基于像素位移估计的水下湍流退化图像畸形校正算法
2018-07-04,,
,,
(湖北大学 计算机与信息工程学院,武汉 430062)
0 引言
随着水下目标识别、水下地质勘探等应用的发展,水下成像技术也得到了重视和发展。但在真实的水下环境中,流体相较于静态水体会对成像造成更大的影响,尤其是湍流的存在会明显地降低成像质量[1],使短曝光图像造成严重的畸变和不均匀。由于随机温度和盐度的变化会造成水介质的折射率改变从而引起湍流[2],因此在存在湍流的水下,影响成像质量的主要因素是悬浮颗粒散射以及湍流造成的散射[3]。散射形成成像视场的光场非均匀性变异,造成成像畸变[4],从而引起水下湍流图像的退化。因此,对水下湍流退化图像的畸形校正研究具有非常重要的意义。
目前常规的图像复原处理方法较多,而对于水下湍流退化图像的研究较少。幸运块选择方法最早用于大气图像处理,它是利用具有动态相位失真的不同的短曝光图像序列会包含随机局域高质量的图像来处理图像的[5]。随后,学者[6-7]利用幸运块技术对水下图像的复原处理做了一系列研究,随着研究的深入,发现图像配准技术能在一定程度上改善图像畸变。文献[8]提出了一种基于运动场核回归的方法,结果表明基于水面波形的估计方法也可以改善成像质量。文献[9]通过建模一个三维水波结构来处理图像复原问题,但此方法对水面波纹度要求较高,因此对处理强湍流存在局限性。文献[10]提出将自适应光学(Adaptive Optics,AO)技术用于图像处理,然而高成本、高复杂度的AO系统使得此方法也存在一定的限制。还有学者[11]提出采用递归和反射线追踪法用于重建图像。文献[12]提出了一种基于运动补偿的高质量图像块选择与去噪的水下图像重建方法。另有学者[13]提出了一种两阶段的图像重建方法,在第一阶段,采用BIQ度量标准及K均值聚类算法(K-Means)分别选取参考帧和清晰帧序列;在第二阶段,采用像素配准技术和二维插值技术重建畸变图像,虽然这个方法可以有效地缓解湍流带来的影响,但计算量较高。而陈等人[14]提出了一种基于正则化共轭梯度迭代的重建算法,可优化方程,进而进行迭代重建。
因此,在本文中,采用自定义度量标准选取短曝光图像的参考帧和清晰度较高的输入帧序列,使用像素配准和二维配准算法抑制畸变退化,采用核相关滤波算法提高算法的速度和效率,在减少计算量提高处理速度的同时也可使去畸效果更好。目标检测的实验结果表明,采用本文提出的水下湍流图像去畸处理方法,可以有效抑制图像畸变,提高图像的成像质量。
1 理论和方法
1.1 参考帧的选取
使用自定义度量标准测量输入帧序列的清晰度,根据锐度值选取参考帧和部分较清晰的输入帧序列。假设D为水波在水下湍流中传输Z的距离后的波结构函数[2]:
D(ρ,Z)=3.603×10-7k2zε-1/3(χT/ω2)ρ5/3·
(0.419ω2-0.838ω+0.419)
(1)
式中,波数k=2π/λ,λ为波长(通常水下传输系统中λ为530 nm,本文数值计算取此值),ρ为光波垂直于传输方向截面上两点间的距离。
因此P的熵为:
(2)

结合式(2),图像的期望熵为:
(3)
选择锐度值最高的输入帧作为参考帧,并保留锐度值较高的序列帧作为输入帧序列,用于后续的图像处理过程。图像锐度计算公式为:
(4)
1.2 像素配准技术
使用后向映射形式得到保留的输入帧序列相对于参考帧的像素移位,根据式(5)计算出保留帧序列中同一点像素相对于参考帧中该像素在水平和垂直方向上的位移均值:
(5)
其中:Ra和Rb分别表示水平和垂直方向上的位移均值,g表示帧索引,G表示保留帧序列的总数。
通过式(6)反演出此像素在水平和垂直方向上的校正后移位均值表达式,因此Ra和Rb的逆近似为:
(6)

1.3 二维配准技术
根据式(7)推导出所有保留输入帧中每个像素的校正后的移位:
(7)

将保留帧进行复原和重建分别如式(8)、(9)所示:
(8)
(9)
其中:f1(a,b)表示复原后图像,f2(a,b)表示重建后图像,fg表示保留帧序列,θ表示旋转角度。
令当前恢复的去畸图像作为下一次迭代的参考图像,通过多次迭代,可使去畸效果更好。
1.4 核相关滤波算法
上述迭代过程可利用正则化约束算法,正则化的主要思想是要解决求最小值的数学病态问题,而约束算法的设计过程可采用智能学习跟踪(Kernelized Correlation Filters,KCF)算法的思路,两者的表达式分别如式(10)、(11)所示:
(10)
(11)

