一种激光半主动导引头高集成数字处理机的实现
2018-07-11彭晶晶成志锋黄红云陈蕙心
彭晶晶,刘 辉,成志锋,黄红云,陈蕙心
(上海无线电设备研究所,上海,200090)
0 引 言
激光制导武器具有打击精度高、成本低、抗干扰性能好等优点,成为空对地精确打击的主要手段,是各国竞相研制的重点技术领域。随着无人机的广泛应用,国内的激光制导武器也发展迅速,无论是导引头本身还是激光目标指示器,都在不断地朝着通用化、标准化、系列化、小型化及多功能方向发展[1],这就对激光半主动导引头提出了更高的要求。
为了搭载小型无人机等多种平台,以及开展多模复合导引头技术研究,本文提出一种基于Virtex系列FPGA芯片设计的数字处理机。该处理机结合IP核(Intelligent Property Core)模块化设计,可实现激光导引头数字处理机全部功能,并集成伺服控制系统的控制功能,提高了激光半主动导引头的集成度,具有很高的移植性,完成了导引头小型化设计,可广泛应用于其它小型或复合类型的激光半主动导引头。
1 激光半主动导引头数字处理机介绍
激光半主动导引头主要包括数字处理机、光学目标探测系统、伺服控制系统、二次电源,接口关系如图1所示。其中,光学探测系统完成激光目标回波信号的探测及放大,数字处理机进行目标识别判定并输出控制信号,伺服控制系统实现目标跟踪及弹体扰动隔离,二次电源实现导引头各系统的供电功能。

图1 激光半主动导引头组成示意图Fig. 1 Schematic diagram of semi-active laser seeker compositon
数字处理机是以CPU为核心、以软件为基础的实现多功能数字信息处理的平台[2],其功能涉及目标信号的高灵敏度检测、目标信号判定、角度信号快速准确提取、目标信号稳定跟踪、干扰环境下的对抗、参数预装订、制导指令信息提取、与弹上计算机之间信息传递、导引头工作时序控制以及工作逻辑管理等。
传统的激光半主动导引头各分系统均独立设计,并有各自的处理电路,使得系统体积庞大。同时,数字处理机的硬件电路也比较复杂,一般采用FPGA结合DSP及相关外围电路来实现,器件种类繁多,难以实现激光导引头小型化设计。本文则提出一种以单片FPGA芯片为核心的嵌入式数字信号处理平台,结合IP核设计技术,将制导信息提取、目标识别与抗干扰、伺服系统控制等关键功能实现,完成传统数字处理机全部功能的同时集成伺服系统控制功能,满足了导引头的小型化需求,该数字处理机组成如图2所示。

图2 数字处理机组成框图Fig. 2 Block diagram of digital processor composition
数字处理机通过目标采集模块、控制电压输出模块、逻辑管理模块完成目标探测信号采集以及光学探测系统自适应控制;通过位置信息采集模块提取方位信息;通过串口通讯模块接收陀螺信息并控制信号产生模块完成对伺服系统的控制;通过串口通讯模块完成与弹控系统实时通信。所有功能由FPGA控制完成。
2 数字信息处理机主要功能模块
2.1 制导信息提取模块
数字处理机完成制导信息提取,形成指令信号后送到导弹控制舱,控制导弹的飞行姿态,处理过程如图3所示。激光半主动式导引头采用四象限(或双四象限)光电探测器进行目标探测,并用和差比幅设计进行目标位置解算。经目标反射的激光光斑经导引头光学接收系统在四象限光电探测器上成像,形成四象限输出信号,经过低噪声放大器放大后送到数字信息处理机,进行实时采样、目标检测与角度误差信号提取。

