整周跳变的探测与修复──GNSS动态载波相位测量的数据处理方法之四
2018-07-10刘基余陈小明
刘基余,陈小明
(武汉大学测绘学院,武汉 430079)
GNSS载波相位测量,只能测量载波滯后相位1周以内的小数部分,不能测量载波滯后相位的整周数(N0);其后的载波滯后相位整周数变化值(称之为始后周数),是通过多普勒积分由电子计数器累计读得的。由于GNSS信号接收机自身故障或者GNSS信号意外中断,导致载波锁相环路的短暂失锁,而引起多普勒计数的短暂中断;当载波锁相环路重新锁定后,多普勒计数又重新开始,以致造成载波滯后相位整周数变化值(始后周数)的不连续计数;这种多普勒计数的中断现象,叫做整周跳变,简称之为周跳(Cycle Slip)。
当GNSS载波相位观测值没有发生周跳时,卫 星一次通过的载波滯后相位整周数是连续的,各时元(时元)的观测值都会含有一个共同的整周未知数,即时元t1的整周模糊度N0,当发生周跳时,其后所有的载波相位观测值都会含有一个偏差Δ,该偏差就是中断期间所丢失的整周计数,即周跳后的载波相位观测中含有未知数N0+Δ。
所谓周跳的探测就是利用观测的信息来发现周跳。在探测出周跳后,利用观测信息来估计丢失的周数Δ,从而修正周跳后的载波相位观测值,称之为周跳的修复。在探测出周跳之后,也可将N0+Δ视为周跳后的整周模糊度而利用平差的原理解求出这个未知参数,这是一个整周模糊度的求解问题。
静态定位中,由于接收机静止不动,周跳的探测与修复问题已得到了很好的解决。在动态环境下,由于动态接收机在不断地运动中,周跳的探测与修复比静态定位要困难得多。
由于GPS信号接收机能提供多种观测信息,利用这些观测信息本身的相互关系(无需轨道信息),可以对周跳进行探测和修复,目前主要有下列方法:
利用载波相位及其变化率的多项式拟合来探测、修复周跳(多项式拟合法);利用伪距和载波相位观测值组合来探测、修复周跳(伪距/载相组合法);利用双频载波相位组合观测值来探测、修复周跳(电离层残差法)。
1 多项式拟合法
从载波相位测量的特性可知,周跳前后,载波相位不再是连续函数,但其变化率则是连续函数,且为载波相位的严格一阶导数。利用载波相位变化率、载波相位观测值可对周跳进行探测和修复。
加拿大学者Canon于1989年建议采用下模型来探测周跳:

式中,是载波相位观测值;是载波相位变化率。
中国陈小明博士于1993对上述模型进行适当扩充,而可得到多项式拟合法。它基于周跳前后载波相位观测值符合如下多项式模型:

式中,φ为以周表示的载波相位观测值;ΔN为周跳数;a0,a1,a2,a3为待求系数。载波相位变化率是载波相位的一阶导数,故载波相位变化率可写为

现选取5个时元的载波相位观测值及其变化率:

并假设前4个时元的载波相位观测值(φ1,φ2,φ3,φ4)没有周跳,而用它们来探测和修复第五个时元的载波相位观测值φ5的周跳;依此列立如下误差方程:


根据最小二乘原理可解得

若解得的|ΔN|>ε(ε为给定限值),则说明第五个时元的载波相位观测值φ5存在周跳,其周跳估值为ΔN。这种方法假定在给定区间内载波相位变化率为匀加速变化,在实际动态定位中,若目标动态变化较大,则会产生较大的模型误差。现据1996年3月18日在海南省海口市所作的机载GPS测量成果,对上述多项式拟合进行解算实践。该次机载GPS动态载波相位测量采用1秒数据采样率,依此用多项式拟合法探测25号卫星L1载波相位测量的周跳;图1、图2、图3分别表示飞机处于静止待飞、常规直线飞行和加速起飞段的周跳探测结果(数据本身没有周跳)。图2、图3中黑线为飞机速度。从图1可见,对于GPS静态数据,多项式拟合法所得到的ΔN均小于0.1周,故可探测出GPS静态定位的所有周跳。图2的结果表明,当载体作近似匀速直线运动时,多项式拟合法可以探测出大于2周的周跳。图3的结果表明,由于飞机加速起飞时,特别是离地后,动态变化不稳定,ΔN计算值噪声较大,但对于大部分时元ΔN的计算值小于2周,个别时元虽然大于2周,但小于5周。因而可选取|ΔN|>5为判断是否有周跳的标准。该方法的优点在于可分别对L1及L2非差载波相位观测值或双频组合观测值进行周跳探测。但该方法需用到载波相位变化率观测量,而不适用于不能提供载波相位变化率观测值的GPS信号接收机。
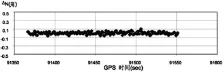
图1 多项式拟合法能修复出GPS静态定位的所有周跳

