MIMU/CSAC/BDS组合导航微系统的硬件设计*
2018-07-05陈德潘樊龙江孙昭行
陈德潘 陈 帅 樊龙江 孙昭行
南京理工大学自动化学院,南京210094
全球卫星导航系统产业的迅猛发展改变了人们的生活方式[1],中国自主开发研制的北斗卫星导航系统在通信系统、应急指挥和交通管理等领域均发挥了巨大的作用。然而,卫星导航系统存在的固有缺陷,使其在室内、地下和水下等物理阻碍环境以及电子对抗等复杂电磁环境下的服务性能严重下降,甚至无法正常工作。因此,未来定位导航授时(Positioning,Navigation and Timing)应用技术发展的重点是如何实现具备抗干扰性强和精度高的PNT信息服务[2]。
最近几年,国内开展了以微机电技术(Micro-Electro-Mechanical Systems,MEMS)为核心的微惯性测量单元(MIMU)和芯片原子钟(CSAC)的研究,其体积小、重量轻、成本低、功耗低、可靠性高和寿命长等优势,为微型化的组合导航系统的实现提供了可能[3-4]。
在此背景下,MIMU的输出信息经过解算可实时获取载体的位置和速度信息,但是无法克服自身偏移误差随时间积累的缺陷[5],需要北斗导航模块进行校正。CSAC存在频率偏移问题,导致其输出结果偏离准确时间,因此需要北斗导航模块输出的1PPS(Pulse Per Second)修正误差,同时提高北斗导航模块授时精度[6]。本文设计了一种以MIMU、CSAC和BDS导航模块为构架的组合导航微系统。充分分析了三者的接口设计与配置,三者的一体化设计提高了系统的可靠性和抗干扰能力。实验表明:MIMU/CSAC/ BDS的组合导航微系统在真实跑车环境和高动态仿真环境下,可以正常工作,并输出精度较高的性能指标。
1 MIMU/CSAC/BDS组合导航微系统的总体设计方案
MIMU/CSAC/BDS的组合导航微系统总体方案设计如图1所示。主要从以下4个部分介绍:
1)微惯导模块:微惯导模块利用MIMU中陀螺测得的角速率、加速度计输出的比力经过误差补偿后,通过串口发送给数据处理单元,采用导航算法解算获取位置、速度、加速度和姿态等导航信息。最后将数据传送给组合导航模块、通信接口模块和惯性辅助模块;
2)CSAC模块:CSAC可提供精确的时钟信息。CSAC和处理器通过串口通信,串口通信功能包括查询测量数据、频率调节及查询、设置/清除操作状态、芯片原子钟自动同步和1PPS驯服设置等;
3)BDS定位导航模块:BDS定位导航模块需要获取卫星信号相关器中锁存的多普勒频移信息、载波相位信息和导航电文等信息,通过解析得到星历、伪距和伪距率等信息,计算出当前载体的位置、速度以及时间信息;
