基于PowerPC平台的某随动控制系统的设计研究
2018-07-11李爱萍范文晶丁小芩鲁勇军
李爱萍,范文晶,丁小芩,鲁勇军
(上海机电工程研究所,上海,201109)
0 引 言
随动系统又称伺服系统,是一门机械、电力电子、控制和信息技术相结合的交叉学科。它是使物体的位置、方位、状态等输出被控量能够跟随输入目标的任意变化而变化的自动控制系统,其主要任务是按控制命令的要求对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制更加灵活方便[1,2]。
具体到导弹发射装置而言,随动系统是指计算机按照上级系统的指令控制导弹发射装置在方位及高低两个方向转动,使其实时指向目标位置,而且系统的静态及动态跟踪误差满足上级系统的要求。本文基于PowerPC计算机平台,设计了某导弹发射装置的随动控制系统,采用基于经典PID的复合智能控制方法,并融入了粒子群算法。验证表明,最终的随动控制系统运行平稳,静态及动态跟踪误差满足武器系统要求,并实现了参数自整定功能。
1 随动系统总体设计
随动系统由PowerPC控制器、信号控制单元、传动系统、电机、位置采集传感器及控制软件组成,控制对象为导弹发射装置。随动系统总体框图见图1。
PowerPC控制器是随动系统的控制中心,控制器中的处理器作为控制软件的运行载体。控制器通过CAN通讯接口接收上级系统的指令信息和发射装置的位置信息,对控制量进行计算,并对随动系统各项功能进行调度处理;位置传感器通过CAN通讯接口与控制器进行通讯,传输发射装置的位置信息;随动控制软件中采用了智能控制算法,通过控制器进行软件运行及控制量计算后,经由D/A转换板将控制信号转换成模拟量控制电机进行转动;信号检测单元则用于对发射装置的限位等安全信号进行采集,为控制软件的安全性设计提供数据来源。本文将重点介绍PowerPC控制器及控制软件的设计。
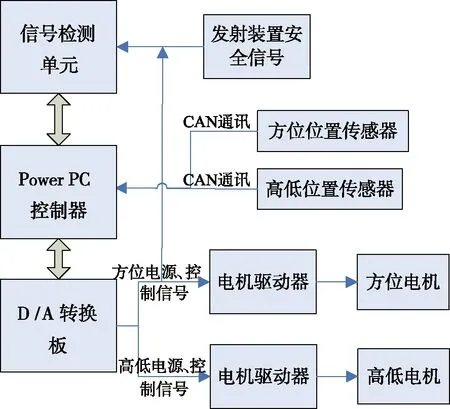
图1 随动系统总体框图Fig.1 Servo-system general diagram
2 PowerPC控制器设计
为了促进软件架构思想在随动控制软件中的应用,需要选用一款可以运行操作系统的处理器。兼顾到成本及性能,选择了PowerPC处理器。PowerPC处理器是一种RISC架构的CPU,它具有优异的性能、较低的能量损耗以及较低的散热量,因此在嵌入式系统的设计中表现优异。
