浮筏隔振系统的半主动开关控制
2018-07-06,,,,
, , ,,
(浙江工业大学 机械工程学院,浙江 杭州 310014)
浮筏隔振是现代潜艇减振降噪的关键技术之一[1],它可以有效地降低潜艇主机和辅机等系统的机械振动向潜艇基础传递,进而降低潜艇在水中辐射噪声的水平,浮筏隔振技术在美、英、俄等国的先进潜艇及舰船上已大量使用[2-3].但从本质上说,浮筏是一个被动隔振系统,低频隔振能力差依然是其无法克服的弱点,尤其是在系统的共振频率附近.为此,将半主动控制技术应用于浮筏隔振系统,对浮筏隔振系统进行半主动控制,是改善浮筏隔振系统隔振效果的强有力手段.
迄今为止,有关浮筏隔振系统半主动控制研究的国内外文献介绍很少,孙涛等[4]、赵成等[5]和高新科等[6-7]陆续开展了浮筏隔振系统的前馈模糊控制、半主动模糊滑模控制和最优半主动阻尼控制等研究工作,浮筏隔振系统进行半主动控制后,均能够在一定程度上提高浮筏隔振系统的隔振效果.相关工作采用了具有阻尼连续可调的电流变阻尼器,由于可控阻尼器的控制范围较小,以及阻尼特性的非线性,使得实际应用有很大的局限性.开关半主动控制则是通过开关切换可控阻尼器的阻尼状态来实现对系统的半主动控制,控制要求相对简单,控制系统的可靠性高,更重要的是开关可控阻尼器的阻尼特性和控制性能优势明显,十分有利于达到较好的半主动控制效果[8].浙江工业大学王辉[8]、朱雅辉等[9]在这方面进行开展了一些探索性的研究,表明浮筏隔振系统的半主动开关控制,可以有效地抑制浮筏隔振系统基础加速度振幅,相关研究采用了具有良好线性特性和控制性能的开关可控阻尼器.笔者将在此基础上,开展开关控制算法的研究,以期有效地抑制浮筏隔振系统基础加速度响应.
1 浮筏隔振系统的半主动控制动力学模型
浮筏隔振系统的半主动控制动力学模型如图1所示.图1中:F1为机组的激振力;m1,m2,m3分别为机组、筏体和基础的等效质量;c1为机组和筏体间的等效阻尼;c2为筏体和基础间的等效阻尼;c3为基础的等效阻尼;c4为可控阻尼器的阻尼,在on状态(高阻尼)下为con,在off状态(低阻尼)下为coff;k1为机组和筏体间的等效刚度;k2为筏体和基础间的等效刚度;k3为基础的等效刚度;x1,x2,x3分别为机组、筏体和基础的位移响应;v1,v2,v3分别为机组、筏体和基础的速度响应;a1,a2,a3分别为机组、筏体和基础的加速度响应.

图1 浮筏隔振系统的半主动控制动力学模型Fig.1 Semi-active control model of floating raft isolation system
2 浮筏隔振系统半主动开关控制算法
为了实现浮筏隔振系统的半主动开关控制,笔者以减小传递至基础的力为控制原则,提出“筏体位移最小算法”;以激振力做功对浮筏隔振系统输入的能量最小为控制原则,提出“输入能量最小算法”.
2.1 筏体位移最小算法
从减小传递至基础力的角度来考虑,从图1所示的模型来看:筏体传递至基础的力F23表示为
F23=c2(v2-v3)+k2(x2-x3)
(1)
由于实际浮筏隔振系统中c2和x3非常小,则F23可近似表示为
F23≈k2x2
(2)
由式(2)可以看出:传递至基础的力F23的大小主要取决于筏体的位移x2,可以通过抑制筏体的位移x2来减小传递至基础的力.可控阻尼器安装在机组和筏体之间,可以通过改变可控阻尼力的大小尽可能抑制筏体的位移x2,或尽可能避免筏体的位移x2增大.
作用在筏体上的可控阻尼力Fc2可表示为
Fc2=c4(v1-v2)
(3)
按可控阻尼力Fc2的方向和筏体位移x2的方向的不同,浮筏隔振系统的状态可分为4 种,如图2所示,图2中的虚线为筏体的平衡位置.
1) 由图2(a)可知:当可控阻尼力Fc2为正向,且筏体位移x2为正向时,可控阻尼力会使筏体向正向进一步偏离平衡位置,应使可控阻尼器处于off状态,减小可控阻尼力.
2) 由图2(b)可知:当可控阻尼力Fc2为正向,且筏体位移x2为负向时,可控阻尼力会使筏体趋向于平衡位置,应使可控阻尼器处于on状态,增大可控阻尼力.
3) 由图2(c)可知:当可控阻尼力Fc2为负向,且筏体位移x2为正向时,可控阻尼力会使筏体趋向于平衡位置,应使可控阻尼器处于on状态,增大可控阻尼力.
4) 由图2(d)可知:当可控阻尼力Fc2为负向,且筏体位移x2为负向时,可控阻尼力会使筏体向正向进一步偏离平衡位置,应使可控阻尼器处于off状态,减小可控阻尼力.

