半物理仿真技术工业应用现状及发展趋势
2018-07-05蔡安江蒋周月郭师虹薛晓飞
蔡安江 蒋周月 郭师虹 薛晓飞
1. 西安建筑科技大学 机电工程学院, 西安 710055 2. 西安建筑科技大学 土木工程学院, 西安 710055
随着计算机技术的高速发展,仿真技术已经应用到各行各业,而半实物仿真作为其中一个分支,已广泛涉及到机电技术、液压技术、控制技术及接口技术等领域。半实物仿真技术将具体的研究对象接入计算机仿真回路进行试验,因而更接近实际生产。
系统仿真技术通过系统模型试验来研究系统的运行特性,主要分为数学仿真、半物理仿真和全物理仿真3种类型[1]。半物理仿真,又称半实物仿真或物理-数学仿真,其英文名称国内多用 semi-physical simulation[2-3]表示,而国外多用 hardware-in-the- loop simulation (HIL)[4-5]表示。半物理仿真将被仿真对象系统的一部分以实物或物理模型的方式引入仿真回路,被仿真对象系统的其余部分以数学模型描述,并把它转化为仿真计算模型,借助于物理效应模型,实现实时数学仿真与物理仿真的联合仿真[6]。
半物理仿真的优势是能够把数字仿真的灵活性和物理仿真的精确性相结合,可以充分发挥各自的功能[7]。为了将较少的开发时间、故障成本以及系统模拟的计算资源应用到我国各项研发工作中,将半物理仿真技术推广到我国其他各项研究领域具有重要的意义。本文分析了半物理仿真技术在国内外的研究现状,总结了其目前的应用对象和应用领域,展望了半物理仿真的发展趋势。
1 半物理仿真国内应用现状
随着仿真技术的快速发展,半物理仿真已成为现代工程技术的重要支柱,在国防工业领域和民用工业领域都有广泛应用。
1.1 国防工业领域
在国防工业领域,我国已经建成了多种特点的半物理仿真系统。2010年,哈尔滨工业大学的常同立[8]探讨了一种验证空间对接动力学半物理仿真系统仿真结果真实性的试验研究方法,该方法具有较强的实用性,能够广泛应用于实际空间对接中。2014年,深圳航天东方红海特卫星有限公司的杜晓东等人[9],利用半物理仿真系统验证双目视觉引导下的航天器近距离自主交会接近的特征识别、位姿解算、导航制导与控制等关键算法。
在军事系统方面,仿真技术的应用为部队指挥、作战和训练提供了有效工具,为我军现代化建设做出了重要贡献。2010年,北京航天自动控制研究所的周志久等人[10],设计了不带转台和带转台的2种半物理仿真系统模拟无人机的飞行状况,且2种半物理仿真系统可以相互关联,能够对整个无人机飞控系统设计的合理性及有效性进行完备的验证;2014年,北京理工大学的范世鹏等人[11]通过建立激光末制导导弹半物理仿真平台,设计出末制导段弹道半物理仿真模型,深入研究导引头入瞳光学特性和实时更新照射环境特性,创造了更接近于飞行试验的半物理仿真环境,达到仿真技术相似原理的要求。
1.2 民用工业领域
在民用工业领域中,半物理仿真运用在组合导航系统、控制系统和调压系统等方面。
在导航系统方面,2006年,北京航空航天大学的曹娟娟等人[12],提出了1种用于减少 MIMU/GPS/MMC组合导航滤波算法计算量的快速滤波方法,以提高算法的实时性,并利用半物理仿真试验验证了该算法的有效性和实时性。2011年,南京航空航天大学导航研究中心的于永军等人[13]设计了基于 DSP的半物理仿真系统,并利用其验证了基于一次采样的四阶龙格库塔捷联算法能有效提高捷联解算的实时性和导航精度。
