二轴转台间歇式运动实验平台设计
2018-07-09刘伟峰
刘 伟 峰
(杭州电子科技大学 自动化学院,杭州 310018)
0 引 言
二轴转台广泛应用于工业生产诸多部门,例如,工业机器人中普遍采用的多自由度机械臂[1-2]就是基于二轴转台的原理,其中一个轴控制机械臂的方位运行,另一个轴控制机械臂的俯仰运动,可以实现物品抓取、切削[3]。在医用方面,手术机械臂[4-5]可以开展更为精细的手术。卫星导航方面,需要解决转台控制的激光发射,通讯天线指向问题[6-7]。工程吊车和吊塔上的吊装设备,智能车辆平衡也属于典型的二轴转台,需要在水平方位和俯仰两个方向进行控制[8-9]。这类二轴运动对于运动速度和位置的要求,主要受限于工作对象自身的限制,例如,机械臂抓取物品,吊装物品本身硬度、大小、材质等的要求。在视频监控方面,监视平台需要完成大范围的视频检测[10-11]。针对红外、视频摄像成像的要求[12]以及存在的问题,本文设计了一种满足间歇运动的二轴转台。
由于视频传感器的视场较小,对指定的区域视场进行监视时,需要依据某种规则顺序进行扫视。通常,把该视场区域划分为若干个互不相交的矩形网格小区,逐块扫视。转台摄像头扫视时,首先,二轴转台的俯仰角固定在一定的角度,完成水平方位扫视,完成一个水平周期;然后调整俯仰角度,再完成下一次水平方位的往复扫视。由于视频传感器的观测需要积累光源能量,必须达到一定的凝视时间才能稳定成像。因此,这类转台的扫视属于一种间歇式运动模式,即运动-停止-运动-停止,本文重点考虑这种间歇式运动的实验设计问题。
1 二轴转台的基本结构
