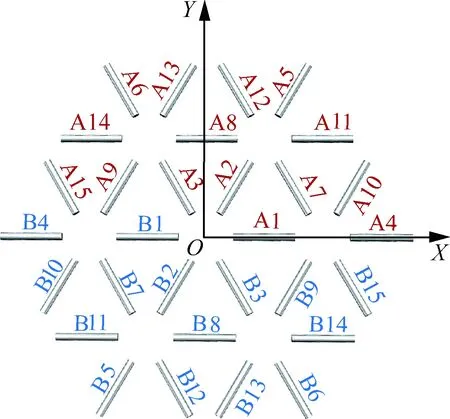
图3 PZT作动器分组Fig.3 Grouping of PZT actuators

图4 U型槽格栅几何参数和边界条件Fig.4 Geometric parameters of U-shaped rib and bounary condition
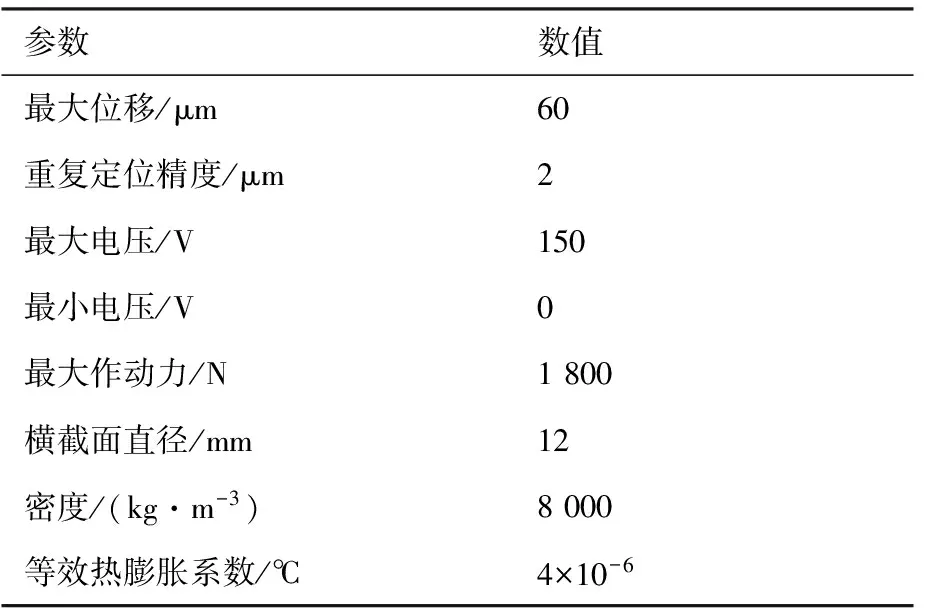
表2 PZT作动器性能参数和等效参数Table 2 Performance parameters and equivalent parameters of PZT actuator
算例中以旋转抛物面作为形状控制目标,抛物面方程为X2+Y2=2PZ,其焦距P=600 m。图5给出了反射器初始型面偏离目标型面的残差云图,反射器初始型面的RMS误差为48.5 μm。
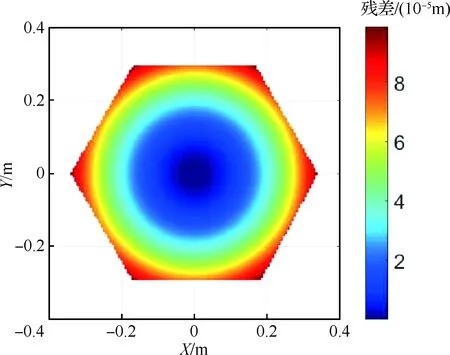
图5 反射器型面初始残差云图Fig.5 Contours of initial residual errors of reflector shape
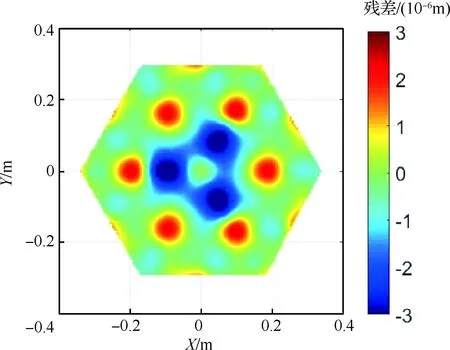
图6 控制后反射器型面残差云图(仿真结果)Fig.6 Contours of residual errors of reflector shape after control (simulation results)