该系统中选用了飞思卡尔半导体公司的通用多核处理器MPC5121e。该处理器运用了先进的90 nm低功耗CMOS技术,主频400 MHz,提供760 MIPS用户可编程的32位RISC核心,内存为512 MB的SDRAM,并提供了片上128 kB SRAM,集成有四个CAN通讯模块和USB接口,+5 V电源供电,且功耗小于1.5 W。
另外,在MPC5121e处理器的外围扩展了16 MB FLASH、128 kB NVRAM和板载2 GB单芯片电子盘。128 kB的NVRAM可以在系统掉电的瞬间将重要的数据及时保存到自身的FLASH空间;16 MB FLASH可以用于保存应用程序和用户的重要数据,可通过硬件保护措施防止FLASH上的数据被破坏。另外提供大容量的电子盘来备份和保存用户的数据信息,各种存储方式的设置为系统运行过程中的数据存储提供了多种选择。
具体到本系统而言,NVRAM用于存储配置文件中的重要信息,如控制算法中的各项控制参数、角编码器的初始值及限位角度等;FLASH用于存储控制程序;2 GB的电子盘用于存储随动系统与上级系统之间的通讯报文。PowerPC处理器系统组成如图2所示。
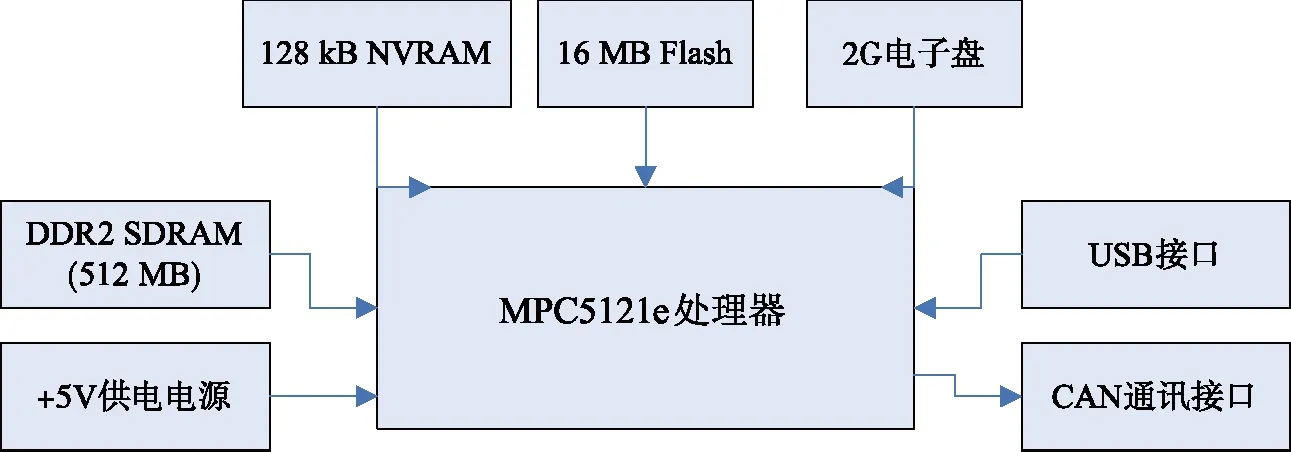
图2 PowerPC处理器Fig.2 PowerPC processor
3 控制算法建模及仿真
在控制系统的硬件组成确认之后,对控制系统进行了仿真模型的搭建。选用基于经典PID的复合智能控制方法,并对随动控制算法进行了仿真。
3.1 初步仿真结果
根据随动系统中选择的电机及驱动器参数建立了一套仿真模型结构,本文主要介绍方位系统的仿真。仿真采用Matlab软件完成,基本仿真结构图如图3所示。其中电机模型选用交流电机模型,并建立了位置闭环控制结构。采用PID加前馈的控制算法完成系统的仿真调试[3-5]。
在仿真结构图完成后,对运行90°调转指令、等速信号及正弦信号进行了初步仿真,并得到了具体的误差曲线。由于选择的电机未限速,因此系统调转90°在2.3 s左右即完成。
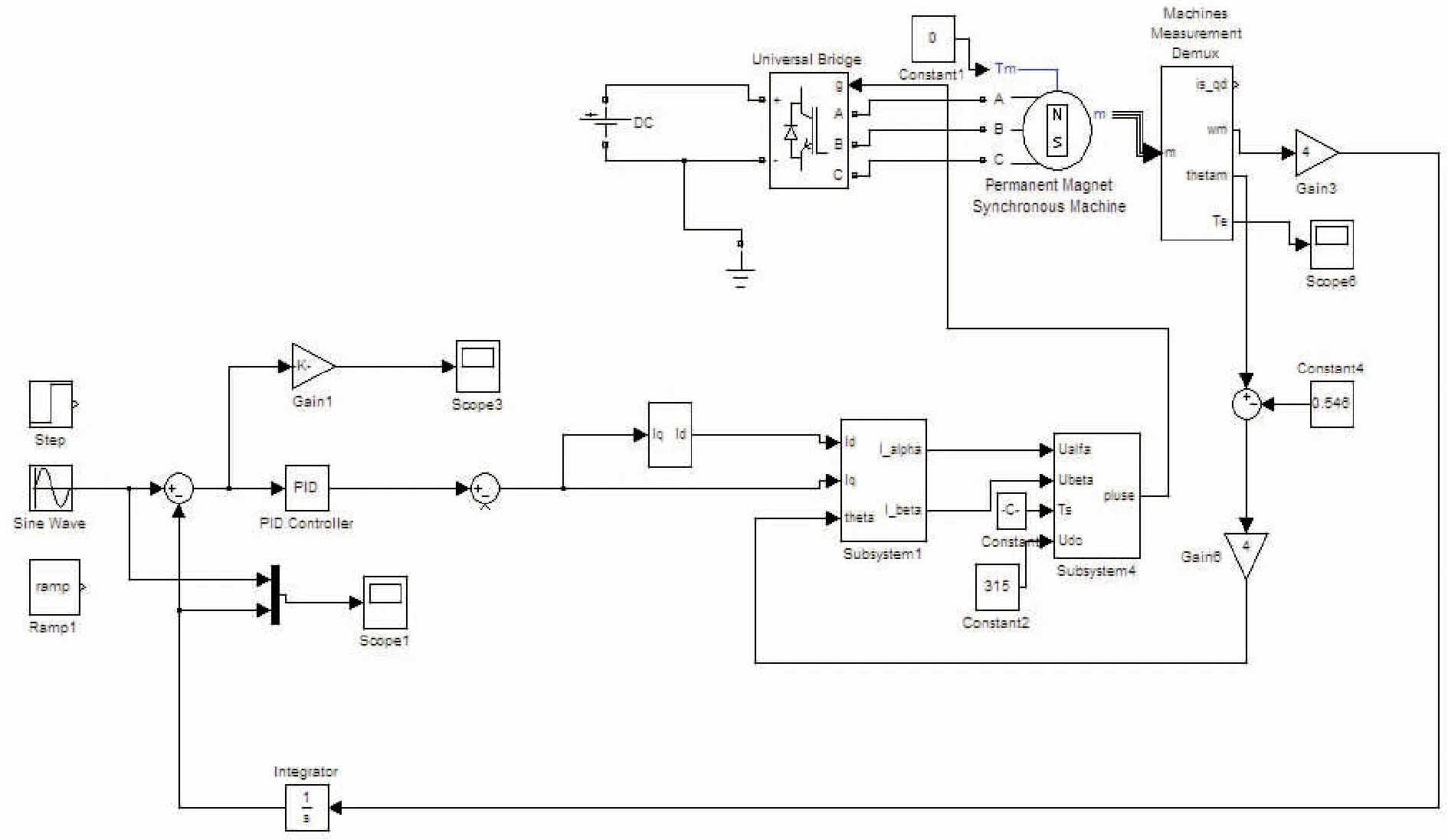
图3 Matlab搭建的随动系统仿真结构图Fig.3 Servo-system simulation structure chart by Matlab
3.2 位置环控制整定过程
在初步仿真完成后,基于工程法对位置环控制器中的控制参量进行了设计,并将设计结果作为待整定参量的初始值。参数确定的主体思想是先将位置环校正为临界阻尼或接近临界阻尼的二阶系统,从而确定
出位置环的比例增益值。然后引入前馈补偿,调节参数使得系统的跟踪误差趋近于零,从而确定前馈补偿量。
