基于激光反射投影原理的重叠玻璃尺寸测量方法研究
2018-07-04,,,,
, , ,,
(1.湖北工业大学 机械工程学院,武汉 430068; 2.现代制造质量工程湖北省重点实验室,武汉 430068;3.华中科技大学 数字制造装备与技术国家重点实验室,武汉 430074)
0 引言
目前,激光投影法是一种常用的非接触式物体尺寸的测量方法,它是将激光线按测量要求投影到被测物上,通过拍摄被测物表面的激光投影线段,经过图像处理分析后计算出被测物尺寸。王坚[1]利用激光投影法对火炮管内壁产生的疵病深度进行定量检测,解决了由于疵病形成原因较复杂、尺寸过小、形状不规则以及身管的空间狭长给疵病深度定量测量造成困难的问题,对研究疵病影响火炮寿命的问题起到积极的推动作用。赵斌[2]在研究细丝直径尺寸的测量时,利用了双激光投影法将相距一定距离的两个激光源对同一细丝进行投影,通过测量屏上的投影宽度即可获得细丝直径,该方法可实际用于测量直径0.1~1 mm的物体。在玻璃深加工企业生产中,通过玻璃转运架将玻璃在不同的工艺间中进行传送,玻璃特征是重叠摆放的。企业要实现玻璃抓取搬运的自动化,就必须获取玻璃的平面尺寸。但是,直接使用激光投影法测量有困难。
本论文将激光线投影至重叠玻璃表面,进行激光投影法测量重叠玻璃平面尺寸的实验。在实验中发现,激光投影线在重叠玻璃间透射及反射形成多条条纹,无法提取出被测玻璃的边缘点特征,很难找到被测玻璃表面的投影线段,所以直接使用激光投影法很难测量出被测玻璃的平面尺寸。
为了解决上述问题,本文在激光投影法的基础上,结合重叠玻璃投影特性的理论分析,并根据实验结果,提出了一种新的测量重叠玻璃平面尺寸的方法——基于激光反射投影原理的移动式测量方法,并设计了一套重叠玻璃平面尺寸测量系统。实验数据表明:这个测量方法能达到实际生产的精度要求,对于重叠玻璃的平面尺寸测量具有可行性,同时具有连续自动化测量的优点。
1 重叠玻璃平面尺寸测量模型及方法