4)组合导航模块:组合导航微系统中,CSAC提供精准的时间基准,MIMU经惯导解算得到的载体位置、速度信息与北斗卫星的位置、速度信息进行计算得到载体的伪距、伪距率;与此同时北斗定位导航模块解算可直接得到伪距、伪距率,将两者的信息进行基于伪距、伪距率差的卡尔曼组合滤波,得到载体的位置、速度及姿态误差,对系统进行修正,得到高精度的导航定位信息。
2 MIMU/CSAC/BDS组合导航微系统的硬件设计
组合导航微系统的硬件结构是由微惯性测量单元、芯片原子钟模块和DSP+ FPGA为核心的北斗导航模块组成。要实现组合导航微系统的功能,必须确定各个模块与DSP+FPGA之间的配置与接口设计,充分利用各个模块的资源。组合导航微系统的硬件设计结构图如图2所示。

图2 组合导航微系统硬件设计结构图
2.1 MIMU的硬件特征与配置设计
本系统采用的MIMU为本团队自主研发。MIMU的设计由4个部分组成,分别为惯性传感器模块、温度传感器模块、数字处理单元和减振系统。其中,惯性传感器模块由三轴MEMS加速度传感器芯片和三轴MEMS陀螺仪传感器芯片两两正交组成,完成载体坐标系轴的加速度及角速度测量。同时,在惯性器件ASIC(专用集成电路)上集成温度传感器,可以测量环境温度,以用于对每个轴的零偏和标度进行温度补偿,同时对两两轴向间的交叉耦合也进行补偿,提高其综合测量精度。数字处理单元中的3个角速度通道的输出、3个加速度通道的输出、温度信号及补偿信号用来进行误差补偿、数字滤波、划船效应和圆锥效应处理,以此提高惯性器件的使用精度。而减振系统可以保证良好的防振动和冲击的能力。
MIMU提供由微陀螺仪和微加速度计测量出的角速率信息和加速度信息,其采用J30J-15ZKP型矩形连接器,MIMU与处理器的连接图如图3所示。
MIMU对外通信采用RS-422 接口,输出的最大波特率为921600bps,数据更新频率最大为1000Hz,工作电压为5V,陀螺仪的零偏稳定性≤10°,加速度计的零偏稳定性≤0.1mg。通过RS-422接口将数据发出,经DSP处理芯片,进行组合导航信息融合。
2.2 CSAC的硬件特征与配置设计
CSAC可为组合导航微系统提供准确的时钟基准。本系统采用的XHTF1040型CPT微型原子钟,该原子钟具有尺寸微型化45×36×15 (mm3) 、+3.3V低电压供电且功耗低等特点。其外秒同步功能:1PPS同步精度优于50ns;外秒驯服精度≤5E-12(驯服1天后24小时平均值);保持性能≤5us(驯服1天后24小时保持时差)。CSAC频率准确度比普通的温补型晶振的频率准确度高出3~4个数量级,因此当采用CSAC作为卫星信号接收机的时钟信息源时,可认定接收机的时钟频率在相当长的一段时间里保持稳定的状态[7]。因为北斗卫星接收机每一次解算出来的钟差都是相互独立的,因此,可以把一段时间内接收机正常定位时获取的钟差信息记录成历史数据,根据记录的历史钟差信息建立钟差模型,并对后续一段时间内的钟差信息做出准确的预测。北斗卫星接收机的时钟Tbd与系统时Ts的关系可以写成:
Tbd-Ts=α0+α1(Ts-t0)+α2(Ts-t0)2
(1)
(2)
(3)
上式可以写成:
这下,驮子与常爱兰才反应过来,然后赶紧把李老师迎进屋子里。屋子里的凌乱是李老师能够想象得到的。在农村,家里收拾得很干净的不太有,更何况是弹棉花的人家,更何况是外乡人。
Tbd-Ts=Rα
(4)
其中:α0,α1,α2分别为相对偏差、钟速和钟漂信息,t0为参考历元信息。
(5)
CSAC提供的10MHz频率,结合通过天线接收北斗卫星1561.098MHz的载波频率,经过滤波和放大后,再通过混频下变频成中频信号,最后由A/D芯片采样,将模拟中频信号离散化成数字中频信号给FPGA处理。中频信号产生流程图如图4所示。

图4 中频信号产生流程图
芯片原子钟模块能够提供精准的1pps秒脉冲和精准的时钟信号,经过驯服后,可独立提供精准的1pps秒脉冲供导航处理器使用,实现独立授时功能[8]。该模块与导航模块数据处理单元的DSP数据通信采用RS232串口进行数据传输,DSP通过读取RS232中的数据可以实时观测芯片原子钟的温度、驯服状态及锁定时间等状态;卫星导航模块定位后会输出一个基准的秒脉冲,将该秒脉冲输出给芯片原子钟的“1pps_IN”管脚,引入后来驯服原子钟的1pps秒脉冲;芯片原子钟驯服后输出的1pps秒脉冲经过中断的方式被DSP读取,来辅助卫星导航模块,提高时间精度;芯片原子钟提供一个精准的HCMOS电平信号,将该信号接入到射频单元与FPGA单元代替原有的温补型晶振,能够提供更精准的频率,减少了卫星导航模块本身造成的钟差。芯片原子钟与处理器连接图如图5所示。

图5 芯片原子钟与处理器连接图
本系统射频模块选用Maxim Integrated公司的MAX2769[9]。对MAX2769进行初始化配置,设置NDIV值为2491,RDIV值为16,进行中心频率推算:
(6)
fB1=1561.098MHz
(7)
fLO=NDIV×f=2491f
(8)
fbdcen=1561.098MHz-2491f=4.223MHz
(9)
其中,fCSAC表示原子钟频率,fB1表示B1载波频率,fbdcen表示中心频率。
2.3 北斗导航模块的硬件特征与配置设计
北斗导航模块是基于DSP+FPGA的,其主要硬件部分包括射频前端处理模块、基带信号数字处理模块和定位解算模块。射频前端处理模块对卫星信号进行放大、变频、滤波和模数转换,得到数字中频信号;基带信号数字处理模块对数字中频信号进行捕获、跟踪、位同步和帧同步处理,得到导航测量值和导航电文;定位解算模块利用导航测量值和导航电文进行定位解算,最终得到用户的位置信息,获取定位观测值。