图3 激光目标信号处理示意图Fig. 3 Schematic diagram of target signal processing
当数字处理机接收的四路信号的和信号超出检测门限时,对四路信号进行高速采样,提取四象限放大信号的电压值,经过和差计算得出目标信号角位置(X,Y)为
(1)
(2)
式(1)、(2)中,Kx和Ky是常数因子。
数字处理机根据式(1)、(2)计算所得的目标信号位置转化为导引头光学天线轴线与目标视线之间的视线角速度信号,送至导弹控制舱形成制导指令,同时送给伺服控制系统控制光学天线稳定指向目标。
数字处理机的制导信息提取精度对激光半主动制导武器系统的制导精度起着关键作用,因此该模块设计时须考虑四路目标信号电压提取的一致性,避免出现采样时刻不同导致的视线角速度偏差太大,影响制导性能。
2.2 目标识别与抗干扰模块
数字处理机的目标识别与抗干扰模块对接收的目标信号进行分析判别,通过分析判断是真实目标还是干扰信号并进行相应的处理,避免导弹被干扰信号干扰而跟踪错误的目标。随着激光侦察和制导技术的不断发展,针对它的干扰技术也得到了迅猛的发展,包括有源干扰(欺骗式干扰、压制式干扰)和无源干扰(消光类干扰)等[3]。因此需要对激光导引头增加抗干扰策略,该数字处理机采用的就是激光精确编码、波门设置组合抗干扰方式。
激光精确编码抗干扰指激光目标指示器采用编码方式照射目标,导引头数字处理机预先知道指示器的码型和周期,通过对接收目标信号分析得到接收信号的码型和周期,从而正确识别激光目标指示器照射的目标信号,实现对真实目标的稳定跟踪。
波门设置是激光半主动导引头采用的最为基本的脉冲时序控制措施,可分为固定式波门、实时性波门、偏置式波门等。数字处理机根据接收的弹上计算机指令预先设定激光制导信号脉冲的编码规律,在制导脉冲到来的时刻,精确设置开启和关闭时间波门的时间[4],以避开干扰信号的接收时间,提高导引头的抗干扰能力。此方法主要用于后向散射干扰以及其它激光干扰。
数字处理机的目标识别与抗干扰模块对整个武器系统非常关键,需从接收的目标信号中正确识别出真实目标并实现对真实目标的抗干扰跟踪。目前的策略可以满足现状需求,但仍需进一步开展抗干扰策略研究。
2.3 伺服控制模块
激光半主动导引头的伺服控制系统包括预定回路、稳定回路以及跟踪回路。预定回路完成对导引头偏航和俯仰角度的预置,稳定回路完成陀螺信号处理、方位环稳定控制、俯仰环稳定控制,跟踪回路指稳定回路与接收机闭合。伺服控制系统工作原理如图4所示。

图4 伺服控制系统工作示意图Fig. 4 Schematic diagram of servo control system working
在FPGA内部设计嵌入式伺服控制模块,实现伺服控制回路各个环节的数字化。控制器输出PWM信号送入功率驱动器驱动直流电机,经减速器驱动伺服机构转动镜头,由轴角编码器测得天线转角位置反馈完成预定回路控制,经陀螺测速测得平台的角速度完成稳定回路控制,控制器与接收机反馈信号闭环,完成目标视线角速度跟踪回路控制。
2.4 工作时序管理模块
激光制导导弹有多种工作模式,根据采用的激光目标指示器可分为地照模式和机照模式。地照模式时,激光目标指示器与导引头之间无法精确实现同步控制;机照模式时,激光目标指示器与导引头同时挂在飞机上,通过同步波门同时控制指示器与导引头以解决同机照射干扰。激光制导根据截获方式可分为发射后捕获和发射前捕获两种工作模式,发射前捕获要求导引头的作用距离要远一些。
数字信号处理机的工作时序管理模块需根据激光制导导弹工作模式制定不同的处理策略,实现对激光导引头的工作时序管理。按照时间顺序可分为系统自检阶段、参数预装阶段、目标搜索阶段、目标识别抗干扰阶段、稳定跟踪阶段、丢失后处理阶段、目标再次截获稳定跟踪阶段,如图5所示。