1.1 激光反射投影测量模型
本文提出了基于激光反射投影原理的移动式测量方法,其原理是将线性激光线投影至被测物表面,激光线被反射后会在投影平面上形成一条投影光带,通过获取该投影光带的长度,并结合入射光线、反射光线以及被测物之间的几何关系,可计算出被测物体的实际尺寸[3]。激光反射投影法测量模型如图1所示。
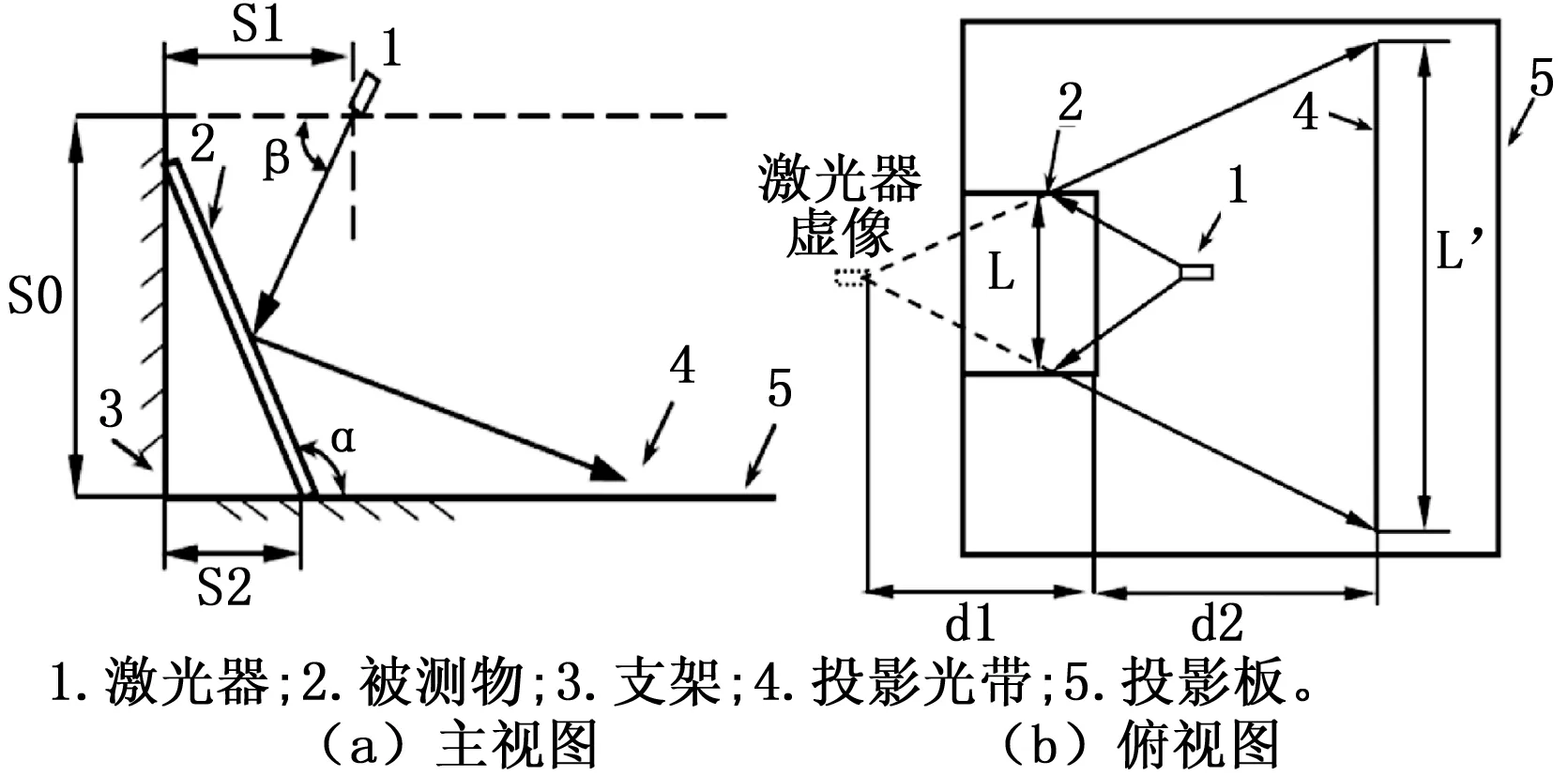
图1 激光反射投影法测量模型
根据图1的几何关系推导出被测物体的平面尺寸计算公式为:
(1)
(2)
(3)
式中,L′为投影光带的长度,d1为入射光束的长度,d2为经被测物反射后光束的长度,S0为线性激光源与投影平面之间的距离,S1为线性光源与垂直支撑平面之间的距离,S2为被测物在水平支撑面的接触线与垂直支撑面之间的距离;α为被测物体与投影平面之间的夹角,β为入射光线与投影平面水平方向之间的夹角。
在被测物体放置情况已知的情况下,距离参数S0、S1和S2均可提前测得,相应的角度α也可获知。对于角度β而言,由于激光线的投影效果会影响投影光带的获取,进而影响光带长度L′的计算精度,因此测量前需要不断调整角度β以达到最佳测量效果。最终计算公式可简化为:
L=KβL′
(4)
式中,Kβ=d1/(d1+d2),是与角度有关的比例系数。
1.2 基于CCD相机的测量方法
基于上述的模型分析,在工程应用中实际使用基于CCD相机的测量方法,如图2所示。这个测量方法是将激光线投影在重叠玻璃表面上,使用CCD相机拍摄经重叠玻璃反射后的激光投影线图像,通过图像处理分析后获取投影线的长度,进而计算出被测玻璃的尺寸。

图2 基于CCD相机的测量方法示意图
对于单个被测物而言,当使用CCD相机获取经被测物反射后的投影线长度时,可以直接利用公式(4)计算得出被测物体的实际尺寸。对于被测物为重叠玻璃而言,当依次获取每层玻璃的尺寸时,1.1节所述的模型中距离是依次减小的,即计算中作为变量也会影响最终玻璃尺寸计算结果。根据公式(4),玻璃尺寸计算公式优化为:
L=Ks2KβL′
(5)
式中,Ks2是与s2距离有关的比例系数,L′是投影光带的长度。
对于小尺寸的玻璃而言,可使用CCD相机一次性拍摄被玻璃反射后的激光投影线,记激光线与被测玻璃右边缘的交点为点A,点A经过反射投影后在投影面上形成的标记点记为点A’;记激光线与被测玻璃左边缘的交点为点B,点B经反射投影后在投影面上形成的标记点为B’;
在重叠玻璃不同位置处形成的激光反射投影线的投影特性可反映出被测玻璃的摆放情况和边缘信息等特征,分析激光反射投影线的投影特性发现激光线经重叠玻璃反射后会在投影光带中的标记点A’和B’处形成断点,该断点可作为求解重叠玻璃平面尺寸的边缘点特征。通过图像处理获取标记点A’和B’的坐标,根据标记点的坐标来计算出投影光带的长度。因此分析提取出反映重叠玻璃平面尺寸的边缘点特征即可计算出被测玻璃的尺寸[4]。
以相机的成像平面建立图像坐标系,如图3所示。在这个测量方法中,设经图像处理分析后求得的标记点坐标为A’(Ua,Va)和B’(Ub,Vb),假设激光器的发散角为0,则玻璃尺寸的计算公式为:
(6)
式中,dP表示单个像素所表示的实际物理长度,可通过标定相机提前获得。
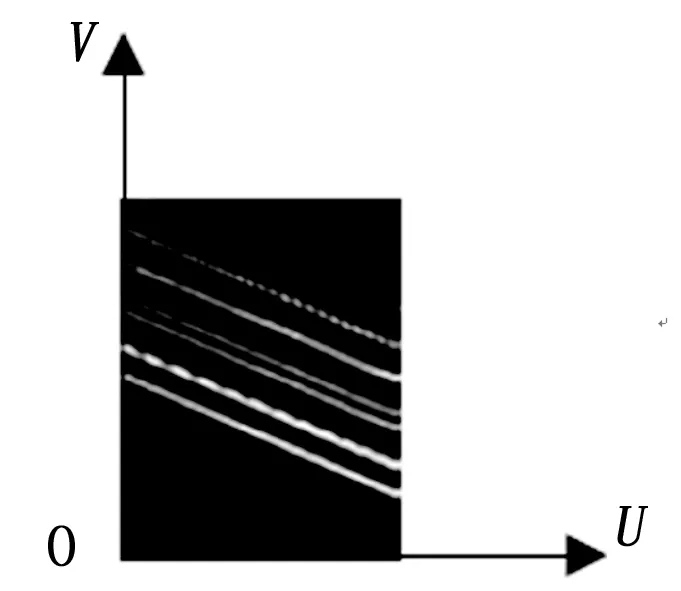
图3 图像坐标系
1.3 基于移动式的测量方法
根据1.2节中的测量方法分析,如果被测物的尺寸过大,一次性获取投影光带长度无法保证测量结果的精度,例如长度为1 m的被测物,使用500万的相机进行拍摄,单个像素长度为0.3 mm,当拍摄图像的误差达到十几个像素时,被测物的尺寸误差达到3 mm以上。同时激光器散射过大,会导致拍摄的图像不清晰,进一步增加了最终测量结果误差,因此我们采用基于激光反射投影原理的移动式测量方法,如图4所示。激光线经重叠玻璃反射后在投影面上形成多条光带,沿玻璃长度方向移动相机以连续获取不同位置处的反射投影线图像。