转台的运动一般包括两部分,水平向的方位运动和竖向的俯仰运动,两组运动彼此独立,由2个不同的执行机构来完成。图1给出的是转台的外观图,其中顶部的半圆形为二轴搜索部分,其模型可以简化为图2所示的方位-俯仰二轴形式。通过两组不同运动的合成,形成总系统的运动。按照运动之间的关系,把转台的运动进行分解为主运动和辅运动:主运动指带动其他部分一起旋转的运动;俯仰运动不仅完成自身的运动,同时还要随主运动旋转,水平向的运动带动俯仰运动,俯仰受水平运动影响,而水平运动不受俯仰影响,水平方向的运动精度影响俯仰运动的精度;因此,水平是主运动,俯仰为辅运动。

图1 转台外观图图2 二轴转台模型简化模型
2 二轴转台的间歇运动与系统设计
2.1 方位与俯仰运动的合成与分解
以俯仰部分A(见图2)点为参考点,分析其运动轨迹,由于水平运动和俯仰运动都是独立的。因此,在时间T内,转台水平和俯仰运动的角度可以用如下的参数方程描述:
(1)
式中:ωθ(t)、ωφ(t)分别为水平轴、俯仰轴运动的角速度函数。通过方程组消去时间t,就可以获得θ、φ平面内运动轨迹方程。为分析方便,假设水平和俯仰角速度为常数ωθ、ωφ,俯仰运动在[-π/2,π/2]内以角速度ωφ做匀速往复运动。理想间歇式运动曲线如图3所示,其中运动时间为t2,运动角速度为ω,凝视时间为为t1。
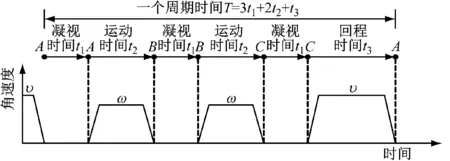
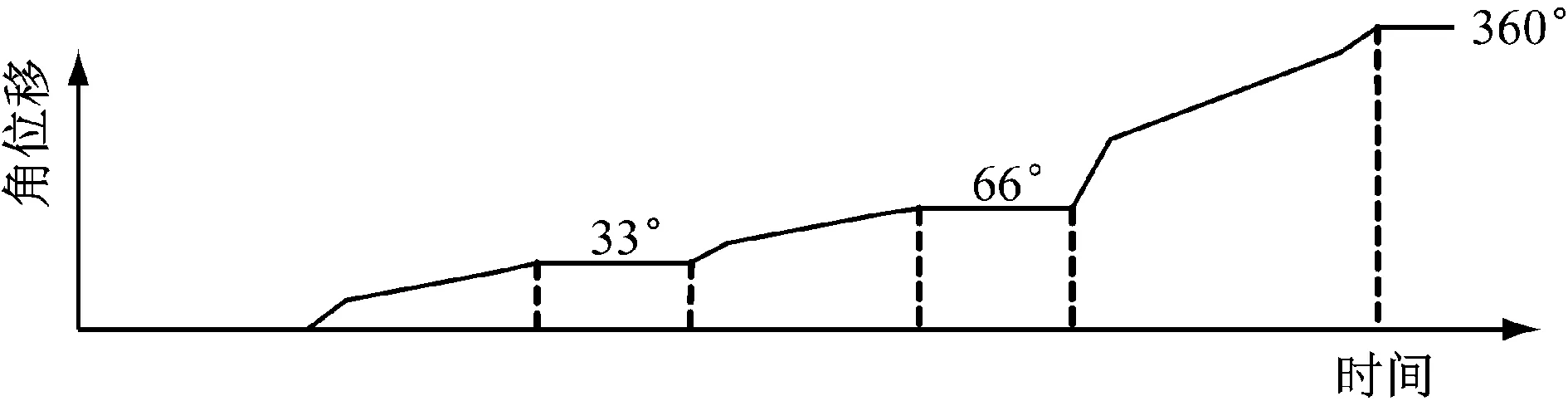
图3 间歇式运动速度与角位移图
2.2 转台伺服电动机基本模型
对于交流伺服电动机,其模型主要包括电流方程、力矩方程、负载力矩三类方程[13-15],电流的大小影响伺服电动机的输出力矩,进一步按照力矩平衡方程分析电动机的转速和角度。电流方程式如下:
(2)
式中:ua是伺服电动机工作电压;Ka属于电压增益;θm是电动机角位移;R是伺服电动机等效电阻。
力矩平衡方程为:
(3)

(4)
设电动机速度环控制器传递函数为GθV(s),则速度环中电动机转矩传递,
(5)
为保证位置和速度的精确性,建立如下的位置、速度双环控制模型,如图4所示。
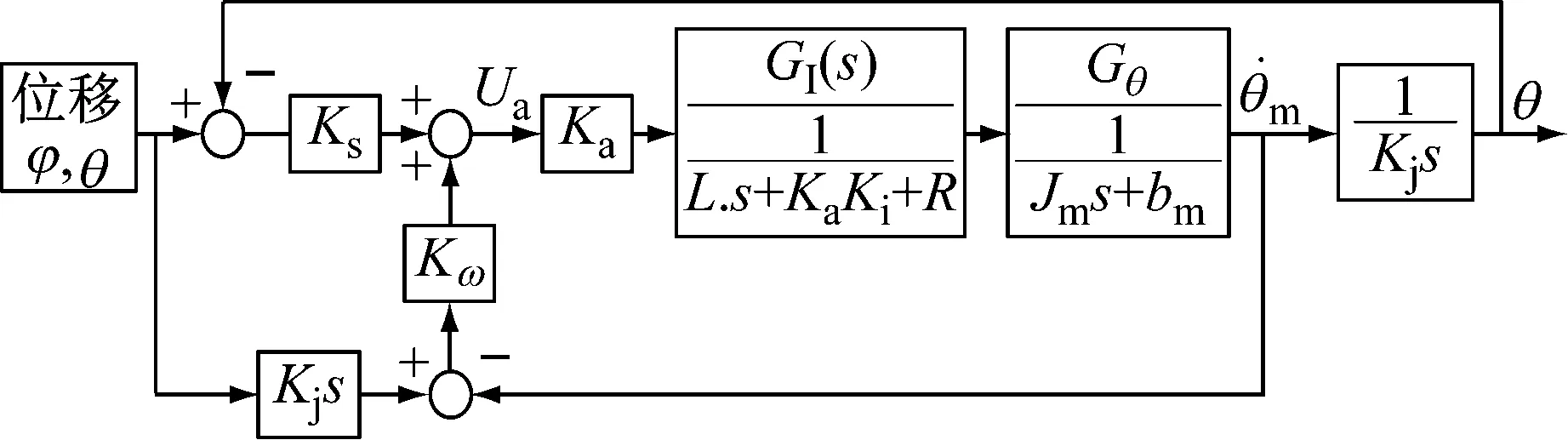
图4 位置、速度双闭环控制框图
2.3 系统结构图
在间歇式运动特点的基础上,设计了整个二轴运动结构框图,如图5所示。运动控制算法与数据处理过程通过一台工控机来实现,即图中的处理机1、处理机2,控制算法产生指令输入到运动控制卡,由控制卡产生伺服电动机的PWM控制信号输入到电动机的伺服放大器中。
3 实验结果分析与对比
3.1 Matlab仿真实验分析
通过建立伺服电动机模型,采用自适应逆控制算法[16]进行二轴转台模型学习,方位运动过程仿真。从转台方位间歇运动跟踪图6(a)可以看出,刚开始时,实际的转速信号误差较大,通过不断地对转台模型进行学习,约200 s后实际间歇运动和给定的间歇式运动模式趋于一致(见图6(b))。

图5 二轴转台运动控制系统结构
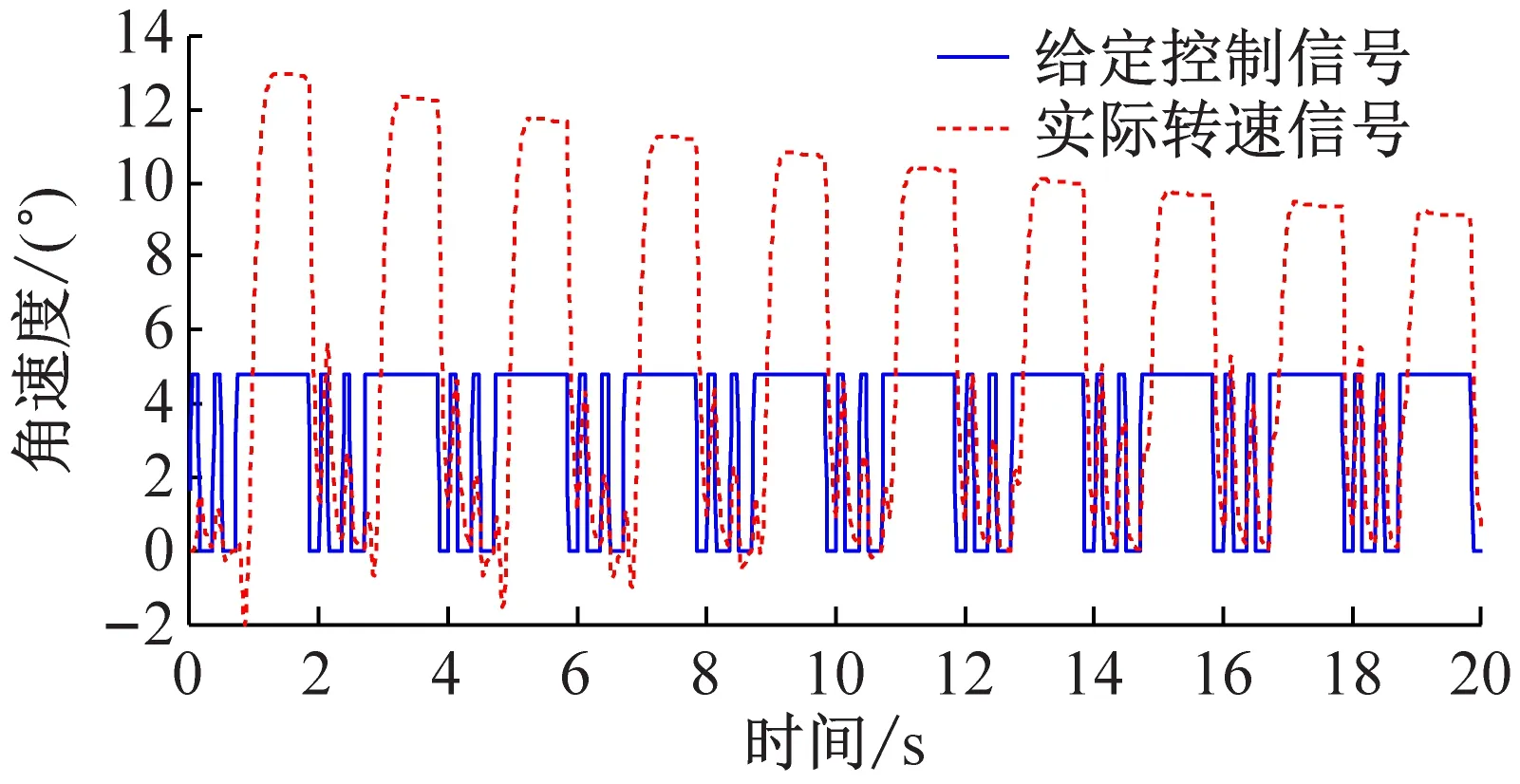
(a) 0~20 s跟踪效果图
图6 间歇式运动仿真实验
3.2 转台系统实验分析
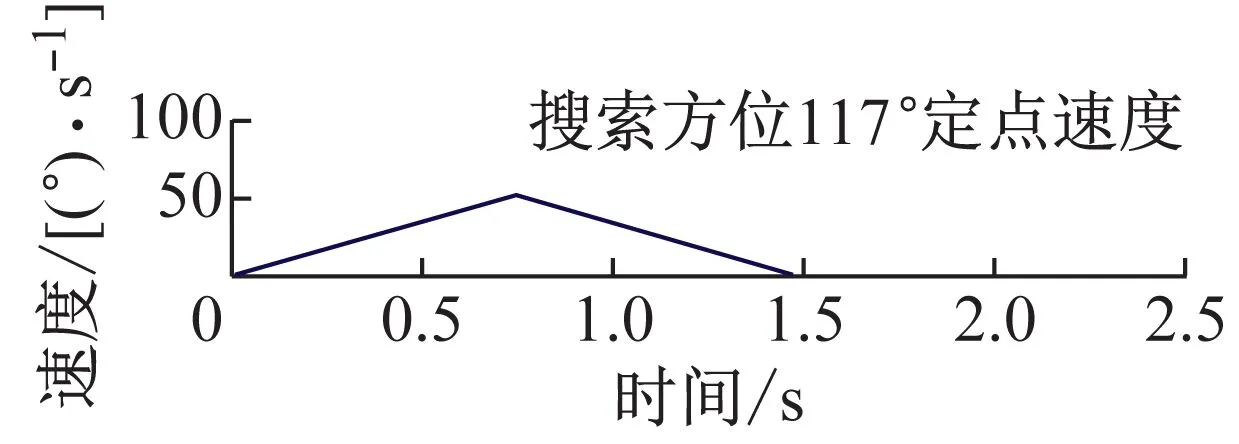
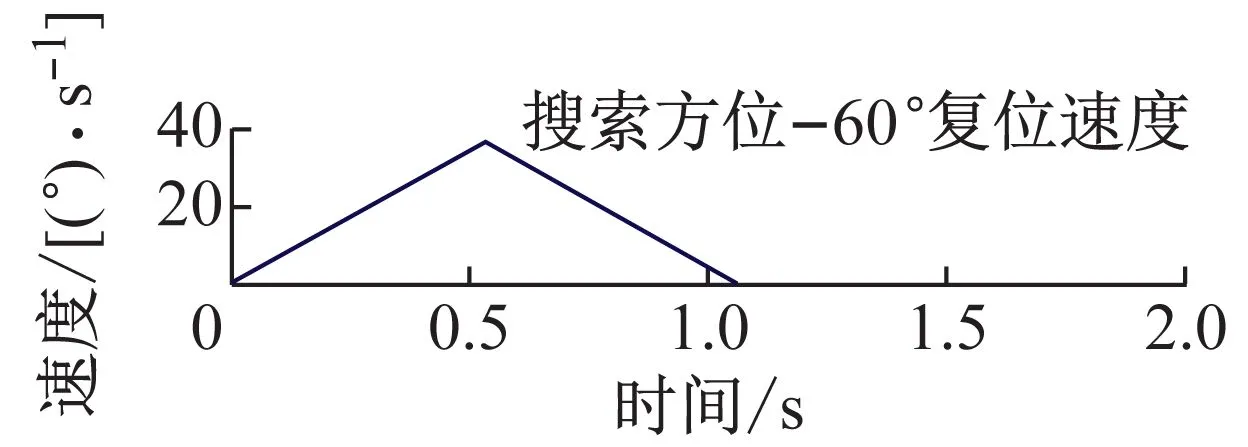