图2 筏体位移最小算法对应的系统状态Fig.2 System states using the minimum raft displacement algorithm
综上所述,得到筏体位移最小算法的控制规律为
(4)
2.2 输入能量最小算法
从系统总能量变化的角度考虑.当激振力F1的方向和机组速度方向相同时,F1对系统做正功,隔振系统能量会增加;当F1的方向和机组速度方向相反时,F1对系统做负功,隔振系统能量会减少.另外,可控阻尼力是机组和筏体之间的力,总是阻碍机组和筏体之间的相对运动,使机组速度v1和筏体速度v2相互接近,调节可控阻尼力,可以影响机组的速度,进而影响系统的能量交换.
当激振力F1的方向向上时,按照机组速度v1和筏体速度v2的不同,浮筏隔振系统的状态可分为如图3所示的6 种状态.
当激振力的方向与机组运动速度的方向相同时,激振力对系统做正功,系统吸收能量,此时应使|v1|尽可能小;当激振力的方向与机组运动速度的方向相反时,激振力对系统做负功,系统释放能量,此时应使|v1|尽可能大.
1) 系统处于图3(a)状态时,激振力和机组速度的方向相同,机组速度和筏体速度的方向相反,受可控阻尼力影响,|v1|会变小,为了尽可能使|v1|变小,使可控阻尼器处于on状态,增大可控阻尼力.
2) 系统处于图3(b)状态时,激振力和机组速度的方向相同,机组速度和筏体速度的方向相同,且|v1|>|v2|,受可控阻尼力影响,|v1|会变小,为了尽可能使|v1|变小,使可控阻尼器处于on状态,增大可控阻尼力.
3) 系统处于图3(c)状态时,激振力和机组速度的方向相同,机组速度和筏体速度的方向相同,且|v1|<|v2|,受可控阻尼力影响,|v1|会变大,为了尽可能避免|v1|变大,使可控阻尼器处于off状态,减小可控阻尼力.
4) 系统处于图3(d)状态时,激振力和机组速度的方向相反,机组速度和筏体速度的方向相反,受可控阻尼力影响,|v1|会变小,为了尽可能避免|v1|变小,使可控阻尼器处于off状态,减小可控阻尼力.
5) 系统处于图3(e)状态时,激振力和机组速度的方向相反,机组速度和筏体速度的方向相同,且|v1|>|v2|,受可控阻尼力影响,|v1|会变小,为了尽可能避免|v1|变小,使可控阻尼器处于off状态,减小可控阻尼力.
6) 系统处于图3(f)所示状态时,激振力和机组速度的方向相反,机组速度和筏体速度的方向相同,且|v1|<|v2|,受可控阻尼力影响,|v1|会变大,为了尽可能使|v1|变大,使可控阻尼器处于on状态,增大可控阻尼力.

图3 输入能量最小算法对应的系统状态(激振力方向向上)Fig.3 System states using the minimum input energy algorithm(direction of excitation force is upward)
综上所述,得到输入能量最小算法的控制规律为
c4=
(5)
3 浮筏隔振系统半主动开关控制仿真分析
用Matlab软件,建立浮筏隔振系统半主动开关控制的Simulink仿真模型,模型中的参数如表1所示.