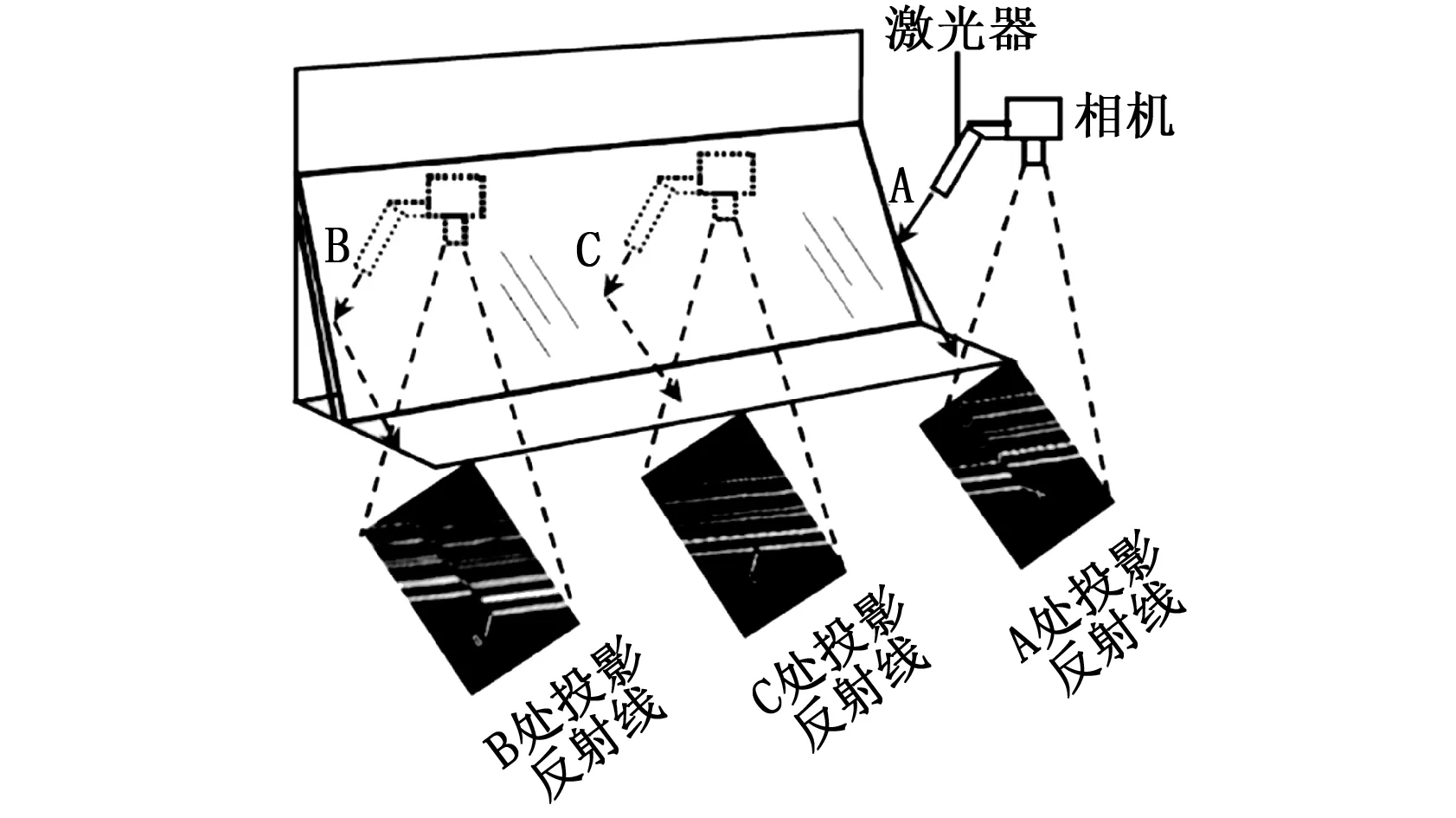
图4 基于移动式的测量方法示意图
图4中,同样地记激光线与被测玻璃右边缘的交点为点A,点A经过反射投影后在投影板上形成的标记点记为点A’;记激光线与被测玻璃左边缘的交点为点B,点B经反射投影后在投影板上形成的标记点为B’;记玻璃中间位置处激光线上某一点为点C,点C经反射投影后在投影板上形成的标记点记为点C’;记相机首次分别拍摄到标记点A’和B’时,相机两位置之间的距离为S。根据1.2节中所述,激光线经重叠玻璃反射后会在投影光带中的标记点A’和B’处形成断点,该断点可作为求解重叠玻璃平面尺寸的边缘点特征,通过图像处理获取标记点A’和B’的坐标,根据标记点的坐标来计算出投影光带的长度。
在移动过程中,相机在世界坐标系中的位置是变化的,在由相机所确定的图像坐标系下获取的坐标需转换到同一世界坐标系下后参与计算。将图像坐标系中的点与世界坐标系中的对应点进行坐标转换时,需要结合图像坐标系、相机坐标系和世界坐标系三者的转换关系[5]。
3个坐标系的转换关系如下:
(7)
式中,(u,v,1)是空间中任意一点P在图像坐标系中以像素为单位的齐次坐标;dx和dy分别为单个像素在X轴和Y轴方向的物理长度;(u0,v0)是相机的主点坐标,一般位于图像中心。(Xw,Yw,Zw,1)是点P在世界坐标系中的齐次坐标;R和T分别是世界坐标系和相机坐标系之间的旋转矩阵和平移向量,其中R是3*3正交矩阵,T是三维的平移向量。
在这个测量方法中,只考虑二维平面上的坐标计算并以投影板平面建立世界坐标系,式(7)中Zw以常数0参与运算。设经图像处理后求得标记点的坐标为A’(Ua,Va)和B’(Ub,Vb)(坐标系的定义如图3) ,经过等式(7)转换后的世界坐标系坐标为A’(Xwa,Ywa,0)和B’(Xwb,Ywb,0),假设激光器的发散角为0,则玻璃尺寸的计算公式为:
L=Ks2Kβ[S+(X'wa-X'wb)]
(8)
式中,Ks2Kβ表示测量长度与玻璃实际长度之间的比例系数,与激光器和水平方向的夹角β以及距离S2有关,β∈(40°,70°)。
2 图像处理及标记点识别算法
根据上述1.2节和1.3节分析,计算重叠玻璃平面尺寸的关键在于求出标记点的坐标,标记点坐标识别的准确性也最终影响玻璃尺寸测量的精度。在相机移动的过程中,CCD相机获取的激光线在某一位置处形成的反射投影线图像如图5所示,根据投影特性分析可知,成像平面上最下方的反射投影线对应于最外层玻璃。
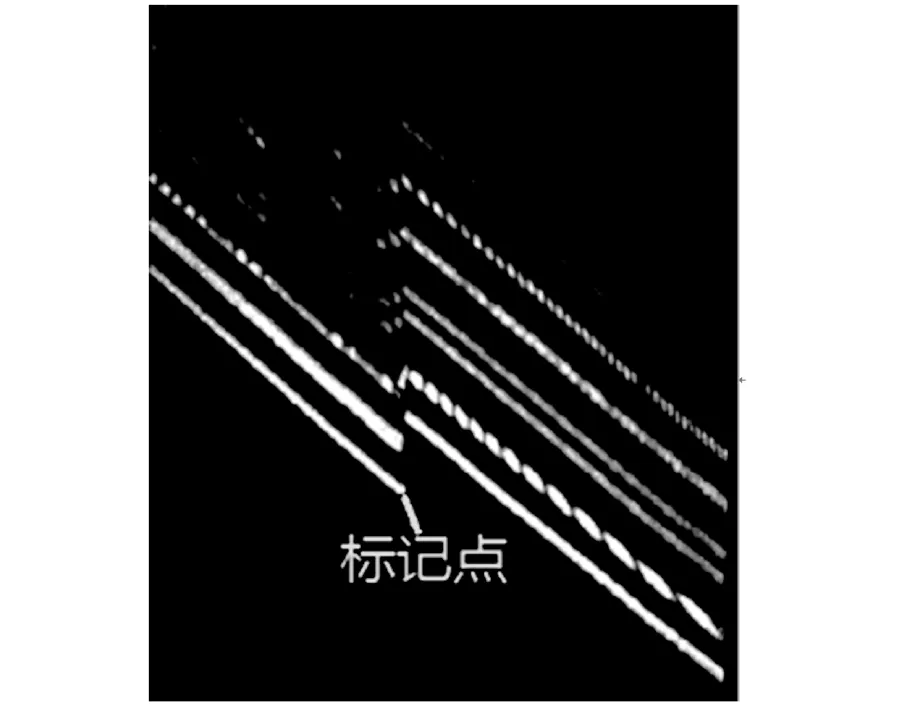
图5 重叠玻璃的反射投影线
为了去除图片中的噪声以及多余的图像信息,提高标记点的提取精度,在获取反射投影线图像后,需要对图像进一步处理,处理流程如图6所示。
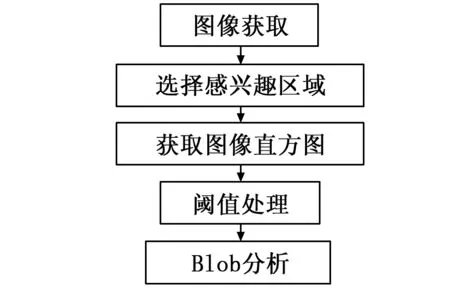
图6 标记点识别的图像处理流程
为了在保证识别精度的同时提高识别效率,选择激光反射投影线上标记点所在局部区域作为后期处理的感兴趣区域,并获取该区域图像的灰度直方图,根据获取的图像灰度直方图,选择合适的阈值对反射投影线段图像进行阈值处理,将反射投影线和背景分开,消除多余的孤立噪声对反射投影线的影响。
对获取的图像进行阈值处理时,一般常用的方法是使用确定的阈值将图片的灰度值分为0和255两个部分,从像素上看是将图片分为黑和白两种颜色[6]。具体归纳如下:
(9)
其中:f(x,y)为图像的灰度值函数。
在确定阈值并对图像进行阈值处理后,便可以进行标记点的识别。根据1.3节中的分析,标记点处于激光反射投影线段的起始点和终止点位置,定位求出两点的位置坐标即可。Blob分析(Blob Analysis)是对图像中相同像素的连通区域进行分析,该连通区域称为Blob块。