在控制系统方面,中国科学院沈阳自动化研究所机器人学国家重点实验室的周焕银等人[14]于2011年通过半物理仿真平台验证了基于神经网络补偿器的动态反馈控制算法具有更好的动态性能和较强的抗干扰能力,相比于 PID控制算法,大大提高了系统的鲁棒性;2014年,西北工业大学的陈俊硕等人[15],利用半物理仿真实验验证了其设计的永磁同步电机速度控制器提高了系统鲁棒性。
在为国防工业领域和民用工业领域服务的同时,半物理仿真的应用也正不断向交通、教育、通讯和经济等多个领域扩展。
2 半物理仿真国外应用现状
对模型的实现来说,通过使用硬件作为计算机模拟的一部分,可以减少模拟复杂性及合并因素。半实物仿真已成功地应用于控制、制造等许多领域。
2.1 控制领域
2013年,韩国的Junoh Jung等人[16]使用状态依赖Riccati方程技术,对航天器编队飞行姿态同步控制策略进行了分析和研究,并使用半实物仿真实验和数值模拟对问题进行跟踪和调节;2015年,德国的J. Paul等人[4]对微卫星的空间对接与交会设计了半物理仿真系统。2015年,法国的C.Quérel等人[17]开发了一个半物理模型预测由柴油发动机产生的氮氧化物(NOx)的排放量;2016年,埃及的Ahmad M. El-Nagar等人[18]在研究中,用半物理仿真验证了区间二型模糊比例微分控制器(IT2F-PD)的性能。
2.2 机械制造领域
2005年,德国的Stoeppler G等人[19]提出了一种不同类型的仿真策略,该方法在机床的仿真模型中集成了控制硬件;2014年,波兰的Krzysztof J. Kalin′ski等人[5]开发并真正执行了对柔性工件的主动振动控制进行高速铣削过程监视的方法。
2.3 机器人领域
在机器人领域,半实物仿真已经从许多不同的角度应用。这些方法包括:机器人在回路仿真,如使用真实的和模拟的移动机器人在一个虚拟的环境中相互作用[20]。控制器在回路仿真,其中一个真正的控制单元与机器人的计算机模型交互[21],以及关节在环仿真,在关节上模拟真正的致动器上的负载[22]。
2.4 其他领域
除了集中应用于以上领域,半物理仿真还应用在了循环加热系统[23]、车辆驾驶员信息系统和报警系统[24]、分布式网络的开发[25]及并行随机力[26]等方面。半物理仿真可以减少开发时间和成本[19],已被证明是有用的设计工具。因此,对其应用对象进行全方位了解有利于更合理地学习借鉴不同领域的半物理仿真。
3 半物理仿真应用对象概况
通过对半物理仿真的应用进行归纳总结可知,其应用对象主要存在于诸如航空航天[1, 6-9, 27]、无人机[11]、组合导航系统[12-13]、控制系统[14-15]及调压系统等行业与领域,如表1所示。
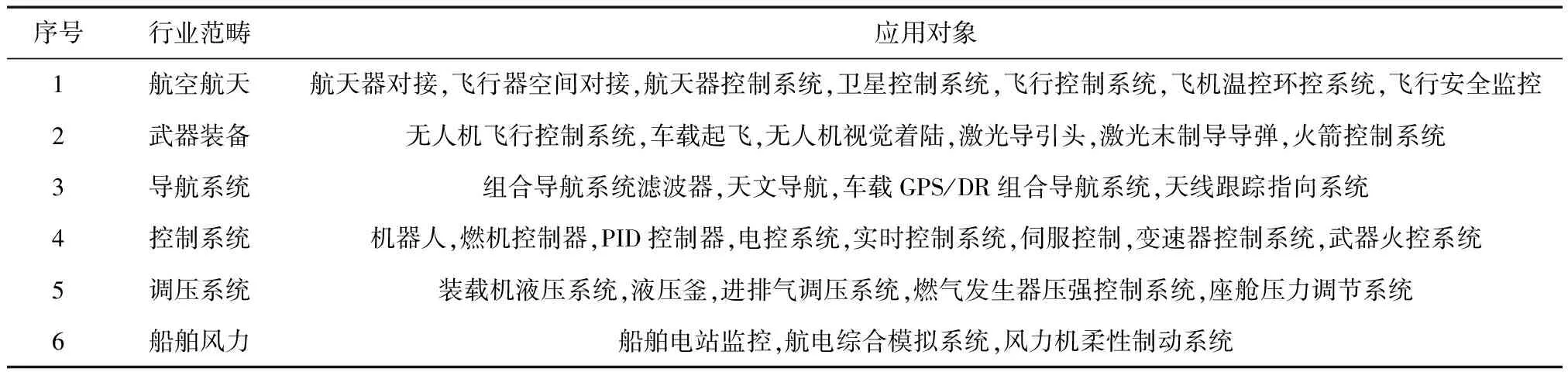
表1 半物理仿真的应用对象概况
从其应用对象的归纳分析可以看出,当前半物理仿真的应用虽然涉及到社会生产与生活的各个领域与各种机械设备,但绝大多数半物理仿真的研究还停留在航天器的空间对接以及无人机的飞行控制;距离实现半物理仿真应用至整个社会生产的各个领域是值得未来探索的一项重要的研究内容。