式(11)的目标是要解出一个由模糊样本图像训练出来的最佳逼近解f(x)=nTx+n0,从而使得式(11)的值即最小二乘的风险值最小。其中参数n可由公式n=(XXT+βI)-1XTy求出,β为控制过拟合的参数。
在算法的设计过程中,为了使用模糊样本图像来训练最小二乘分类器,并简化运算量,可以构造一个循环矩阵。假设H(x)是一个i×i的矩阵,那么它能通过一个I*i的向量的循环移位获得,由此可得到式(12):
(12)
通过公式I=EKE,可将上述矩阵转换为式(13):
(13)
由于研究的是对角矩阵,因此可将式(13)转换为式(14):
(14)
将式(14)代入求参数n的公式中,可求得线性回归的权值n的离散傅里叶变换形式如式(15)所示:
(15)
由此可将训练最小二乘分类器的过程大大简化,极大地减少了运算量。
上述求解n的过程在通常情况下往往是求解线性问题,但在大多数情况下需要解决的都是非线性问题,这在一定程度上会给求解过程带来困难。因此,可以通过高维求解和核函数的方法可将高维空间中的非线性问题转换为线性问题来求解。
已知n的求解如式(16)所示:
(16)
其中:τ(xi)表示将x映射到高维空间的函数。
将式(16)中δ化简为δ=(F+βI)-1y,其中F为核矩阵,元素Fij=κ(xi,xj),I为单位矩阵。
(17)
其中:κ表示核函数,它的运算定义如下:
τT(x)τ(x′)=κ(x,x′),由此便将求最小n的问题转换为求最小δ的问题。
通过近一步化简可得:Fz=H(κxz),其中H(x)表示由x循环移位得到的矩阵,Hz表示所有训练样本和参考样本之间的核矩阵。由Hz可求得目标函数的表达式如式(18)所示:
f(z)=(Hz)Tδ
(18)
对式(18)求傅里叶变换后的形式如式(19)所示:
(19)
若κ为线性核函数,则目标函数的求解可利用式(15)求出;而本文采用的核函数κ为高斯核,其表达形式如式(20)所示:
(20)
1.5 图像评估
为了评估水下湍流退化图像的畸形校正图像复原效果,需要选择特定的图像质量评价标准。由于水下图像不存在理想或可参考的标准图像,所以,传统的评价标准如均方差和信号噪声比等评价标准不能选用。本文实验中选择客观的图像质量评价指标作为评估标准,如模糊度量(BM)和信息容量(IC)。
模糊度量被提出并广泛用于图像的质量评估[15]。模糊度量是基于计算不同保留的输入帧的相邻像素间变化的分析:
BM=max(sDvertical,sDhorizontal),

(21)

信息容量被定义为[16]:
(22)
其中:p(i,j,d,θ)代表像素之间的相关性,i和j代表像素点的坐标,d代表成像距离,θ代表像素之间的关联方向。
由上述表达式可知,公式中的BM值越小,图像质量越好,而IC的情况则相反。
2 实验结果与分析
为了进一步说明本文方法在水下湍流图像去畸处理中的有效性,本文的实验数据是通过实验室模拟的湍流环境和真实的海洋湍流环境中的成像系统获得。
实验室环境中模拟的受控湍流环境由水泵提供动力,将水泵、流量计等设备与水箱连接构成水循环系统。实验用水采用无微小悬浮物颗粒的水质,通过测量水样的衰减系数,确保样本图像的畸变仅由湍流散射产生。水箱的尺寸为1.5 m×0.5 m,并在两端设有截面尺寸为0.04 m×0.04 m的进水口和出水口以连接水泵、流量计。激光和CCD图像传感器被安装在水箱上方,并分别设置在水箱的长边的两端和靶板上,目标物体被置于水下。
水箱是形成水下湍流的主要区域,水流从水箱进水口流入,在进水口附近的区域内湍流流动最为明显,是主要的实验区域。水泵驱动水流流动,水阀控制水流的大小,当进水口水流达到一定速度时会产生湍流,通过控制水箱进水口处的水流速度来获得不同强度的湍流,流量计能实时读取流速,然后可计算湍流雷诺数和湍流强度,确保样本图像是在湍流环境下获得的。
2.1 微湍流环境
当进水口水流速度为5 m/s时,CCD对湍流环境中的目标物体进行拍摄,目标物体在5 s内被拍摄60次,并将成像结果输入计算机处理器。拍摄到的样本图像如图1(a)所示,将样本图像分别基于盲复原算法、POCS算法及本文算法的复原和重建,实验结果分别如图1(b)~(e)所示。图1所列图像的模糊度量值和信息容量值均在表1中列出和比较。表2为复原和重建算法的计算机程序运行处理时间。