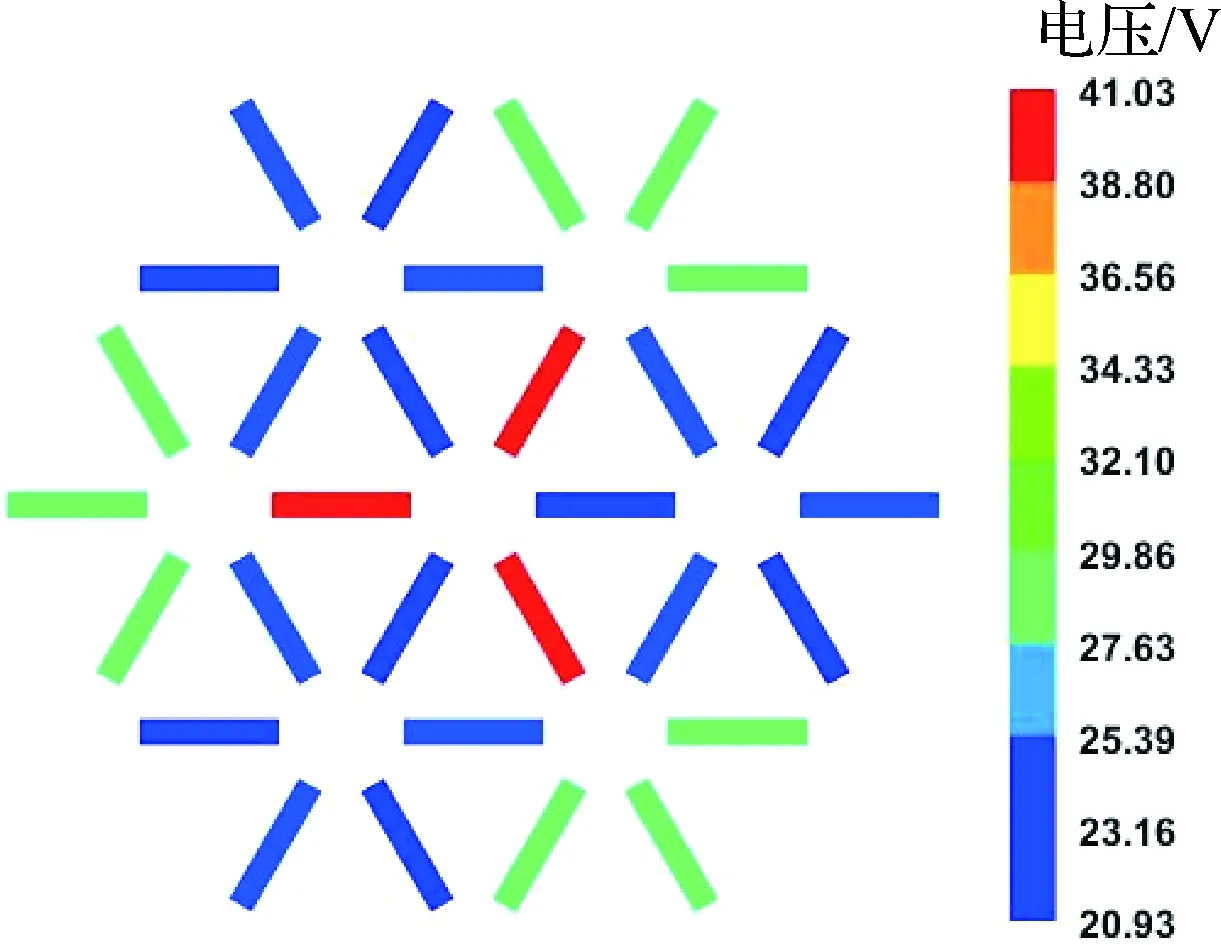
图7 作动器最优电压(仿真结果)Fig.7 Optimal voltages of actuators(simulation results)
图6给出了主动控制后反射面偏离目标形状的残差云图。从图6可以看出,控制后反射器型面基本达到了目标型面,反射面残差仅为1.1 μm。对比初始残差和控制后反射面的残差可以看出,反射面的RMS误差从48.5 μm降低到1.1 μm,型面精度提高了97.7%,仿真结果表明主动控制方法是有效的、可行的。图7给出了压电作动器的最优电压。由于所建立的格栅反射器和作动器分布是对称的,而且有限元模型是线性的且不存在模型误差,同时仿真中的边界条件和外载荷也是对称的,因此作动器的最优电压呈对称分布。
4 实验验证
为了验证建模方法的准确性和控制算法的有效性,搭建了主控格栅反射器实验平台如图8所示,该系统包括被控对象:格栅反射器实验模型;作动设备:30个PZT压电作动器 (2个压电作动器控制器、每个15通道);测量设备:V-STAR摄影测量仪;其他辅助设备:Newport光学主动隔振实验平台和反射器支撑结构。实验采用V-STAR摄影测量仪测量反射面的变形,通过粘贴离散的靶点来表征整个反射面,靶点区域为内切圆直径为596 mm的六边形。