表1 浮筏隔振系统半主动控制模型参数Table 1 Parameters of floating raft isolation system semi-active control model
利用仿真模型,分别进行无开关控制(可控阻尼器保持off状态),以及采用筏体位移最小算法和输入能量最小算法进行开关控制,对不同频率激振力(幅值为500 N)作用下的基础加速度响应进行仿真,可以得到激振频率在0.1~20 Hz范围内,浮筏隔振系统基础的加速度响应.基础加速度响应幅值随激振频率变化的曲线如图4所示.
从图4可以看出:筏体位移最小算法控制和输入能量最小算法控制,以及无开关控制的基础加速度响应幅值在共振频率附近均达到最大.筏体位移最小算法和输入能量最小算法控制比无开关控制的浮筏隔振系统基础加速度响应有明显改善.筏体位移最小算法和输入能量最小算法的基础加速度响应幅值,在共振频率附近,较无开关控制显著变小;在共振频率前,较无开关控制略有变大;在共振频率后,较无开关控制变化不大.并且,输入能量最小算法的基础加速度响应幅值在共振频率附近和共振频率前较筏体位移最小算法都有优势.
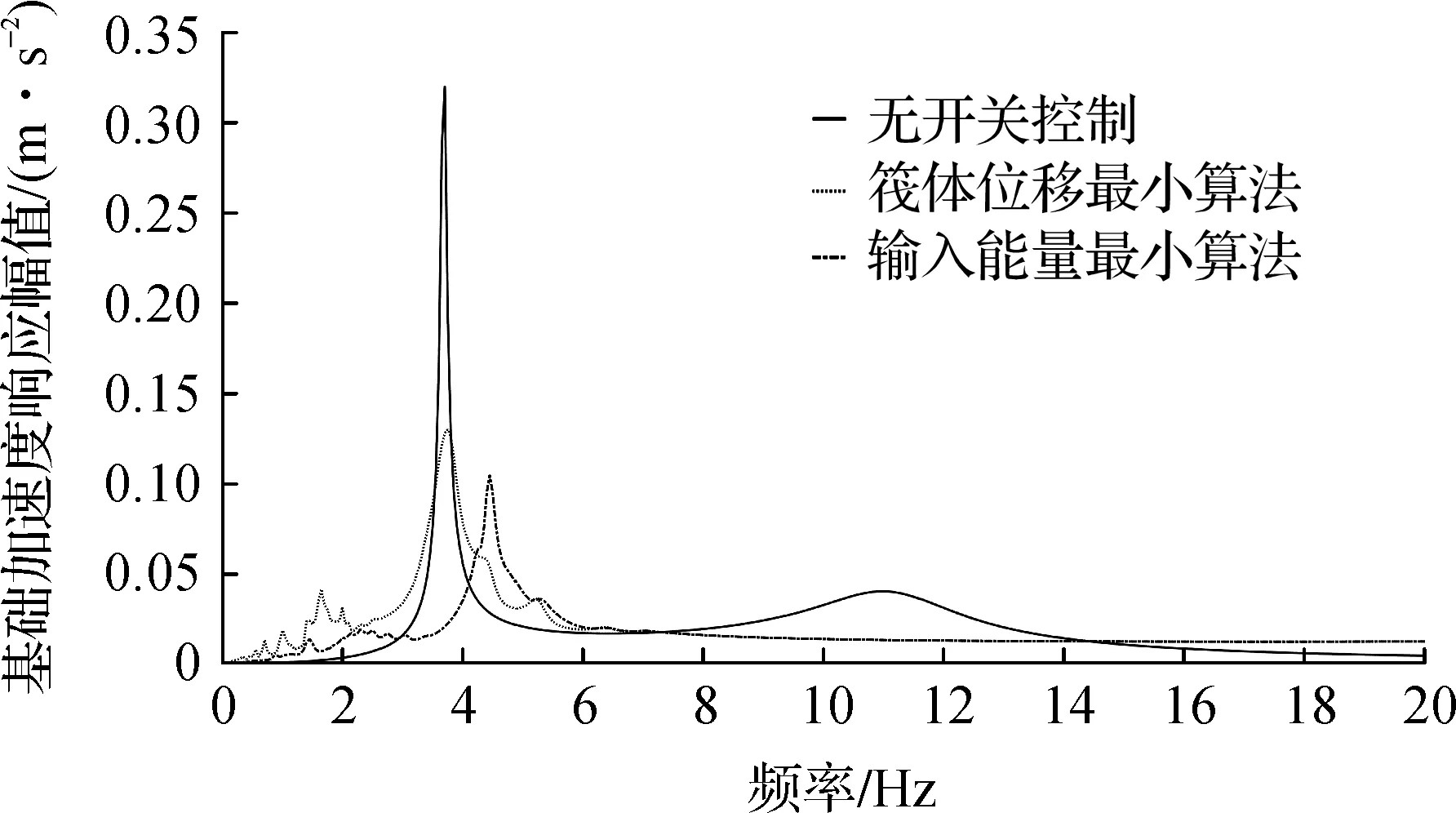
图4 浮筏隔振系统基础加速度响应幅值曲线(仿真)Fig.4 Base acceleration response curve of floating raft isolation system(simulation)
从基础加速度响应幅值曲线的最大值(即共振幅值)来看,无开关控制对应的基础加速度响应幅值的最大值为0.320 m/s2,筏体位移最小算法对应的基础加速度响应幅值的最大值为0.130 m/s2,输入能量最小算法对应的基础加速度响应幅值的最大值为0.105 m/s2.筏体位移最小算法较无开关控制,减小为59%,输入能量最小算法较无开关控制,减小为67%.
4 浮筏隔振系统半主动开关控制试验研究
4.1 试验系统及试验方案
试验系统由3 部分组成:可控浮筏隔振试验台、开关控制系统和隔振效果测试系统,如图5所示.可控浮筏隔振试验台主要包括:电动机驱动的模拟振源、机组、上层隔振弹簧、筏体、下层隔振弹簧、基础、可控阻尼器和变频器等;开关控制系统主要包括:加速度传感器、调理放大器,PCI数据采集卡、工控机和继电器等;隔振效果测试系统主要包括:加速度传感器和信号分析仪等.