图2 多项式拟合法能修复出准匀速直线运动的GPS动态定位的大于2周的周跳,其精度损失不会大于0.5m
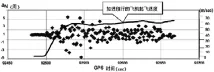
图3 多项式拟合法能修复出加速航行的GPS动态定位的5周以上的周跳,其精度损失不会大于1.2m
2 电离层残差法
1986年美国学者Goad提出用双频载波相位测量的电离层残差,探测和修复周跳,称之为电离层残差法,它主要考察不同时元间电离层残差的变化。若不考虑量测噪声和多路径效应,同一时元的双频载波相位测量之差则为:

将式(6)两端同除以λ1,则有
Δion(t)表示用L1波长的双频载波相位测量电离层延迟的差值,称之为电离层残差。若不存在周跳,时元之间的Φgf(t)/λ1之差为 :

式中,ΔΦgf为时元间电离层残差的变化值。当电离层比较稳定、采样间隔较短(几秒钟),电离层延迟的变化为亚厘米级。图4~7均为1996年3月在海南省所作的机载GPS动态载波相位测量成果,其数据采样率是一秒钟,且没有发生载波相位测量的整周跳变;图4和图5分别地面基准接收机和机载GPS信号接收机观测PRN29号卫星的电离层残差数据(用L1波长表示,单位为周),图中虚线为卫星的天顶距。图5和图7分别是地面基准接收机和机载GPS信号接收机观测PRN29号卫星的时元间电离层残差的变化。由图5可知,对于静态观测的GPS信号接收机时元间电离层残差变化较小,其值均小于0.005周。而图7表明,对于机载GPS信号接收机,由于多路径效应和量测误差的影响,电离层残差的变化较大,但其值都小于0.05周。因而在电离层较稳定时,短时间内载波相位测量电离层残差的变化很小。若相邻两时元间电离层残差发生突变,则说明L1或L2的载波相位观测值可能存在周跳。若设L1,L2的周跳分别为ΔN1,ΔN2,则有

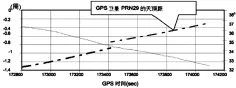
图4 地面基准站1秒数据更新率GPS卫星PRN29的电离层双频观测值的残差
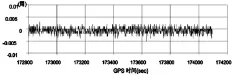
图5 地面基准站1秒数据更新率GPS卫星PRN29的电离层双频观测值时元之间电离层双频观测值残差的变化,其变化值均小于0.005周

图6 机载GPS信号接收机1秒数据更新率GPS卫星PRN29的电离层双频观测值的残差
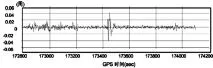
图7 机载GPS信号接收机1秒数据更新率GPS卫星PRN29的电离层双频观测值时元之间电离层双频观测值残差的变化,其变化值均小于0.05周
此时,ΔΦgf是L1,L2周跳的线性组合;显然,如果L1,L2的周跳使 [(77/60)ΔN2-ΔN1]等于零或接近于零,从而使时元间电离层残差观测值的变化ΔΦgf很小,则用该法无法探测出周跳;即,当60ΔN1=77ΔN2时,有(77/60)ΔN2-ΔN1=0;此 外, 当 ΔN1=±4,ΔN2=±3;ΔN1=±5,ΔN2=±4;ΔN1=±9,ΔN2=±7 ;ΔN1=±14,ΔN2=±11,… 时,(77/60)ΔN2-ΔN1均小于 ±0.15周;特别是当ΔN1=±9,ΔN2=±7时,|(77/60)ΔN2-ΔN1|仅为0.0167周,几乎和测量噪声相当(见表1)。根据上述机载GPS测量成果,选取|ΔΦgf|>0.05周为探测周跳的标准,对于大部分周跳均可探测出来;但对一些特殊的周跳组合,如ΔN1=77,ΔN2=60;ΔN1=9,ΔN2=7等,则难以探测出周跳。尽管如此,电离层残差法仍然是一种极好的双频周跳探测方法;若能联合应用其他周跳探测方法(如多项或拟合法),将周跳修复至7周以内,电离层残差法,则可正确探测出所有周跳。

表1 双频周跳探测的电离层残差法
3 伪距/载相组合法
从GPS卫星测量误差特性可知,除电离层延迟、多路径效应、量测误差之外,其它误差源对伪距和载波相位测量的影响是相同的,故可用伪距和载波相位观测值的组合来探测和修复周跳。
单频伪距和载波相位测量的观测方程可表述如下:

式中,R为伪距观测值;φ为载波相位观测值;λ为载波波长;N为载波相位整周模糊度;dIR,dIφ分别是伪距和载波相位测量的电离层效应偏差;dmR,dmφ分别为伪距和载波相位测量的多路径效应偏差;εR,εφ分别为伪距和载波相位的量测噪声。将式(10)和式(11)相减可以得到:

将式(12)在时元间相减,由于时元间电离层延迟和多路径效应变化较小时,可以得到周跳的估值:

式(13)可用于单频、双频非差数据。其估计精度取决于电离层延迟和多路径效应在时元之间的变化,以及伪距和载波相位测量的量测噪声、载波波长λ的大小。在相同的观测条件下,波长越长,则对周跳的估计越精确。基于上述思想中国韩绍伟博士于1995 年提出利用双频组合测值φ1,-1,φ-7,9来探测和修复周跳的方法(此处,φ1,-1表示其测距有效波长为86.2cm,φ-7,9表示其测距有效波长为1465.3cm)。每时元双频组合观测值的整周模糊度可用下式来估计:
上式中的R可选择为L1或L2的伪距R1或R2,也可选择R1,R2的平均值,根据不同接收机类型以及可用的伪距观测值,应选择量测噪声较小的伪距观测值作为R代入式中计算。若精确已知式(14)中的电离层延迟,则波长越长,N确定精度越高。
每一时元的Ni,j均可用(14)来估计,当时元间电离层延迟等变化较小时,时元间周跳可用式(15)估计。

根据 N1,-1,N-7,9的定义有以下关系 :如果 N1,-1为奇数→N-7,9为奇数;如果 N1,-1为偶数→ N-7,9为偶数。这一奇偶关系表明:当其中一个整周模糊度确定后,则另一个的有效波长变为原波长的两倍因而更容易求解,对于周跳也存在同样的关系:
当 ΔN1,-1为奇数→ ΔN-7,9为奇数
当 ΔN1,-1为偶数→ ΔN-7,9为偶数
显然如果求得ΔN1,-1则ΔN-7,9的确定变得更容易,反之亦然。若确定 φ1,-1,φ-7,9的周跳后,则 φ1,φ2周跳可用下式确定 :

图8 机载GPS测量的窄巷探测周跳
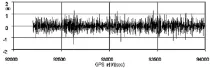
图9 机载GPS测量的宽巷探测周跳

图10 GPS静态测量的窄巷探测周跳

图11 GPS静态测量的宽巷探测周跳

图8~ 图11分别为一次机载 GPS 动态定位中 φ-7,9,φ1,-1周跳探测的结果(GPS信号接收机为Trimble 4000SSE,数据采样率为1秒,卫星号PRN25,R=(R1+R2)/2,无周跳),从图8和图10可见,无论是对静态GPS信号接收机,还是对机载GPS信号接收机,ΔN-7,9的噪声不到0.25周,因此,除ΔN1=9n,外,所有的周跳都可用φ-7,9来探测到,从图9和图11可知;对于静态GPS信号接收机,ΔN1,-1不难确定到2周左右的水平。若设真实跳周数分别ΔN1,ΔN2,且ΔN-7,9,ΔN1,-1的估值分别为,则有

故知,

从式(18)和式(19)可以得到3组ΔN1和ΔN2的估值,即,(ΔN1,ΔN2),(ΔN1+9,ΔN2+7),(ΔN1-9,ΔN2-7)。 对 于 ΔN1和ΔN2分别为9和7的整倍数,且ΔN1,-1估计值精确度为2周时周跳无法探测。
如果进一步提高伪距测量精度,使ΔN1,-1能确定到一周以内的水平,则根据前述奇偶关系,可以惟一确定φ1,φ2的周跳。
4 结束语
综上所述,上列三种方法都可用于单站非差观测值(图1~11中均采用非差观测值)的周跳探测和修复,且可用于在预处理阶段的周跳探测和修复。多项式拟合法主要用于探测L1和L2的周跳,并可将L1的周跳修复到5周的水平;当动态较稳定时,可修复到2周的水平;对于GPS静态测量数据,则可完全修复周跳。电离层残差法,是探测GPS双频测量数据周跳的强有力武器;但存在对一些周跳组合不敏感的问题。伪距/载相组合法,虽也可用于GPS单频测量数据的周跳探测,但精度较低;采用φ1,-1,φ-7,9组合的方法,虽难以惟一确定φ1,φ2的周跳,但很容易将周跳值限制在有限的几个组合内。由于这三种方法分别采用不同的观测量来探测和修复周跳,实际应用中,集三种方法之长,综合使用上述三种方法探测和修复周跳。对于GPS双频测量数据不难在预处理阶段探测和修复绝大部分的周跳;对于GPS单频测量数据,特别是GPS动态测量数据,仅利用站星观测值,难以完全探测出一些小周跳,完全修复则更不可能;因而还需辅以其它信息来探测和修复周跳。
值得一提的是,GNSS卫星信号的现代改进和GNSS信号接收机的现代发展,GNSS载波相位观测值的周跳,不仅发生周跳的情况比较少,而且能够注记发生周跳的时元,便于探测和和修复;但是,需要仔细地处理GNSS观测成果的归一化!■
[1] 刘基余.GPS卫星导航定位原理与方法(第二版).北京:北京科学出版社,2008.6.
[2] Lachapelle,G.,GPS Theory and Applications,University of Calgary,Fall 2000,PP.310.
[3] 刘基余,陈小明,李德仁等.GPS Kinematic Carrier Phase Measurements for Aerial Photogrammetry.ISPRS Journal of Photogrammetry and Remote Sensing,Vol.51,No.5,1996,P.230~242.