北斗系统射频模块选用Maxim Integrated公司的MAX2769,MAX2769芯片内集成的Σ-ΔN分频频率合成器可实现±40Hz精度的中频编程,从而能够与主机系统所提供的任意基准或晶体频率配合工作,使得北斗系统射频模块仅需少量外部元件,即可构建完整的低成本接收机方案,符合当前低功耗、高集成度、小尺寸、低价格的发展潮流。
EP4CE115F23C8N是Altera公司Cyclone系列的第四代产品[10],采用台湾半导体生产公司(TSMC)的60nm低功耗(LP)工艺技术。其具有低功耗、低成本和高性能的特点。FPGA利用配置的I/O口读取MAX2769处理过的数字中频信号,并将信号传送到通道相关器进行处理,累加器将I/Q信号进行锁存并触发累加中断;TIC锁存器锁存相关量并触发TIC中断,同时输出1PPS秒脉冲。整体结构设计分为:时钟时基发生器、数据重采样模块、相互独立的通道模块、寄存器组模块等。FPGA中采用多通道并行接收卫星信号,通道中的相关器的每个通道占用资源为750LE,与其他不倍频纯使用LE实现同类功能的相关器代码相比,优化程度很高。FPGA内部相关器结构图如图6所示。
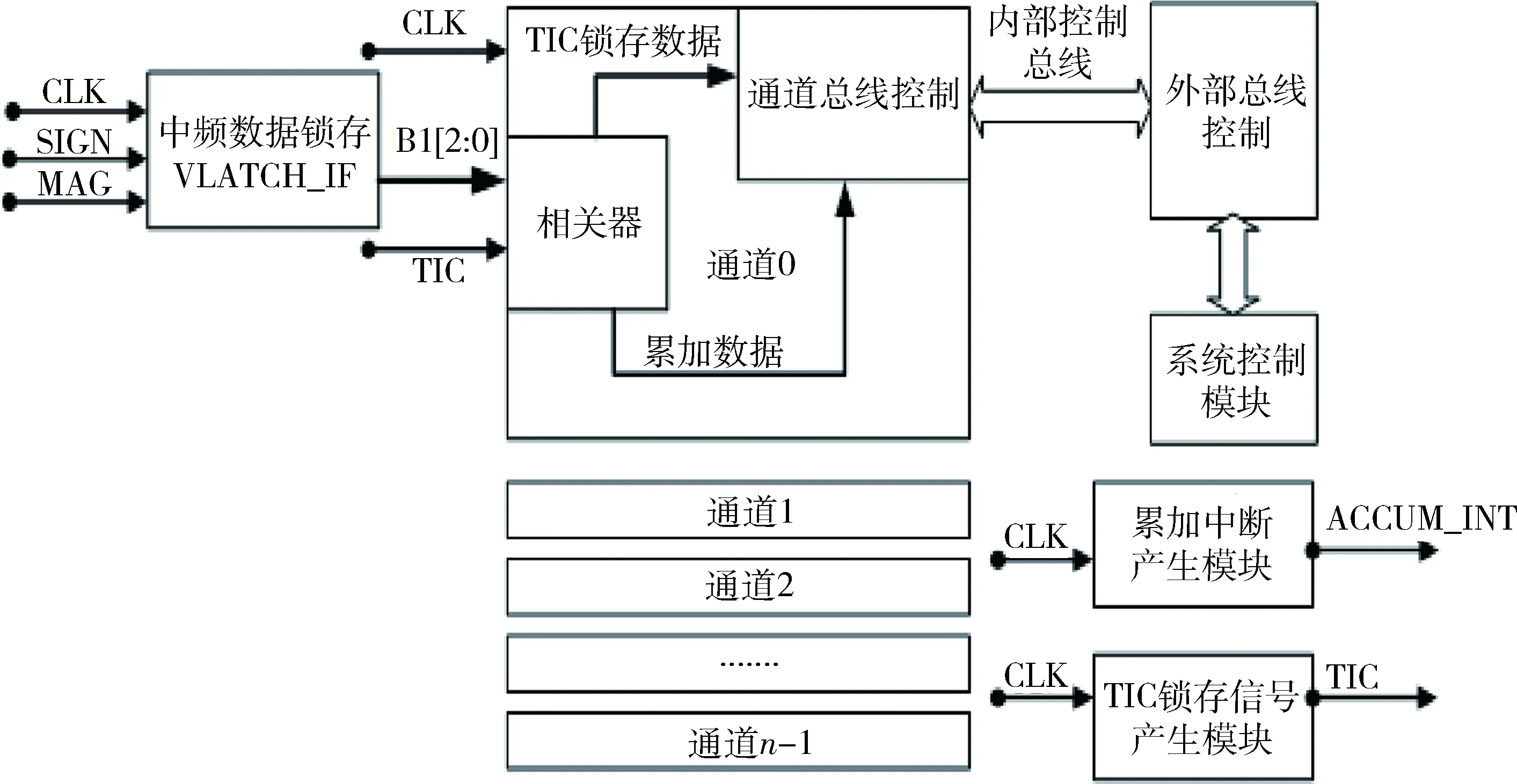
图6 FPGA内部相关器结构图
定位解算及信息融合处模块采用的是TI(Texas Instruments)公司的定点/浮点数字信号处理器TMS320C6747[11],主频高达300MHz,拥有丰富的外围模块,外形尺寸仅为17mm×17mm。它的内核使用了两级缓存结构,分别是32KB一级程序缓存(LIP)和32KB一级数据缓存(LID);256KB二级程序或数据存储器(L2RAM)。同时第二级(L2)还可以访问一个1024KB集成ROM。当DSP进行导航解算时,FPGA剥离数字中频信号包含多普勒频移在内的载波和伪码,DSP读取导航电文。北斗导航模块信号流程图如图7所示。

图7 北斗导航模块信息流程图
DSP的EMIFA接口通过数据总线和地址总线与FPGA配置好的数据总线和地址总线相连,其中数据总线长度为16位,使用数据线EMA_D [15:0]与FPGA的D[15:0]连接。地址总线长度为12位,由于每次读写数据的长度为2个字节,在地址总线中最低位恒为0,DSP使用地址线EMA_A[11:1] 与FPGA的A[11:1]连接。地址中高5位产生通道选择信号,低6位是每个通道内寄存器的偏移地址。DSP与FPGA总线连接图如图8所示。