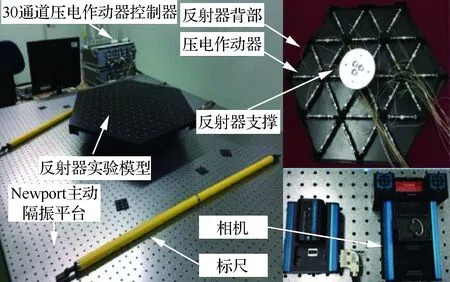
图8 主控格栅反射器实验演示系统Fig.8 Experiment demonstration system of reflector with PZT actuators assembled on ribs
4.1 主控格栅反射器一体化建模
实验首先采用V-STAR摄影测量仪测量反射面采样点的初始坐标,V-STAR摄影测量仪的测量精度为5 μm+5 μm/m;然后选取环向作动器A7和径向作动器B3分别施加150 V驱动电压,再次测量得到变形后采样点的坐标;最后将两次测量的Z向坐标求差,得到反射面Z向变形位移。由于V-STAR摄影测量仪每次测量得到采样点是在不同的坐标系描述的,因此需要建立统一的全局坐标系。全局坐标系Z轴垂直于光学实验平台,坐标原点为反射器的中心。
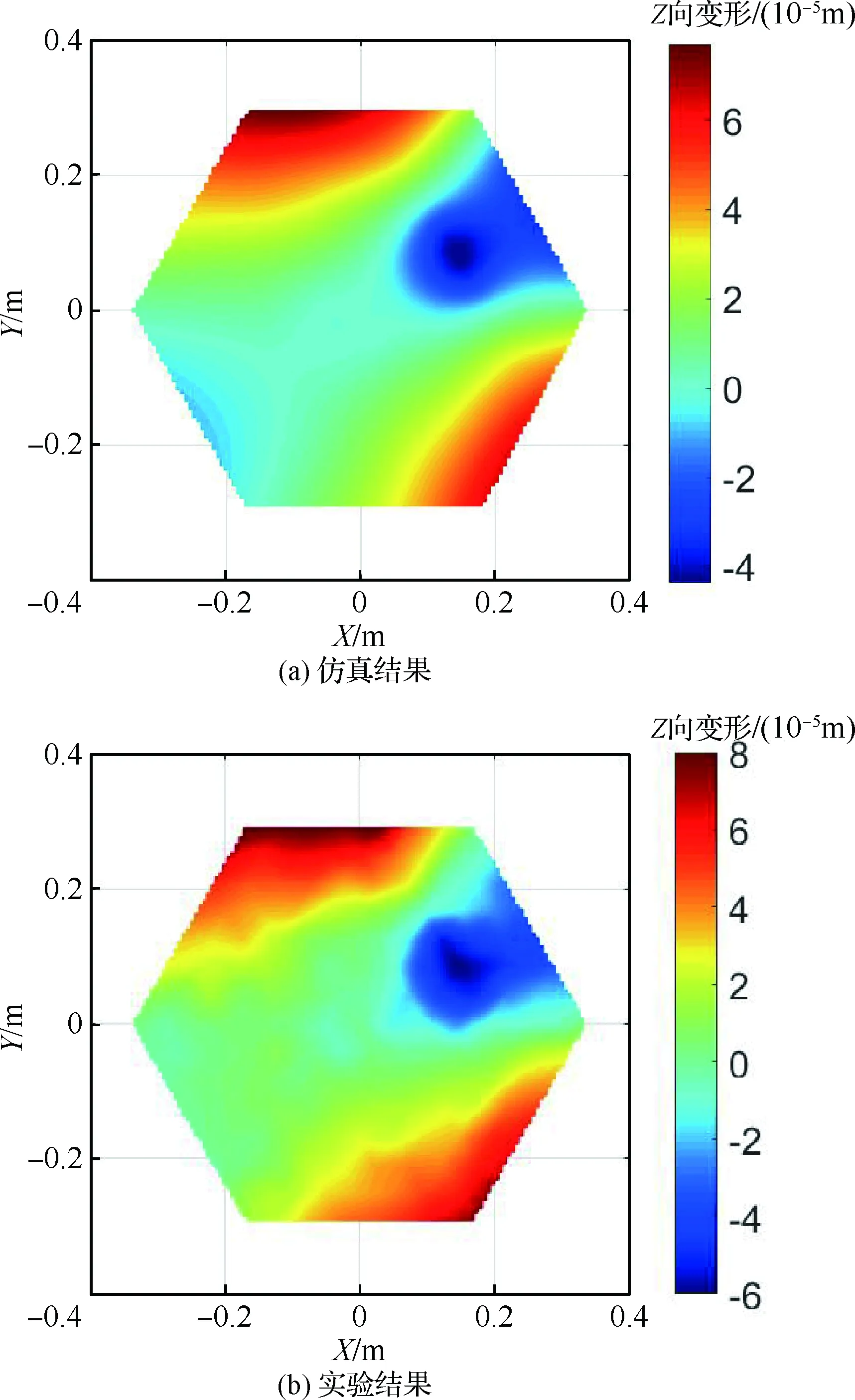
图9 A7作动器施加150 V电压后反射器的变形云图Fig.9 Deformation contours of reflector after A7 actuator applied with 150 V voltage
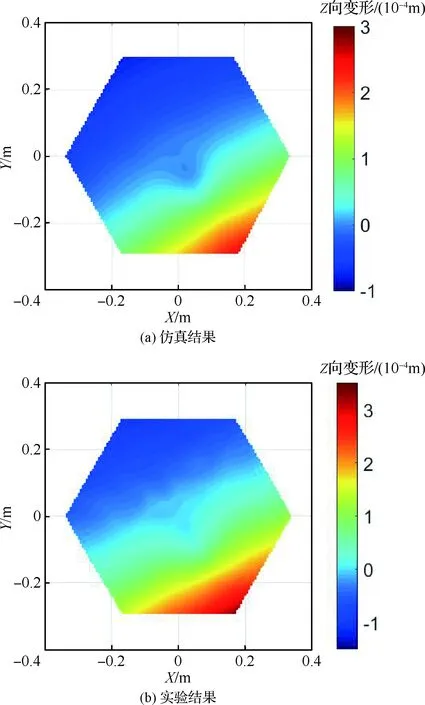