4 半物理仿真发展趋势
4.1 半物理仿真研究趋势
从上述国内外应用现状可以看出,半物理仿真技术在航空航天和武器制导等军用领域已被广泛应用,而在民用工业领域,除了组合导航系统方面,目前还未被推广。军用技术转为民用,服务于国家经济建设已成常态,也是发展趋势。所以,半物理仿真技术未来的发展和应用将在军、民的工业领域展开,尤其是传统制造工业领域。
目前,我国正大力推广“中国制造2025”,并与德国“工业4.0”全面对接。德国“工业4.0”是以智能制造为主导的第四次工业革命,旨在通过充分利用“信息物理系统”(Cyber-Physical System),将制造业向智能化转型。半物理仿真技术以其兼具数字仿真的柔性和物理仿真的精确性的特点,将助力信息物理系统的推广应用。
从德国“工业3.0”的“数字化”升级到德国“工业4.0”的“智能化”,数控机床是基础。此外,《中国制造2025》中明确表示要以提升可靠性、精度保持性为重点,开发高档数控系统,加快实现产业化,加强用户工艺验证能力建设,并且预期关键工序数控化率到2025年指标达到64%。如果以半物理仿真作为信息系统,以数控机床作为物理系统,通过计算过程和物理进程相互影响的反馈循环,实现深度融合和实时交互,可以增加和扩展新的功能。故将半物理仿真应用到数字控制工业领域,实现数控机床的智能化,是未来的一大发展趋势,机械化产品也将从“数控时代”向“智能时代”发展,从根本上提高产品功能、性能和市场竞争力。
4.2 半物理仿真技术发展趋势
控制系统结构和计算机建模仿真技术发展深刻影响着半物理仿真技术的发展。一方面,复杂的多领域系统的半物理仿真技术随着计算机仿真在系统研究过程中的深入应用,提出了一系列新的技术需求。近年来,针对半物理仿真技术的研究也在致力解决这一工程问题,其首要前提是对复杂多领域系统的统一模型描述。另一方面,装备系统规模逐渐扩大,超大规模的系统仿真计算需求日益增长,为充分利用超级计算机和云计算服务的强大计算功能,实现超大规模运算,有必要在半物理仿真中实现对系统模型的自动分解和并行化计算。
世界各国一直重视半物理仿真,近年来,在计算机技术飞速发展的信息化智能化背景下,半物理仿真已成为现代工程技术的重要支柱。其在航空航天、机械、电工、化工、通信,特别是国防军事等领域的工程设计研究,已成为现代高科技产业的代表之一。未来半物理仿真将向高智能化、全面化和集成化发展,在工程技术领域发挥更大的作用。
5 总结
半物理仿真技术以其高效率、低成本的特性,广泛应用于国内外的航空航天和武器制导等军事领域。在民用工业领域也因其逼真度较高,而不断开拓发展。本文介绍了半物理仿真概念与特点,归纳其国内外应用现状,在总结该技术应用对象的基础上预测了半物理仿真技术的发展趋势。
半物理仿真技术将在现代工业领域朝着高智能化和综合化发展,在中国制造智能转型升级的过程中发挥出更大的积极作用。
参 考 文 献
[1] 张新邦. 航天器半物理仿真应用研究[J]. 航天控制, 2015, 33(1): 77-83. (Zhang Xinbang. The Research on Application of Hardware in the Loop Simulation for Spacecraft[J]. Aerospace Control, 2015, 33(1): 77-83.)