图5 激光半主动导引头工作流程示意图Fig. 5 Work flow of semi-active laser seeker
3 数字处理机工程实现
3.1 硬件平台
该数字处理机围绕Xilinx公司Virtex系列FPGA芯片(XC5VSX50T)设计硬件系统,是一款面向通信领域的高性能嵌入式处理平台,主频高达550 MHz,可实现100 Mb/s~3.75 Gb/s高速串行通信。该FPGA芯片集成了DSP处理核、时钟管理、RAM等常用功能模块,使FPGA可成为系统级设计工具,硬件上减少了多种器件,大大提高了数字信息处理机的集成度。
数字处理机的硬件系统结构如图6所示。以FPGA芯片为核心处理平台,外设包括RS422串口收发器(ADM2490)、A/D模数转换器(ADS8358)、D/A处理芯片(AD5360)、IO电平转换芯片等。由系统提供或自行设计的IP核实现对外设接口的控制,只需将信号引出连接相应的转换芯片,烧写存放嵌入式系统内核和文件系统的FLASH选择XCF32PVOG48C芯片。

图6 硬件系统结构图Fig. 6 Configuration of hardware system
通过该电路设计,数字处理机的体积减少到之前的四分之一,伺服控制系统也相应减少了一块控制电路板,并减少了数字处理机与伺服控制系统之间的信息传送,提高了激光半主动导引头硬件集成度。
3.2 软件开发
数字处理机的软件开发工作包括驱动软件和顶层应用软件,设计示意图如图7。驱动软件通过IP核完成各种硬件包括处理器、定时器、中断控制器、串口通讯等驱动程序的配置,并连接应用软件接口。顶层应用软件则由Xilinx公司提供的嵌入式开发工具硬件平台开发工具(Platform Studio)实现,经编译产生硬件比特流文件。顶层应用软件通过DSP处理核完成导引头工作时序控制以及信息交互等,通过PLB(Processor Local Bus)总线标准访问多个外设IP核。开发工具为嵌入式软件平台(Platform Studio SDK),采用C语言编程。
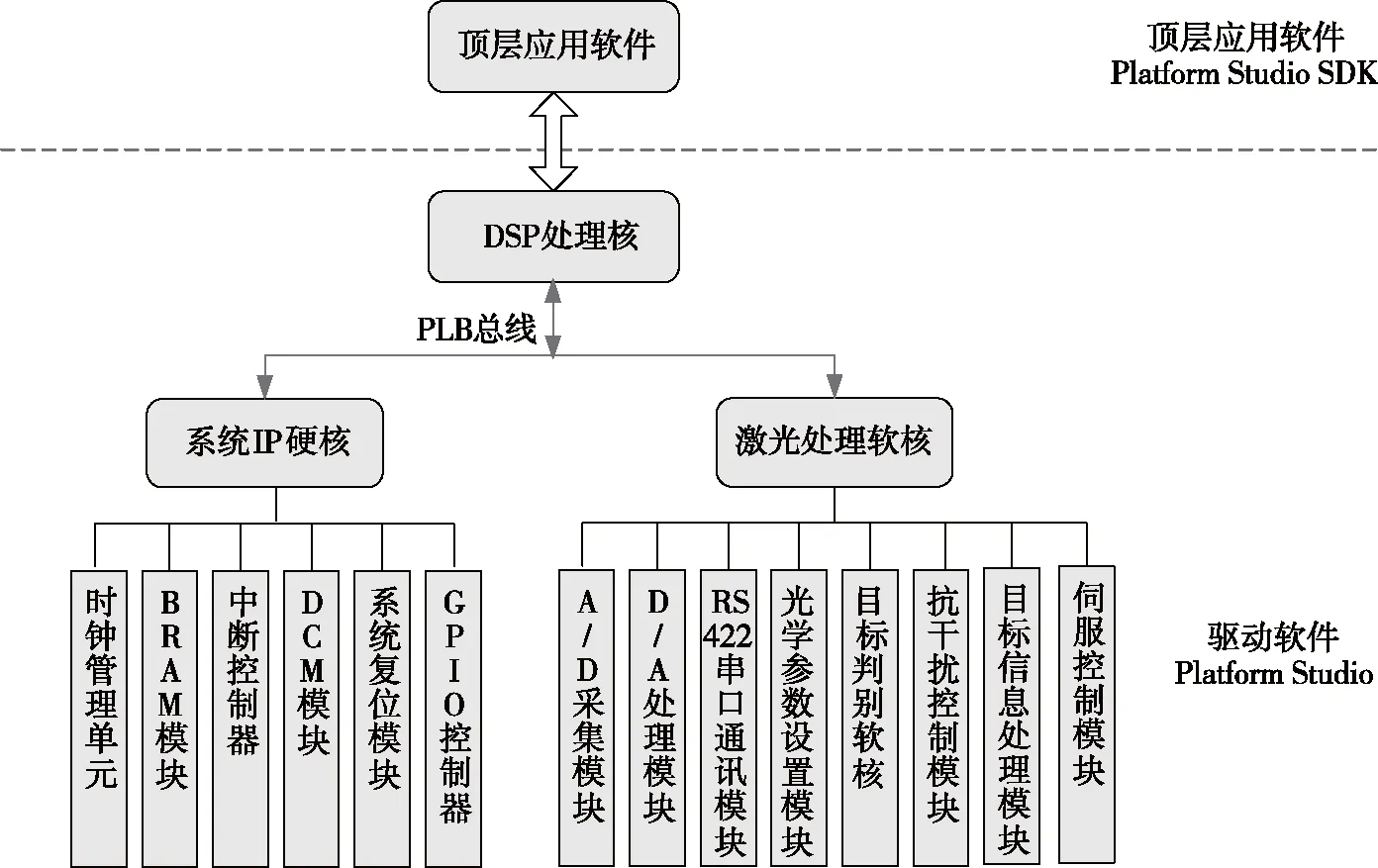
图7 数字处理机软件设计示意图Fig. 7 Schematic diagram of digital processor software design
IP核是具有知识产权核的集成电路芯核总称,可直接实现用户所需的所有功能,减少对外部设备编写驱动程序的工作,主要包括软核、固核、硬核,其中最常用的是软核和硬核这两类IP[5]。
驱动软件采用了多种IP核,其中,硬核资源包括DSP处理核、CDM时钟管理单元、BRAM模块、中断控制器、系统复位模块、GPIO控制器等,由系统提供,不可修改。软核根据选择的器件接口协议或者激光半主动导引头的功能要求设计,包括A/D采集模块、D/A处理模块、RS422串口通讯模块、光学参数设置软核、目标判别软核、抗干扰控制模块、目标信息处理模块以及伺服控制模块。IP软核通过ISE Foundation软件开发,采用VHDL或Verilog语言编程,具有很高的移植性,可灵活应用于其它激光半主动导引头。
顶层应用软件依据导引头的工作流程设计,软件流程图如图8所示。