Blob分析可为机器视觉应用提供图像中的斑点数量、位置、形状和方向。根据阈值处理后的图片,确定感兴趣区域,将反射投影线从像素级别转换为连通分量级别并形成起始点、中间位置点和终止点等多个连通区域,通过Blob分析计算出Blob块的质心坐标,选取质心纵坐标最小的Blob块,其坐标即作为我们所求的标记点的坐标,起始位置处标记点坐标检测结果如图7所示。
根据已获取的标记点的坐标,选取纵坐标最小的标记点,将其坐标分别代入公式(7)和(8)中,从而计算出被测玻璃的实际长度尺寸L。
3 玻璃测量实验系统设计
基于上述的反射投影测量模型和分析的关键技术,并根据本文提出的基于激光投影反射原理的移动式测量方法,设计了一套重叠玻璃平面尺寸测量系统。该系统的结构主要包括CCD相机、激光器、投影板、横向导轨、横向电机、计算机和其他外设等,测量结构示意图如图8所示。激光器、相机和投影板通过测量支架固定在一起,并整体位于横向导轨上;玻璃支架上放置有若干块长度尺寸不等的玻璃。

图8 重叠玻璃平面尺寸测量实验装置示意图
4 实验结果及误差分析
4.1 实验结果
本测量实验采用的是Basler相机,分辨率为1 280*1 024,采用的镜头焦距为8 mm,相机移动拍摄的距离间隔为10 mm。利用该实验平台对不同尺寸的玻璃进行测量,每种尺寸测量10组数据,测得的数据如表1所示。
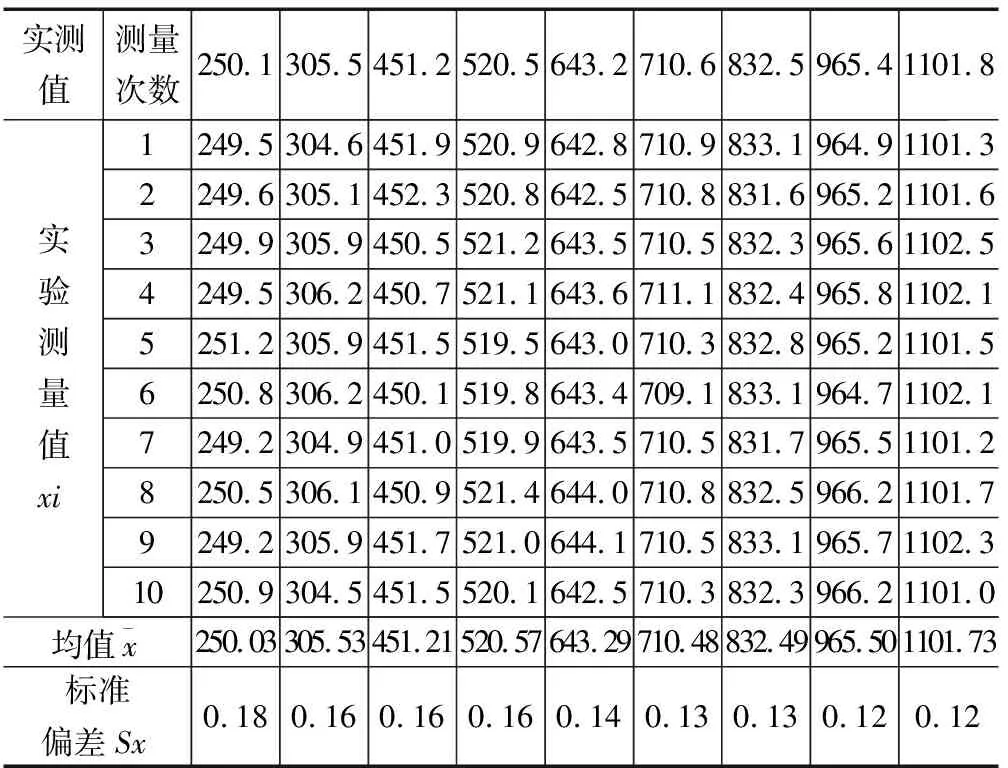
表1 实验测量结果 mm


表2 计算测量结果理论值
4.2 误差分析
这个测量方法中的误差主要取决于相机移动的精度和图像处理的精度,还与实验环境光强度大小有一定关系。
1)导轨移动过程中应保证整个装置的平稳性,较大的震动会对测量结果有直接的影响。
2)图像处理的精度对尺寸测量也有直接影响。在对图像阈值分割时,阈值是根据最佳分割效果手动选择的,虽可以保证分割效果,但也无法避免误差的产生。