将整定出来的控制参数设置到控制器中,使系统分别跟踪阶跃信号、等速信号以及正弦信号,仍采用之前的方位系统仿真模型,在Matlab中的仿真结果如图4—图6所示。
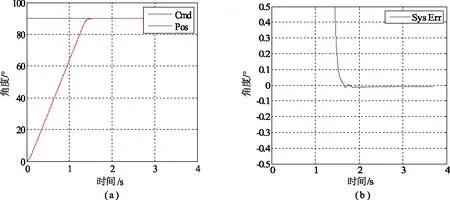
图4 方位阶跃响应仿真结果Fig.4 Step simulation response for azimuth
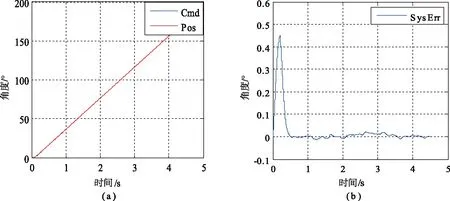
图5 等速响应仿真结果Fig.5 Constant speed tracking simulation response for azimuth
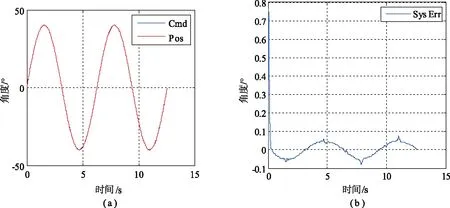
图6 正弦响应仿真结果Fig.6 Sine tracking simulation response for azimuth
图4(a)为系统在跟踪幅值为90°阶跃信号时的响应曲线,图4(b)为跟踪误差曲线。通过图4(b)可知系统的响应时间在2.3 s时,系统静态误差为0.03°。跟踪效果满足系统对阶跃响应时间不大于3 s、静态误差不大于0.05°的指标要求。由于图幅大小有限,图4(a)中的指令与响应曲线几乎重叠在一起,具体误差值参见图4(b)。
由图5可知,系统在跟踪20 (°)/s的等速信号时,系统的跟踪误差也在0.05°以内,满足系统对等速跟踪误差不大于0.15°的指标要求。由于图幅大小有限,图5(a)中的指令与响应曲线几乎重叠在一起,具体误差值参见图5(b)。
由图6可知,系统在响应幅值为40°,周期为6.28 s的正弦信号时,系统的跟踪误差为0.08°,能够满足系统对正弦跟踪误差不大于0.15°的指标要求。由于图幅大小有限,图6(a)中的指令与响应曲线几乎重叠在一起,具体误差值参见图6(b)。
3.3 参数自整定功能的实现
为了确保当目标以不同的角速度和角加速度进入时,或由于导弹发射前后转塔转动惯量改变的条件下,可自适应调整随动系统控制参数,减少随动系统的动态滞后,提高随动系统的跟踪精度,随动控制算法中融入了粒子群算法,以提高随动系统的参数自适应能力。
标准粒子群算法可以理解成鸟群寻找食物的过程,每一只鸟是一个粒子,也代表所要求解问题的可能解。每只鸟知道当前离食物最近的鸟与食物间的距离,然后根据适应度函数求得自己的适应度值,并根据速度和位置更新公式不停地更新自己的位置,追随当前离食物最近的鸟。经过一段时间的寻找,鸟群聚成一群并找到食物,即求得问题的解。
以标准粒子群算法作为控制算法的理论基础,通过多次运行阶跃、等速及正弦曲线,在原有PID控制参数的基础上进行多极值优化,最终取得更接近理论极值的最优结果。
