摩擦纳米发电机的自驱动手指动作传感器
2018-07-11,
,
(郑州大学 物理工程学院,郑州 450001)
引 言
手指是人体中最有特色的器官之一,有着无可替代的地位。已研发的适用于手指发出行为指令的“机械手套”等虽然可以帮助完成人类无法完成的操作,但是耗能、笨重的缺陷也日益彰显。传统的以蓄电池为电源的传感器具有一定的局限性,并不能适用于在各种场合感应信号并传递信息。因此,寻求更便捷、适用性更广泛的无线传感器是物联网、生物传感[1]等未来科技产业发展的一个重要问题[2]。
摩擦纳米发电机[3-4]的出现很好地解决了这个问题。本文将摩擦纳米发电机安装到一个指环上,通过手指弯曲的微小动作可使该传感器最大产生1.1 V的电压,通过电压比较器的检测再用单片机进行处理并通过WiFi模块无线传输实现家用电器的无线控制。
1 手指动作传感器装置结构图
摩擦纳米发电机的封装结构如图1(a)所示。用多孔聚四氟乙烯薄膜和铜箔作为摩擦层,将双面导电的铜箔粘在多孔聚四氟乙烯薄膜上作为集电极,并在两个摩擦层之间放置0.5 mm的硅橡胶作为间隔层,保证摩擦层之间有足够的空间进行接触分离。两端用具有韧性的聚对苯二甲酸乙二醇酯作为基底,最后用聚酰亚胺(Kapton)薄膜将纳米发电机封装起来,增强器件的抗干扰能力。其中用双向拉伸工艺[5]制成的多孔聚四氟乙烯薄膜的电子显微镜照片如图1(b)所示。整个器件的尺寸为1.0 cm×0.5 cm,实物图如图1(c)所示,整个装置组装完成后佩戴在手指上的效果如图1(d)所示。
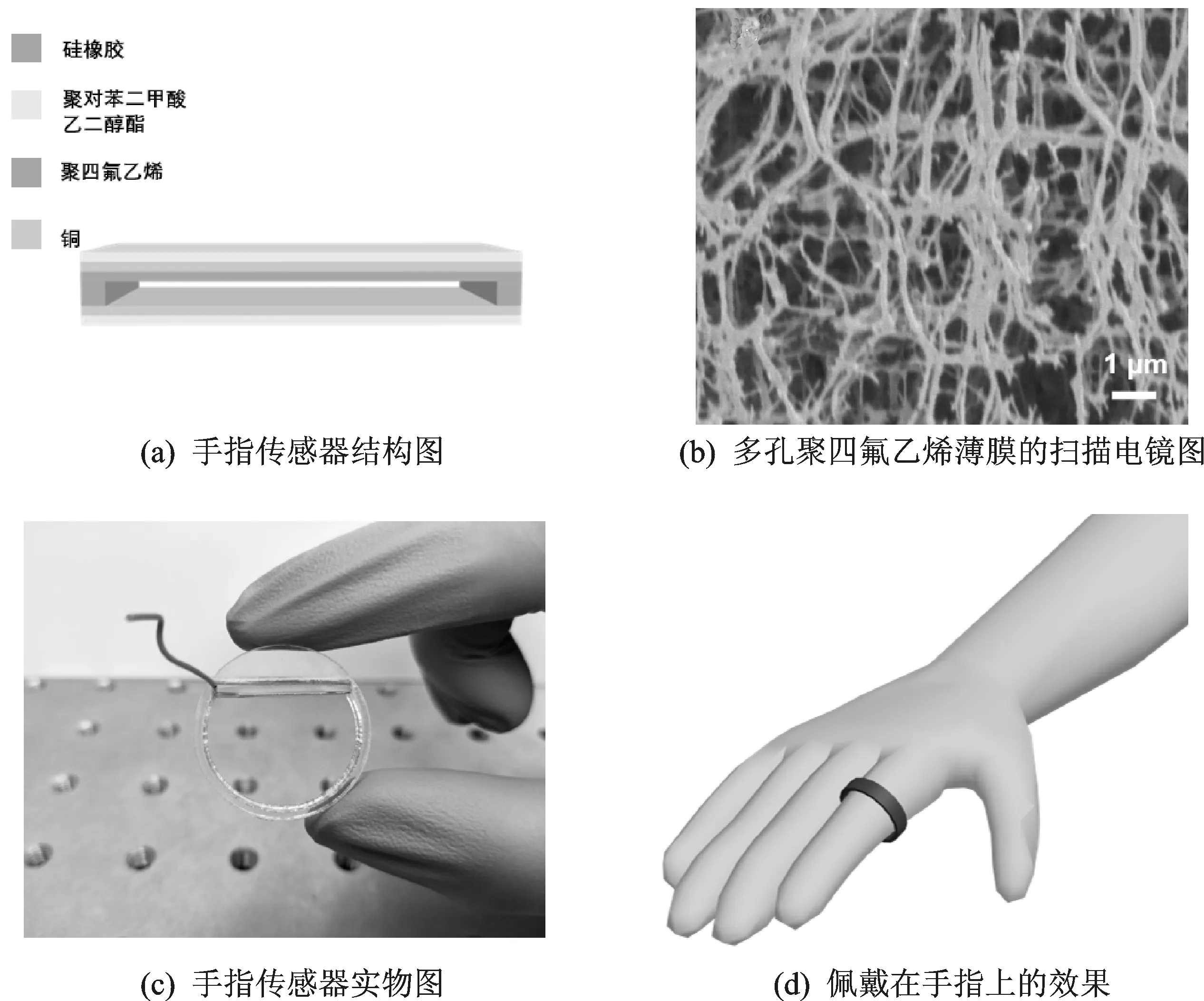
图1 手指传感器封装图