(a)样本图像; (b)盲复原算法的结果图; (c)本文复原方法的结果图; (d)POCS超分辨率重建算法的结果图; (e)本文重建方法的结果图图1 样本图像,复原和重建结果

图像图1(a)图1(b)图1(c)图1(d)图1(e)BM0.43760.31640.37930.26840.2172IC2.46755.53526.22975.98608.0152
从图1(b)和1(c)可以看出,盲图像复原算法出现了振铃效应,而本文复原方法,虽存在振铃效应,但有效抑制了像素的畸变。从图1(d)和(e)可以看出,本文重建方法同样能抑制像素畸变,但效果不如复原好。

表2 算法运行时间比较 min
从表1中可以看出,相较于盲复原算法和POCS重建算法,本文方法的处理结果,BM值更小,IC值更大。因此可以得出结论,无论从主观评价还是客观评价上来看,本文的复原和重建方法都优于传统方法。且从表2中可以看出,本文所提出的方法在处理时间上具有优势。
2.2 强湍流环境
当进水口水流速度为25 m/s时,CCD对湍流环境中的目标物体进行拍摄,目标物体在5 s内被拍摄60次,并将成像结果输入计算机处理器。拍摄到的样本图像如图2(a)所示,将样本图像分别基于盲复原算法、POCS算法及本文算法的复原和重建,实验结果分别如图2(b)~(e)所示。图2所列图像的模糊度量值和信息容量值均在表3中列出和比较。表4为复原和重建算法的计算机程序运行处理时间。

(a)样本图像; (b)盲复原算法的结果图; (c)本文复原方法的结果图; (d)POCS超分辨率重建算法的结果图; (e)本文重建方法的结果图图2 样本图像,复原和重建结果

表3 复原和重建的比较结果

表4 算法运行时间比较 min
从图2(b)和2(c)可以看出,盲图像复原和本文复原方法,都没有出现明显的振铃效应,但盲图像复原导致图像更加模糊,这是由于盲图像复原采用的高斯模糊核,而强湍流的流速分布特性是随机分布。本文复原方法,对畸变则有明显的改善。从图2(d)和2(e)可以看出,POCS重建的去畸变效果和微湍流情况类似,但本文重建方法,明显优于其他各种方法。
从表3中可以看出,无论复原还是重建,本文方法的处理结果,BM值更小,IC值更大,其中本文重建方法得到的BM值和IC值,比其他方法都要接近标准值。因此可以得出结论,本文复原和重建算法都能改进样本图像的质量,本文复原方法适合微湍流情况,而本文重建方法适合强湍流情况。从表4中可以看出,本文重建方法的时间优势。
2.3 海洋实地实验
真实的海洋湍流环境在中国南海海域开展,拍摄的样本图像由水下封装成像系统获得,并将成像结果输入计算机处理器。采用流量计测得实验的海洋水体湍流属于强湍流情况。拍摄到的样本图像如图3(a)所示,将样本图像分别基于盲复原算法、POCS算法及本文算法的复原和重建,实验结果分别如图3(b)~(e)所示。图3所列图像的模糊度量值和信息容量值均在表5中列出和比较。表6为复原和重建算法的计算机程序运行处理时间。

(a)样本图像; (b)盲复原算法的结果图; (c)本文复原方法的结果图; (d)POCS超分辨率重建算法的结果图; (e)本文重建方法的结果图图3 样本图像,复原和重建结果

图像图3(a)图3(b)图3(c)图3(d)图3(e)BM0.65890.46770.24650.15460.0597IC4.36466.32457.87956.25689.5675
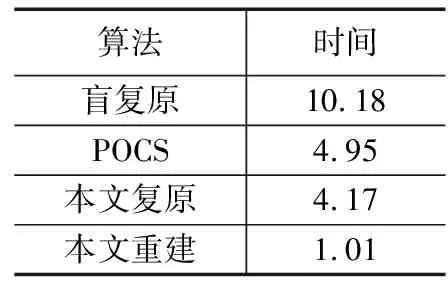
表6 算法运行时间比较 min
上述实验结果和强湍流情况的结果类似,因此可以验证室
[9] 左 力.航空装备维修保障模式研究[J].电子设计工程,2017,25(3):1-4.
[10] 袁 辉,王 夷,郑震山.航空装备MTBF动态评估与预测模型[J].机械设计与制造,2015(4):31-34.
[11] 杨 召,肖明清,胡 斌.测试信息不完备条件下航空电子装备故障诊断[J].计算机应用,2013,33(S1):46-47.
[12] 罗晓军,文 莹,方甲永.复杂航空电子装备故障诊断规则提取[J].计算机测量与控制,2012,20(2):294-296.
[13] 程进军,夏智勋,胡雷刚.基于遗传神经网络的航空装备故障预测[J].空军工程大学学报(自然科学版),2011,12(1):15-19.
[14] 郭双民.基于决策树的航空装备维修级别[J].四川兵工学报,2008(4):60-61.