[2] Wang Xiaoxiao, Wang Xicheng, Wang Ye, et al. A Novel Faraday Effect Based Semi-physical Simulation Method for Bandwidth of Fiber-optic Gyroscope[J]. Optik, 2014, 125(3): 1358-1360.
[3] Li Ye, Pang Yongjie, Zhang Lei, et al. Semi-physical Simulation of AUV Pipeline Tracking[J]. Journal of Central South University, 2012, 19(9): 2468- 2476.
[4] Paul J, Dettmann A, Girault B, et al. Inveritas: A Facility for Hardware-in-the-loop Long Distance Movement Simulation for Rendezvous and Capture of Satellites and Other Autonomous Objects[J]. Acta Astronautica, 2015, 116: 1-24.
[5] Kaliński K J, Galewski M A. Vibration Surveillance Supported by Hardware-in-the-Loop Simulation in Milling Flexible Workpieces[J]. Mechatronics, 2014, 24(8): 1071-1082.
[6] 常同立,丛大成,叶正茂等. 空间对接地面半物理仿真台系统仿真研究[J]. 航空学报, 2007, 28(4): 975-982. (Chang Tongli, Cong Dacheng, Ye Zhengmao, et al. Simulation on HIL Ground Experiment Simulator for On-orbit Docking[J]. Acta Aeronautica Et Astronautica Sinica, 2007, 28(4): 975-982.)
[7] 延皓,叶正茂,丛大成等.空间对接半物理仿真原型试验系统[J]. 机械工程学报, 2007, 43(9): 51-59. (Yan Hao, Ye Zhengmao, Cong Dacheng, et al. Space Docking Hybrid Simulation Prototype Experiment System[J]. Chinese Journal of Mechanical Engineering, 2007, 43(9): 51-59.)
[8] 常同立. 基于冲击碰撞模型的空间对接半物理仿真真实性验证方法[J]. 振动与冲击, 2010, 29(1): 22-26. (Chang Tongli. A Verification Method for Authenticity of HIL Simulation Based on A Vibro-impact Model[J]. Journal of Vibration and Shock, 2010, 29(1): 22-26.)
[9] 杜晓东,高学海,徐文福等. 基于双目视觉的空间近距离交会半物理仿真系统[J]. 仪器仪表学报, 2014, 35(6): 1282-1291. (Du Xiaodong, Gao Xuehai, Xu Wenfu, et al. Semi-physical Simulation System for Close-range Rendezvous Based on Binocular Vision[J]. Chinese Journal of Scientific Instrument, 2014, 35(6): 1282-1291.)
[10] 周志久,韦闽峰. 无人机飞行控制仿真系统研究[J]. 航天控制, 2010, 28(1): 64-69. (Zhou Zhijiu, Wei Minfeng. Research on Flight Control Simulation System of UAV[J]. Aerospace Control, 2010, 28(1): 64-69.)
[11] 范世鹏,林德福,路宇龙等. 激光制导武器半实物仿真系统的设计与实现[J]. 红外与激光工程, 2014, 43(2): 394-397. (Fan Shipeng, Lin Defu, Lu Yulong, et al. Design and Achievement of Hardware-in-the-loop Simulation System for Guided Shell Based on Laser Semi-active Seeker[J]. Infrared and Laser Engineering, 2014, 43(2): 394-397.)
[12] 曹娟娟,房建成,盛蔚. 一种组合导航系统快速滤波方法及半物理仿真[J]. 北京航空航天大学学报, 2006, 32(11): 1281-1285. (Cao Juanjuan, Fang Jiancheng, Sheng Wei. Fast Data Fusion Method for Integrated Navigation System and Hardware in Loop Simulation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(11): 1281-1285.)