图5 浮筏隔振半主动控制试验系统框图Fig.5 Schematic diagram of semi-active control floating raft isolation test system
可控浮筏隔振系统的主要参数与仿真分析模型中的一致,试验系统的加速度传感器的型号为333B30(美国PCB公司),信号分析仪的型号为Siglab 20~42(美国Spectral Dynamic公司).
通过变频器控制电动机的转速,可以改变模拟振源的激振频率,实现不同频率的简谐激振;工控机实时地从PCI数据采集卡获取来自安装在机组上和筏体上的加速度传感器的数据加速度信号,并根据算法给出的控制策略,控制继电器以改变可控阻尼器的状态;安装在可控浮筏隔振试验台基础上的加速度传感器,获取基础的加速度响应信号,并由信号分析仪得到基础加速度响应的幅值.图6是浮筏隔振系统开关半主动控制试验现场.

图6 浮筏隔振系统半主动控制试验现场Fig.6 Switch semi-active control scene of floating raft isolation test system
4.2 试验结果及分析
分别采用筏体位移最小算法和输入能量最小算法对浮筏隔振试验台进行半主动开关控制试验,以及无开关控制试验,试验中激励频率变化范围为1.5~13 Hz.试验得到的浮筏隔振系统半主动控制的基础加速度响应,其幅值随激振频率变化的曲线如图7所示.
从图7可以看出:筏体位移最小算法和输入能量最小算法控制,以及无开关控制三者的基础加速度响应幅值在共振频率附近均达到最大.三种控制策略下,基础加速度响应幅值的主要差异在共振频率附近,在共振频率前后的区别很小.在共振频率附近,筏体位移最小算法和输入能量最小算法的基础加速度响应幅值较无开关控制显著变小,并且输入能量最小算法要小于筏体位移最小算法.

图7 浮筏隔振系统基础加速度响应幅值曲线(试验)Fig.7 Base acceleration response curve of floating raft isolation system(test)
从基础加速度响应幅值曲线的最大值(即共振幅值)来看,无开关控制对应的基础加速度响应幅值的最大值为0.022 m/s2,筏体位移最小算法对应的基础加速度响应幅值的最大值为0.016 m/s2,输入能量最小算法对应的基础加速度响应幅值的最大值为0.014 m/s2.筏体位移最小算法较无开关控制,减小为72%,输入能量最小算法较无开关控制,减小为63%.
比较图4,7可知:仿真分析的结果和试验研究的结果基本一致.采用筏体位移最小算法和输入能量最小算法进行半主动控制,浮筏隔振系统在共振频率附近的隔振效果明显优于无开关控制的隔振效果,在其他频率的隔振效果相差不大.
仿真得到的基础加速度响应幅值的大小与试验值存在一定的差异,可能的原因:仿真分析的模型是对实际试验系统的简化,不可避免存在一定的误差;仿真中设置的激振力的大小与试验中实际激振力的大小存在差异.
5 结 论
当激振频率接近系统共振频率时,浮筏隔振系统的隔振效果相对较差.通过仿真分析和试验研究,可以看出:采用笔者提出的筏体位移最小算法和输入能量最小算法,将浮筏隔振系统和半主动开关控制技术相结合,能够有效地降低浮筏隔振系统在受到共振频率基础的振动加速度响应,显著地改善系统的隔振效果.
参考文献:
[1] 马永涛,周炎.舰船浮筏隔振技术综述[J].舰船科学技术,2008,30(4):22-26.
[2] HAMBLEN W. Next generation stealth submarines[J]. Sea technology,1998,39(11):59-62.
[3] KUPERMAN A,AHARON I. Batter-yultracapacitor hybrids for pulsed current loads: a review[J]. Renewable & sustainable energy reviews,2011,15(2):981-992.
[4] 孙涛,陈大跃,黄震宇,等.一种新型潜艇浮筏的前馈模糊控制策略[J].船舶力学,2006,10(1):106-112.
[5] 赵成,陈大跃.潜艇浮筏隔振系统的半主动模糊滑模控制[J].机械工程学报,2008,44(2):163-169.
[6] 高新科,邵鹄.智能阻尼双层隔振系统的半主动最优控制[J].振动与冲击,2012,31(19):128-133.
[7] 高新科.船筏减振双线性系统的最优半主动阻尼控制[J].振动与冲击,2012,31(20):131-136.
[8] 王辉.面向半主动控制的可控浮筏隔振系统试验研究[D].杭州:浙江工业大学,2013.
[9] 朱雅辉,翁泽宇,耿超,等.半主动控制浮筏隔振系统的开关算法与仿真研究[J].机电工程,2016,33(3):265-270.