图2 摩擦纳米发电机的工作原理
2 手指动作传感器工作原理

图4 无线手指动作控制的智能家居系统流程图
当手指关节弯曲挤压时,摩擦纳米发电机的两个摩擦层相互接触,由于摩擦电效应使两个电极表面发生电荷转移,从而产生电压信号,整个过程如图2所示。当外力作用于纳米发电机上,聚四氟乙烯薄膜和铜箔相互接触,由于两种材料对电子的吸附能力不同,聚四氟乙烯薄膜吸附电子表面带负电荷,铜箔失去电子表面带正电荷。一旦两个表面分开,这两个表面之间就会产生电势差,导致电子流动。贴附在聚四氟乙烯薄膜上的铜集电极感应出正电荷。当摩擦层的距离达到最大时,就会产生静电平衡。随后,当在外力的作用下,聚四氟乙烯薄膜再次与铜箔接近时,会产生相反的电势差,电子沿相反的方向流向顶部电极。当周期性施加外力时,纳米发电机会持续产生脉冲信号[6]。
3 手指动作传感器的电信号输出
为了证明纳米发电机能用来准确感知手指弯曲的动作,采用一个模态激振器对纳米发电机进行标准测试。通过改变激振器的振动频率,可以看到电压信号随着振动频率的增加而上升,如图3(a)所示。最后,在同一频率下改变力的大小,得到的输出数据如图3(b)所示,说明摩擦纳米发电机产生的电压信号与外部压力的大小频率有直接关系。
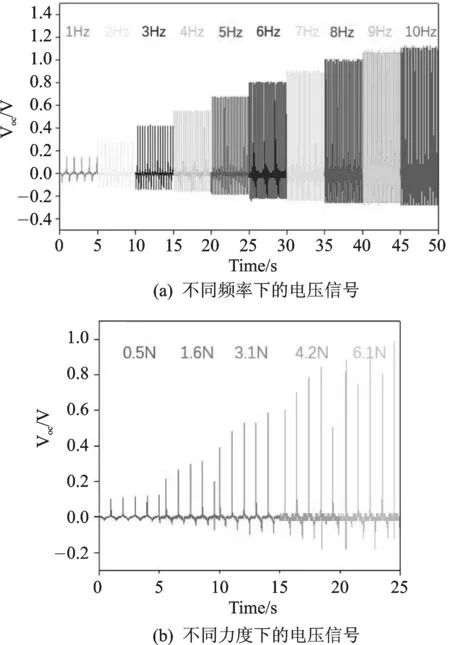
图3 传感器的电压输出特性
4 应 用
由于摩擦纳米发电机有以上特点,本文设计了一个无线手指动作控制的智能家居系统,包括基于摩擦纳米发电机的手指动作传感器、电压比较器模块、单片机、WiFi模块如图4所示。其中电压比较器模块通过设定阈值检测纳米发电机产生的电信号,单片机和WiFi模块通过将接收到的信号无线传输给所需要控制的电器。当手指弯曲时,摩擦纳米发电机产生一个类似正弦的电压信号,通过电压比较器检测纳米发电机产生的电压信号,可以将其转化为5 V的方波信号传输给单片机。最后通过WiFi无线控制家用电器的开关。整个信号处理的过程如图5所示。

图5 信号处理流程图
结 语