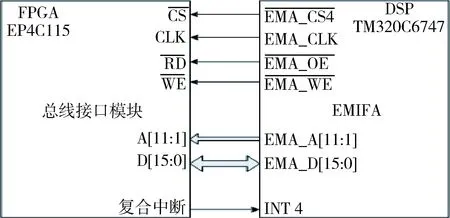
图8 DSP与FPGA总线连接图
3 MIMU/CSAC/BDS组合导航微系统的底层硬件驱动设计
组合导航微系统的处理器底层驱动设计主要包含系统时钟驱动程序设计和中断驱动程序设计。
北斗接收机和CSAC能够输出高精度的整秒时间,但时间输出频率比较低,不能满足组合导航算法中对精确时间的需求。DSP的定时器模块无法进行时间修正,本系统结合CSAC精确的时间信息、定位解算出的时钟钟差信息和DSP本身的定时器,设计了一个高精度的系统时间模块,其工作流程如图9所示。接收机仅在定位解算后,利用自身的卫星时间和CSAC驯服后的整秒时间,计算得到定时器时间的误差量用来修正定时器时间。

图9 系统时间模块工作流程图
组合导航微系统中断设置如表1所示。

表1 中断设置表
DSP的中断方式基本利用事件触发,为保证组合导航微系统的实时性,对性能要求高的功能模块均采用中断服务子程序的方式进行处理。
4 实验测试
为了验证本原理样机的可行性,将原理样机各部分调试完成后,与软件配合进行地面跑车(低动态)实验和高动态模拟器实验。
跑车实验选择在南京市开发区路段进行。出发点纬度是32.0273629°,经度118.8957339°,高度是13.537m。在出发点通过寻北仪测得惯导前向与北向的夹角为150°,则初始偏航角设置为150°。采用高精度组合导航系统作为基准。在实验中使用监控软件实时采集系统输出的信息并存入文件,并对实验数据进行处理分析,比较得出误差。实验结果如图10~11所示。

图10 组合导航微系统速度误差
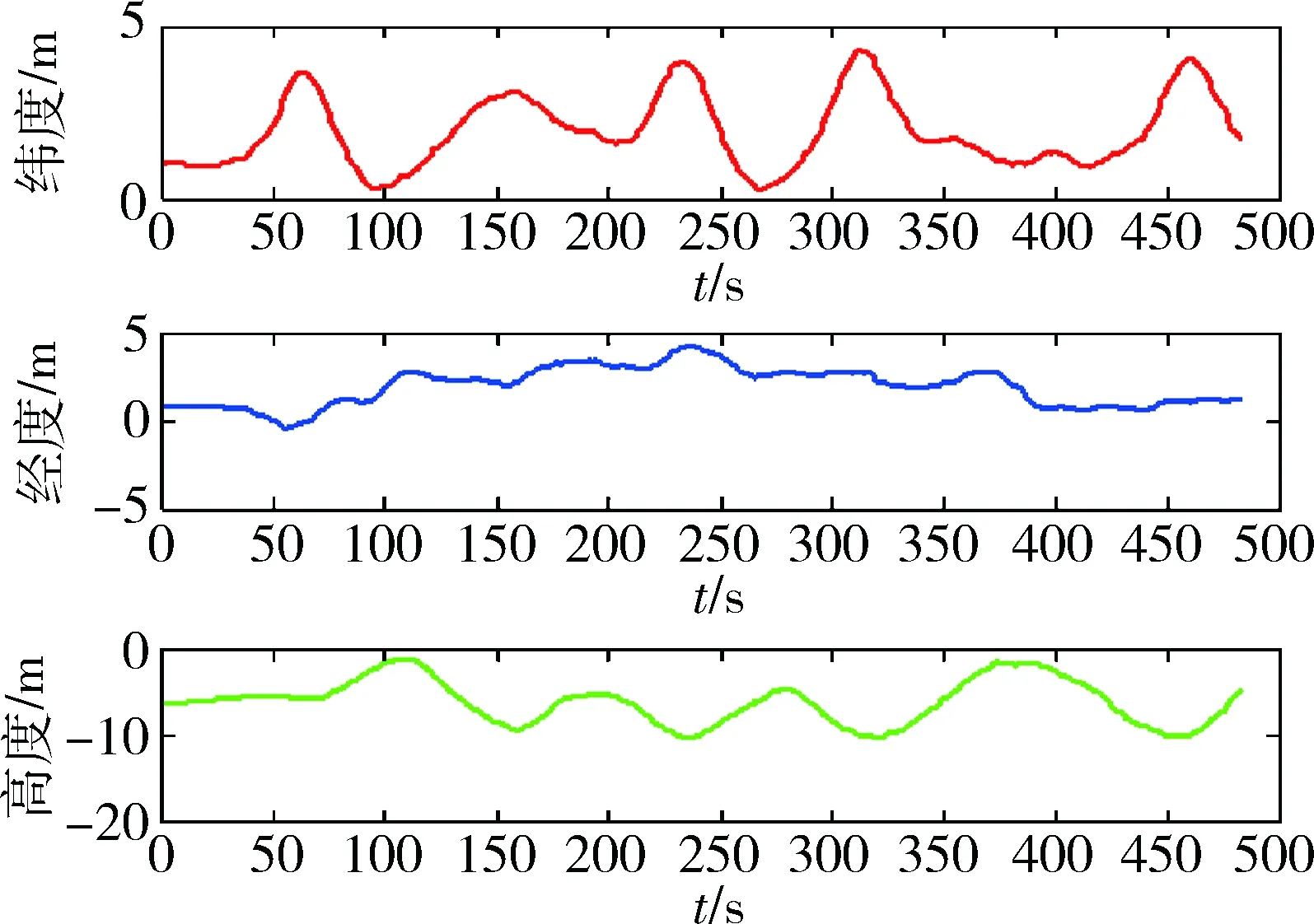
图11 组合导航微系统位置误差
从图10~11中得出,纬度误差2.99m(1σ),经度误差3.05m(1σ),高度误差8.72m(1σ),东向速度误差0.08m/s(1σ),北向速度误差0.12m/s(1σ),天向速度误差0.15m/s(1σ)。跑车实验结果表明,组合导航微系统在真实的环境下能为载体提供良好的定位信息,符合设计要求。
高动态模拟器实验采用卫星导航信号模拟器仿真载体的高动态飞行轨迹,并基于组合导航微系统中使用的接收机搭建半实物仿真系统,轨迹设定为大圆轨迹,半径为600km。载体不断作加速和减速运动,速度和加速度按正弦变化。最大速度为8km/s,最大加速度为50g。仿真轨迹图、线速度和线加速度如图12~13所示。
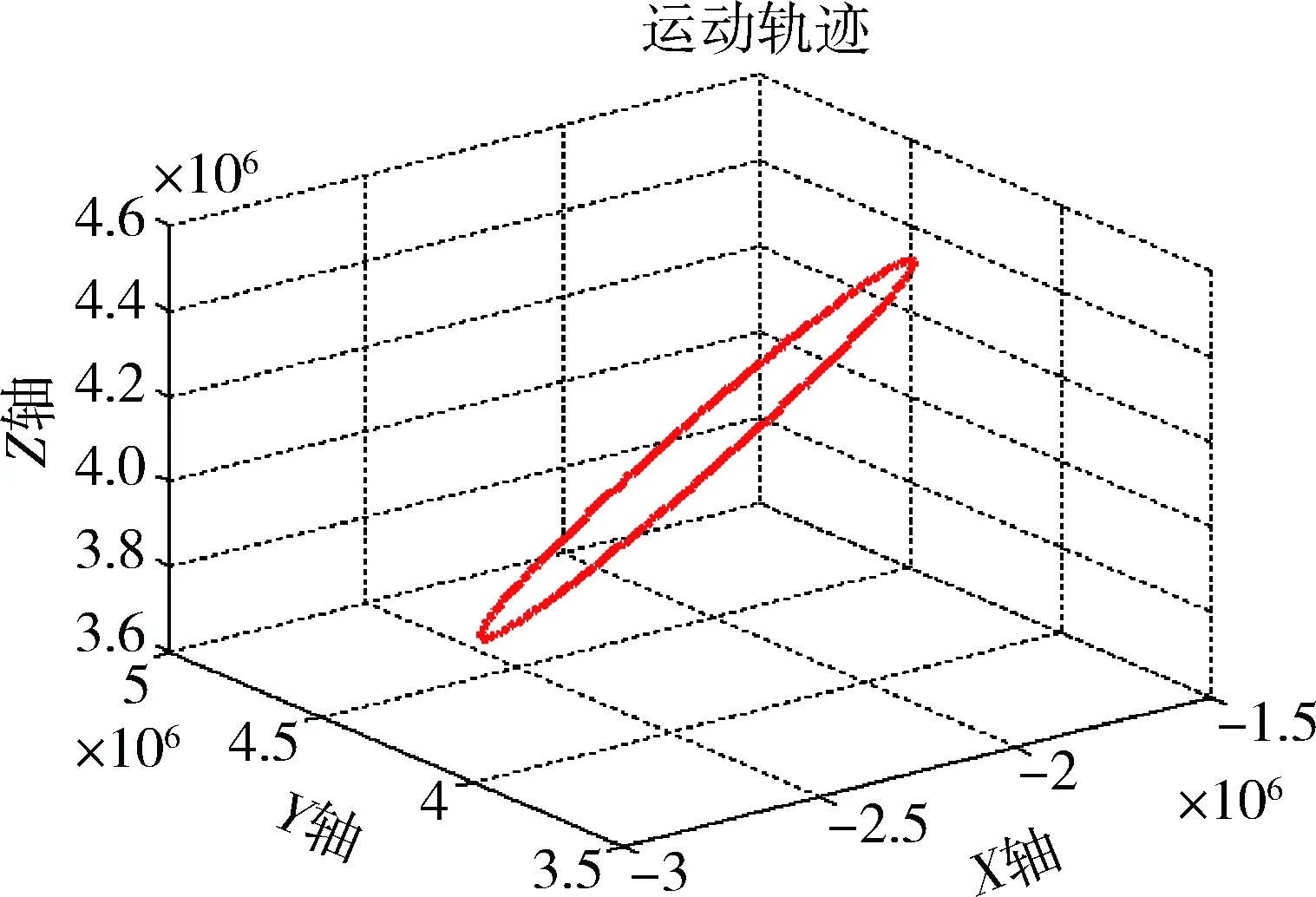
图12 仿真轨迹图

图13 轨迹线速度与加速度图