3)本实验是拍摄经玻璃反射投影后的激光条纹,环境光线强度的变化会直接影响到条纹的清晰程度进而影响尺寸测量精度,因而拍摄高质量的条纹图像对测量尺寸精度至关重要。
5 结束语
本文在激光投影法的基础上,结合重叠玻璃投影特性的理论分析,并根据实验结果,提出了一种新的测量重叠玻璃平面尺寸的方法——基于激光反射投影原理的移动式测量方法。测量所得实验数据表明,这个测量方法对于重叠玻璃的平面尺寸测量具有可行性,能达到生产的精度要求。所提出的测量方法可适用于大尺寸物体的平面尺寸测量,但由于采用了移动式的测量方法,对于系统的平稳性提出了更高的要求(特别是在线连续性测量时)。同时控制好环境光,以免产生过多的干扰影响测量结果的精度。
参考文献:
[1]王 坚,任现君,苏建刚. 基于激光投影法的火炮身管内膛疵病深度测量[J]. 中国测试技术,2004(05):16-17,54.
[2]赵 斌,颜伟彬. 双光源投影法细丝直径测量[J]. 光学精密工程,2003(02):171-175.
[3]何 涛,李 明,等.一种利用玻璃反射特性的玻璃尺寸及装置测量方法[p].中国,CN106091862A,2016-11-09.
[4]何 涛,周伟松,等一种支架上的玻璃平面尺寸测量装置及方法[P].中国,CN106643511A,2017-05-10.
[5]刘金凤. 数码相机标定及相关技术的研究[D].重庆:重庆大学,2010.
[6] Park J B, Lee J G,et al. A glass thickness measuring system using the machine vision method[J]. International Journal of Precision Engineering and Manufacturing,2011,12(5):769-774.
[7]郭 超,马 麟.基机器视觉的尺寸测量方法研究[J].机械工程与自动化,2012(2):15-17.