图10 B3作动器施加150 V电压后反射器的变形云图Fig.10 Deformation contours of reflector after B3 actuator applied with 150 V voltage
图9给出了A7作动器施加150 V电压后有限元仿真变形云图和实验变形云图。图10给出了B3作动器施加150 V电压后的仿真变形云图和实验变形云图。对比仿真和实验云图可以看出虽然反射面变形的峰、谷值有些差别,但是整体的变形趋势是一致的,因此所建立的模型是准确的且能够预测反射面的变形。分析导致仿真和实验峰、谷值存在差别的原因主要有以下几点:① 反射器的制造误差;② 摄影测量仪的测量误差;③ 有限元模型误差,建立反射器层合板有限元模型时忽略了不同铺层之间环氧树脂胶的影响;④ 作动器的安装误差,作动器安装时很难保证作动器与反射面平行且不存在预紧力。
4.2 格栅反射器型面主动控制
格栅反射器型面主动控制实验首先测量影响系数矩阵,影响系数矩阵的每一列对应不同编号压电作动器施加单位电压后反射面所有采样点的Z向位移。采样点Z向位移的具体测量步骤同4.1节,优化模型的建立和最优电压的求解同第3节。图11给出了控制后反射器型面残差云图,RMS误差从53 μm降低到27.1 μm,型面精度提高了将近50%,实验验证了控制方法是可行的。
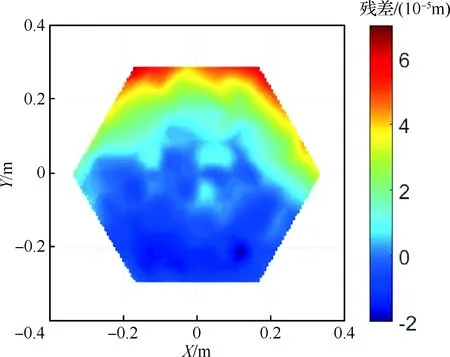