实验结果如图14~15所示,与原始轨迹比较,组合导航微系统的纬度误差为0.48m(1σ),经度误差为1.07m(1σ),高度误差为2.25m(1σ),东向速度误差为0.32m/s(1σ),北向速度误差为0.32m/s(1σ),天速误差为0.11m/s(1σ)。实验结果表明组合导航微系统在高动态环境下性能指标良好,符合设计要求。

图14 组合导航微系统速度误差

图15 组合导航微系统位置误差
5 结论
提出了1种MIMU/CSAC/BDS组合导航微系统的设计方案,并由此完成了组合导航微系统的硬件和底层驱动设计与实现工作。该组合导航微系统具有功耗低和体积小等特点,易于载体安装。经过多次测试,实验表明:组合导航微系统能够为用户在真实环境下提供准确的位置和速度信息。此外,组合导航微系统具有良好的跟踪性能与导航精度,在高动态环境下亦可提供准确的位置和速度信息。本文设计的组合导航微系统应用场景以军民两用为背景,在无人机车和卫星、火箭、导弹等高动态载体相关场景下具有良好的发展前景。
参 考 文 献
[1] 李旭,李为民.美俄军事卫星系统发展现状与趋势[J]. 国防科技,2015(2):43-48. (Li Xu,Li Weimin. Development Status and Trend of American and Russian Military Satellite Systems [J]. Defence Technology, 2015(2):43-48.)
[2] 江城,张嵘.美国Micro-PNT发展综述[J].中国卫星导航学术年会,2015. (Jiang Cheng, Zhang Rong. The General Development of the United States Micro-PNT [J]. China Satellite Navigation Conference, 2015.)
[3] 刘钝,甄卫民,张风国,欧明.PNT系统体系架构与PNT新技术发展研究[J]. 全球定位系统, 2015(2): 48-52. (Liu Dun, Zhen Weimin, Zhang Fengguo , Ou Ming. PNT System Architecture and PNT Study on the Development of New Technologies [J]. Global Positioning System, 2015(2): 48-52.)
[4] 杨元喜.综合PNT体系及其关键技术[J].测绘学报,2016,45(5):505-510. (Yang Yuanxi. Comprehensive PNT System and Its Key Technology [J]. Journal of Surveying and Mapping, 2016,45(5): 505-510.)