[13] 于永军,刘建业,熊智等. 高动态载体高精度捷联惯导算法[J]. 中国惯性技术学报, 2011, 19(2): 136-139. (Yu Yongjun, Liu Jianye, Xiong Zhi, et al. High-precision SINS Algorithm for High Dynamic Carriers[J]. Journal of Chinese Inertial Technology, 2011, 19(2): 136-139.)
[14] 周焕银,刘开周,封锡盛. 基于神经网络的自主水下机器人动态反馈控制[J]. 电机与控制学报, 2011, 15(7): 87-93. (Zhou Huanyin, Liu Kaizhou, Feng Xisheng. Dynamic Feedback Control Based on ANN Compensation Controller for AUV Motions[J]. Electric Machines and Control, 2011, 15(7): 87-93.)
[15] 陈俊硕,刘景林,张颖. 永磁同步电机新型矢量控制[J]. 西安电子科技大学学报(自然科学版), 2014, 41(4): 40-48. (Chen Junshuo, Liu Jinglin, Zhang Ying. New Vector Control of the Permanent Magnet Synchronous Motor[J]. Journal of Xidian University (Natural Science), 2014, 41(4): 40-48.)
[16] Jung J, Park S, Kim S, et al. Hardware-in-the-Loop Simulations of Spacecraft Attitude Synchronization Using the State-Dependent Riccati Equation Technique[J]. Advances in Space Research, 2013, 51(3): 434-449.
[17] Quérel C, Grondin O, Letellier C. Semi-physical Mean-value NOx Model for Diesel Engine Control[J]. Control Engineering Practice, 2015, 40: 27-44.
[18] El-Nagar A M, El-Bardini M. Hardware-in-the-loop Simulation of Interval Type-2 Fuzzy PD Controller for Uncertain Nonlinear System Using Low Cost Microcontroller[J]. Applied Mathematical Modelling, 2016, 40(3): 2346-2355.
[19] Stoeppler G, Menzel T, Douglas S. Hardware-in-the-loop Simulation of Machine Tools and Manufacturing Systems[J]. Computing & Control Engineering, 2005, 16(1): 10-15.
[20] Hu X. Applying Robot-in-the-loop-simulation to Mobile Robot Systems[C] // International Conference on Advanced Robotics Icar, 2005: 506-513.
[21] Cyril X, Jaar G, St-Pierre J. Advanced Space Robotics Simulation for Training and Operations[J]. American Institute of Aeronautics and Astronautics, 2000: 1-6.
[22] Temeltas H, Gokasan M, Bogosyan S, et al. Hardware in the Loop Simulation of Robot Manipulators Through Internet in Mechatronics Education[C]// Conference of the IEEE Industrial Electronics Society, 2002, 4:2617-2622.
[23] Gamberi M, Manzini R, Regattieri A. Simulator for Building Hydronic Heating Systems Using the Newton-Raphson Algorithm[J]. Energy and Buildings, 2009, 41(8): 848-855.
[24] Gietelink O J, Ploeg J, De Schutter B, et al. Development of a Driver Information and Warning System with Vehicle Hardware-in-the-loop Simulations[J]. Mechatronics, 2009, 19(7): 1091-1104.
[25] Ersal T, Brudnak M, Salvi A, et al. Development and Model-based Transparency Analysis of an Internet- distributed Hardware-in-the-loop Simulation Platform[J]. Mechatronics, 2011, 21(1): 22-29.
[26] Mancini T, Mari F, Massini A, et al. Anytime System Level Verification Via Parallel Random Exhaustive Hardware in the Loop Simulation[J]. Microprocessors and Microsystems, 2016, 41(C): 12-28.
[27] 余波,朱纪洪,范勇等. 飞行控制系统大闭环半物理仿真研究[J]. 航天控制, 2010, 28(2): 51-58. (Yu Bo, Zhu Jihong, Fan Yong, et al. Research on Large-scale Hardware-in-closed-loop Simulation of Flight Control System[J]. Aerospace Control, 2010, 28(2): 51-58.)