图11 控制后反射器型面残差云图 (实验结果)Fig.11 Contours of residual errors of reflector shape after control (experimental results)
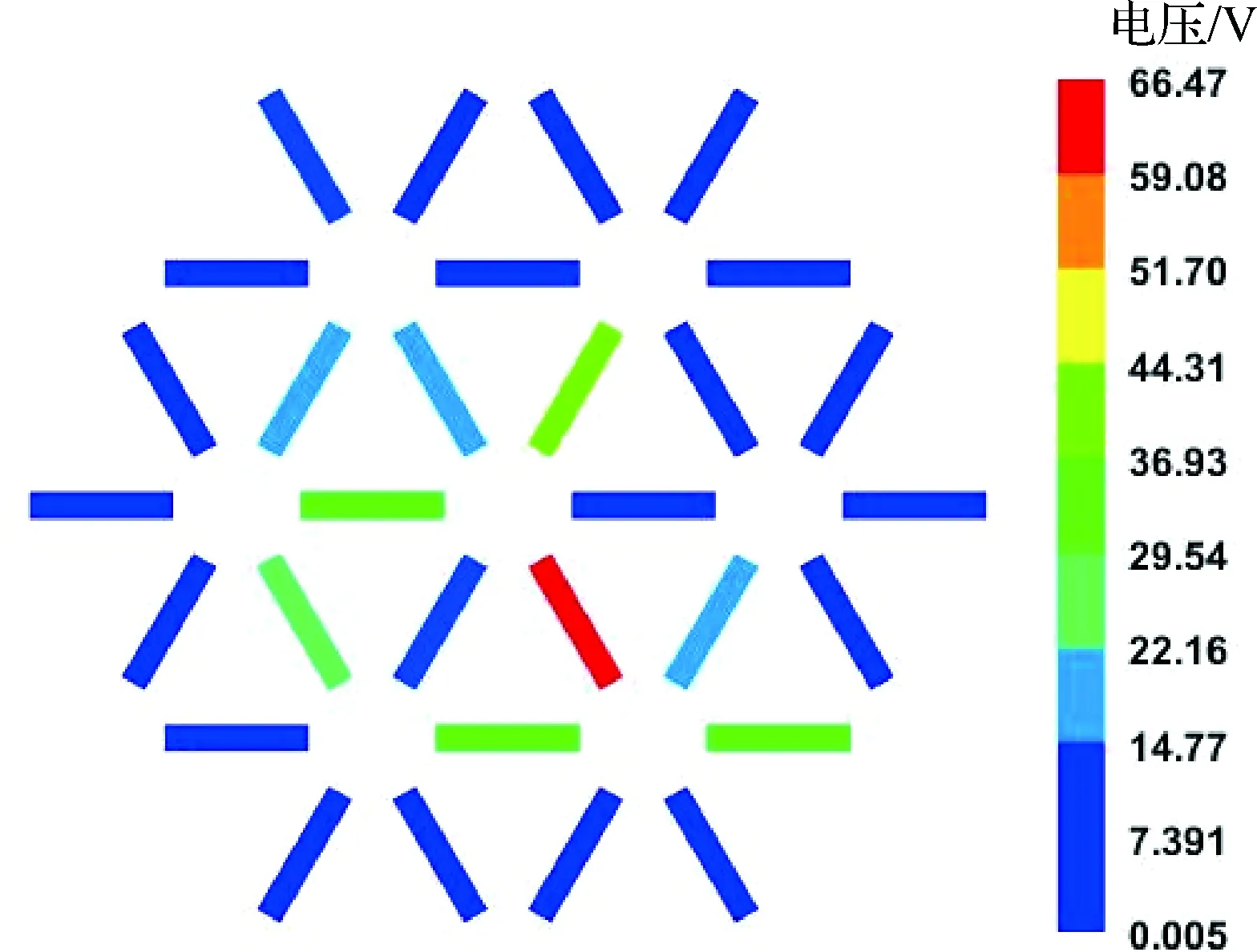
图12 作动器最优电压(实验结果)Fig.12 Optimal voltages of actuators(experimental results)
对比图6和图11可以看出,仿真结果明显优于实验结果,这主要是由文中采用影响系数矩阵法的假设所导致的。影响系数矩阵法假设主控格栅反射器系统的作动器输入电压和反射器型面变形之间的关系是线性的。该假设对于小变形下格栅反射器的有限元模型、PZT压电作动器的热比拟等效模型的描述是完全成立的,因此仿真的控制效果非常理想。然而对于真实的实验系统,考虑到PZT压电作动器的工艺水平,其输入电压和输出位移不完全是线性的(尤其在接近最大电压时),再加上格栅反射器的制造误差、以及摄影测量误差等因素,使得实际测得的影响系数矩阵对实验系统模型的描述存在一定程度上的近似。因此,与仿真结果相比,实验结果存在一定的误差。而实验结果将型面精度提高了近50%,也说明了影响系数矩阵法对实验系统模型近似描述的有效性。图12给出了作动器最优电压的实验结果,与图7对比可以看出作动器电压分布的实验结果并不具有理论仿真结果的对称性,这主要是由于试验中的反射器和作动器均是手工安装的,很难保证结构完全对称。