图8 数字处理机软件设计流程图Fig. 8 Flow diagram of digital processor software design
4 试验情况分析
通过工程研制,将该数字处理机装入激光半主动导引头进行整机测试,试验表明该数字处理机可实现对激光目标的检测判别与跟踪,同时可完成对伺服控制系统的控制,导引头输出角度精度、隔离度、跟踪时常数等各项指标均满足设计要求。对导引头输入模拟实际靶试的激光目标回波信号,对导引头的动态跟踪性能进行仿真验证,仿真过程中跟踪正常,无目标丢失,数字处理机提取的视线角速度如图9和图10所示。
其中,图9为俯仰方向视线角速度示意图,图10为偏航方向视线角速度示意图,横坐标为仿真时间,纵坐标为视线角速度。仿真过程中,数字处理机提取的视线角速度随着激光能量逐渐增强而减小,精度满足设计要求,可用于激光半主动导引头。

图9 激光导引头俯仰视线角速度Fig.9 Elevation LOS angular velocity of laser seeker

图10 激光导引头偏航视线角速度Fig.10 Yaw LOS angular velocity of laser seeker
5 结束语
本文阐述了激光半主动导引头数字处理机的原理与功能,提出了一种激光半主动导引头集成数字处理机及伺服系统控制功能的高集成数字处理平台。运用软件模块化设计思想,采用多种IP软核,使软件具有良好的移植性。试验证明,该硬件电路满足设计要求,实现了激光半主动导引头小型化的目的,性能可靠,软件控制灵活,具有广阔的应用前景。