[5] Barbour N,Schmidt G.Inertial Sensor Technology Trends[J]. IEEE Sensors Journal,2001,1(4): 332-339.
[6] 王淑华.国外CPT CSAC技术发展现状 [J].微纳电子技术,2016,53(3) :137-145. (Wang Shuhua. Foreign Technology Development of CPT CSAC [J]. Micronanoelectronic Technology, 2015(2): 48-52.)
[7] 汪中.Review of Chip-Scale Atomic Clocks Based on Coherent Population Trapping[J].中国物理,2014, 23(3):47-58.(Wang Zhong. Review of Chip-Scale Atomic Clocks Based on Coherent Population Trapping[J]. Chinese-Physics, 2014, 23(3): 47-58.)
[8] 赵令令,陈优.CPT原子钟的概念及发展[J].中国科技术语,2014(s1).(Zhao Lingling, Chen You. Concept and Development of CPT Atomic Clock [J].Chinese Science and Technology Terms Journal ,2014 (11).)
[9] Wang Yue. GPS Software Receiver Based on MAX2769[J].Journal of Hebei University of Engineering,2012(3).
[10] Wang Hua, Chang Jing, Qin Changlu, Tian Xiang. An Implementation Scheme of GNSS Signal Simulator Based on DSP and FPGA [J] .Computer Science and Service System(CSSS), 2011:1080-1083.
[11] Yang Chun, Chen Qingwei, Zhang Ruilei, Zhang Lei. Design and Implementation of Integrated Navigation System Based on DSP [J]. Control Conference, 2014, 74(5-1):528-533.