5 结 论
以主控格栅反射器为研究对象,研究了反射器、作动器一体化建模和型面控制问题,并完成了数值仿真和实验验证。研究结果表明:
1) 采用PZT压电作动器控制反射器的型面精度是可行的。
2) 热比拟法结合有限元法建立的反射器一体化模型能够准确预测反射器变形。
3) 采用影响系数矩阵法结合最小二乘法实现主动控制格栅反射器的型面控制是可行的,实验结果表明反射器型面精度提高了将近50%。
(A1)
根据应变位移的几何关系,杆单元沿x3向的应变可表示为
(A2)
根据式(A1)和式(A2),杆单元沿x3向的应变与位移关系可表示为
(A3)

对于并联的压电陶瓷片,当x3∈[(k-1)lkl],k=1,2,…,n时,电势呈线性分布。构造单元电势形函数,通过形函数插值,压电作动单元的电势函数可表示为
(k-1)(φ2-φ1)+φ1=NφΦ(e)
(A4)
压电单元电场强度可表示为
(A5)
压电单元变形方程可以通过虚功原理得到,虚功原理表达式为
δU+δW=0
(A6)
(A7)
δW=-δ(q(e))TF(e)
(A8)

将式(A3)和式(A5)代入(A7),即
(A9)
将式(A8)和式(A9)代入式(A6)可得压电单元变形方程为
(A10)
(A11)
(A12)