实验设计结构如图7所示,工控机采用ADLink和带有运动控制卡的板卡,经过伺服放大,输入连接到端子板的水平和方位俯仰伺服电动机。图8是依据转台实测数据绘制的定点117°、30°定位、30° 、-30°复位和间歇式运动过程;可以看出,定点位置没有出现超调,比较平稳;复位过程也没有出现震荡过程,这样不仅有助于消除累计误差,并且可以有效减少机械系统的震荡过程。间歇式运动过程可以看作为定点位置指令的持续执行过程,从位置曲线来看,间歇式运动过程也比较平稳,没有出现振荡问题。

图7 二轴转台结构图
4 结 论
本文针对视频传感器扫视的特点,设计了一种基于歇式运动的二轴转台系统,实现水平方向的方位运动和竖向的俯仰运动。考虑到实际转台系统存在偏差,采用自适应逆控制过程进行转台建模。控制算法通过工控机运行实现,所产生的控制信号输入四轴运动控制卡,转换为PWM伺服信号,经过放大器后输入异步电机,最终获得间歇式运动特点。通过特定角度定点定位、不同角度条件下的零点复位、间歇式运动三种模式,实验验证了该二轴转台的可行性和有效性。



参考文献(References):
[1] 韩 峥, 刘华平, 黄文炳,等. 基于Kinect的机械臂目标抓取[J]. 智能系统学报, 2013(2):149-155.
[2] 樊建强, 韩秋兰, 潘旭升. 一种工业四轴机械臂控制系统设计与实现[J]. 工业控制计算机, 2017(2):71-72.
[3] 李粉霞, 李瑞霞. 基于多轴运动控制方法的高速切削复合轨迹研究[J]. 机床与液压, 2016, 44(19):78-81.
[4] 马如奇, 董 为, 杜志江,等. 主被动混合式微创手术机械臂机构设计及灵巧度优化[J]. 机器人, 2013, 35(1):81-89.