4 随动控制软件设计
在随动控制算法确定之后,开展了随动控制软件的设计工作,随动控制软件的工作流程如图7所示。其工作过程是通过与上位机的通讯,接收上位机的指令及目标位置信息,实时读取角度位置传感器的数据,实现对不同任务类型的控制和目标指向数据的平滑处理,并实时向上位机返回工作状态和参数。同时,根据目标参数和发射装置当前位置值计算得到电机控制量并通过D/A板将该控制量转换成模拟电压后实现对电机驱动器的控制,从而实现随动控制系统对目标的自动跟踪。
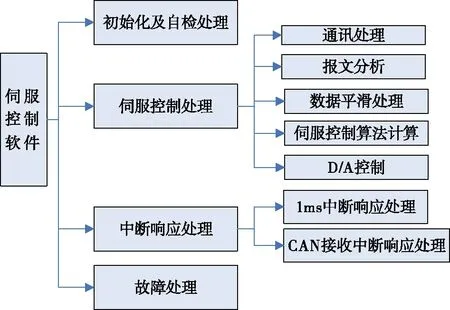
图7 随动控制软件流程图Fig.7 Servo control software flow diagram
具体工作流程为:
1) 初始化及自检处理模块:包括PowerPC控制器相关存储器、定时器、CAN通讯口及相关寄存器的初始化。
2) 中断响应处理:在中断响应程序中接收上位机及位置传感器的CAN通讯数据。
3) 随动控制处理:对接收到的报文进行拉格朗日数据滤波处理。在算法设计时采用复合智能控制方法,并采用切比雪夫滤波器对发射系统姿态信息进行滤波,最大程度上抑制了各种非线性因素对系统的影响,具有较强的鲁棒性。
5 随动系统控制效果
经过前期的调试,随动系统的运行效果最终满足了系统的要求,其静态误差小于0.05°,动态跟踪误差小于0.15°,运行效果理想。图8—图10是随动系统在进行正弦运动、阶跃运动及等速运动时的波形效果图。
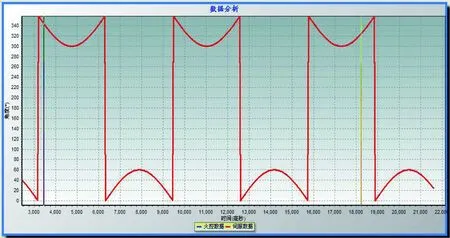
图8 方位方向正弦运行波形图Fig.8 Sine tracking curve for azimuth
图9 方位方向阶跃运动波形图Fig.9 Step curve for azimuth
图10 等速运动波形图Fig.10 Constant speed tracking curve for azimuth
参数自整定算法设计完成之后,在随动系统模拟缩比台上进行了算法的验证。通过调试,最终在3次迭代之后可以成功获取PID及前馈等各项控制参数。
随动控制软件采用新获取到的各项参数,方位方向随动跟踪误差在0.1°以内,高低方向跟踪误差在0.08°以内,满足武器系统动态跟踪误差不大于0.15°的要求。
6 结束语
本文对一型基于PowerPC平台的随动系统的硬件组成、随动控制算法仿真、参数自整定功能的实现、软件研制流程及控制效果进行了详细的介绍,最终的运行效果表明该系统中采用的硬件控制电路及复合智能控制算法是有效的,该文对其他随动系统的设计研制具有一定的参考和借鉴意义。