[5] 董光友. 腹腔微创手术机器人机械臂的设计及研究[D]. 长春:吉林大学, 2016.
[6] 谭启檐, 高云国, 王小庆. 二轴转台激光发射芯部结构设计与分析[J]. 机械设计与制造, 2010(6):29-31.
[7] 刘剑峰, 韩琦琦, 于思源, 等. 卫星光通信终端二维转台运动参量对天线指向影响研究[J]. 宇航学报, 2007, 28(4):926-931.
[8] 孙建斌. 吊塔三相电动机PLC调速方式的应用[J]. 数字技术与应用, 2015(7):4-5.
[9] 王建林, 徐青菁,姜子痒. 多功能自平衡车控制平台的设计[J]. 实验室研究与探索,2017,35(4):71-73.
[10] 王海涌, 张为玮, 王 卫. 多轴运动控制器在转台控制系统中的应用[J]. 电子技术应用, 2010, 36(3):97-99.
[11] 王 薇. 舰船视频云台增稳的运动补偿研究[D]. 南京:南京林业大学, 2016.
[12] 遆晓光, 靳万鑫, 余 颖. 大运动前景和旋转抖动视频的快速数字稳定[J]. 光学精密工程, 2014, 22(1):177-185.
[13] 阮 毅,陈 伯. 电力拖动自动控制系统-运动控制系统[M].4版.北京:机械工业出版社,2010.
[14] 彭鸿才. 电机原理及拖动[M].北京:机械工业出版社,1996.
[15] 鲁亿方, 郝彦爽. 交-交变频同步电机调速系统的实验仿真研究[J].实验技术与管理,2017,34(5):105-108.
[16] 威德罗. 自适应逆控制[M]. 瓦莱斯,刘树棠,韩崇昭译.西安:西安交通大学出版社, 2000.