基于滑模控制的汽车主动换道避障研究
2018-07-03李印祥合肥工业大学汽车与交通工程学院合肥230009
李印祥, 王 凯(合肥工业大学 汽车与交通工程学院,合肥230009)
对于智能汽车而言,最重要的就是汽车主动安全技术.汽车主动安全技术是驾驶员在开车的过程中,汽车能够自主的判断周围环境中是否存在碰撞的危险,如果存在,首先通过声音或者震动提醒驾驶员,如果驾驶员仍然未进行操作,那么该系统可以主动的进行换道避障[1].奥迪公司开发了一种汽车换道辅助系统,该系统利用安装在车辆两侧的雷达传感器监测驾驶员换道过程中的安全状态,当汽车换道的过程中,目标车道后方有车辆快速驶来的时候,位于后视镜的LED灯就会亮起来提醒驾驶员,但是该系统并不会对驾驶员的操作进行干预[2].文献[3]介绍了一种基于模型预测的轨迹生成方法,并根据轮胎约束力最小化原则,提出一种轨迹跟踪方法,仿真表明该方法能够有效的进行主动换道避障.Haotian Cao等[4]提出一种综合纵、横向控制的汽车主动防碰撞系统,该系统集成了控制决策模块、路径规划模块、路径跟踪模块和纵向模糊自适应模块,最后模拟了汽车在直道和弯道的避障情况,仿真结果表明该系统在不同的场景下都有很好的表现.东京农业科技大学的Kou Iwano等[5]提出一种汽车换道避障中主动转向和驾驶员操作转向之间的分享控制策略,通过人机主权系数的分配实现主动转向和辅助转向之间的切换,并通过仿真验证了所提出方法的有效性.Hossein Jula等[6]对于汽车换道过程中可能发生的避障进行了分析,最后得出汽车安全换道的模型,并通过仿真验证其有效性.弗雷德里克大学的Stratis Kanarachos[7]提出一种基于神经网络的新型车辆前馈控制器的汽车避障控制方法,该方法是将一组优化的避障方式进行训练,最终得出最优的避障操作方式,并在MATLAB中进行了仿真测试.文献[8]、[9]提出一种汽车紧急避障时候通过施加随时间变化的制动力和方向盘转角,使汽车避障的效率最高,纵向避障距离最短.在对以上文献深入研究的基础上,提出一种综合车辆最大避障能力和稳定性的理想侧向加速度路径规划方法和基于滑模控制的路径跟踪方法,并通过仿真实验证明其有效性.
1 汽车动力学模型
对于汽车换道避障过程来讲,比较重要的参数包括换道过程汽车的侧向加速度、横摆角速度、轮胎侧偏角、前轮转角等,因此,对汽车模型进行部分简化[10]:
(1)忽略悬架系统的影响,即不考虑汽车在z轴方向的运动,认为汽车只做平面运动;
(2)汽车在换道的过程中,车速恒定,即不考虑汽车换道过程中速度的变化;
(3)汽车只有沿着y轴的侧向运动和沿着z轴的横摆运动这两个自由度;
(4)忽略左、右车轮在转向的过程中所产生的载荷转移和对回正力矩的影响.
针对以上假设,所简化的汽车模型如图1所示.

图1 汽车二自由度模型
图1中:V表示汽车的行驶速度;vx表示汽车速度在x方向的分量;vy表示汽车速度在y方向的分量;β表示汽车质心侧偏角;wr表示汽车横摆角速度;δ表示汽车前轮转角;L表示轴距;a表示质心到前轴的距离;b表示质心到后轴的距离;α1表示前轮的侧偏角;α2表示后轮的侧偏角;Fy1,Fy2分别表示前后轮所受到的侧向力.
由图1可以看出,汽车沿y轴方向上的合力与绕质心的合力矩为
(1)
假设前轮转角δ很小,上式可以写作:
(2)
β为质心侧偏角,β=vx/vy.ξ是汽车合速度与x轴的夹角,其值为
(3)
按照图1确定的坐标系,α1、α2的关系为
(4)
综上可得汽车运动方程可以写为
(5)
所以,车身运动线性二自由度动力学微分方程为
(6)
式中:k1,k2分别表示汽车前、后轮的侧偏刚度;Iz表示汽车绕z轴的转动惯量.
针对简化的汽车换道避障动力学模型,其模型参数如表1所示.
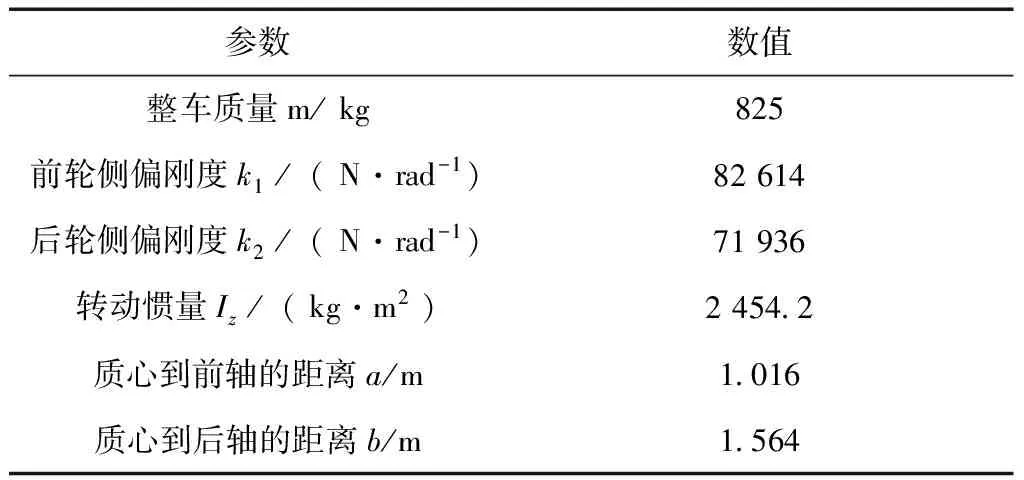
表1 1/2车辆模型参数表
2 安全状态判断
汽车在换道的过程中,最容易发生以下两种碰撞:第一种是由于换道的过程中,目标车道前方的车辆速度比较慢,自车的速度比较快,造成自车和目标车道前车发生碰撞;第二种是由于换道的过程中,目标车道后方有车辆以较快的车速驶来,会导致自车影响目标车道的车辆正常行驶,更严重可能发生碰撞.针对这两种可能发生碰撞的情况,必须要在汽车换道之前进行安全状态的判断.
如图2所示第一种换道场景:
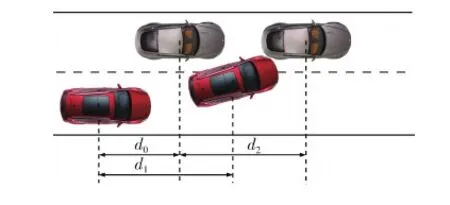
图2 第一种碰撞分析
图2中,自车开始换道时候距前车的距离为d0,在自车和目标车道车最可能发生碰撞的时候,自车行驶的距离为d1,前车目标车道前车行驶的距离为d2.假设自车与目标车道前车极限碰撞时刻为tc,如果要在此刻使自车不会发生碰撞,那么目标车道前车在自车开始避障时刻到tc时刻行驶距离应该大于换道开始时刻自车行驶的距离.则可得:
(7)
如图3所示第二种避障场景:
图3中,自车在开始换道时候距左后方车辆的距离为d0,在自车和目标车道车最可能发生碰撞的时候,自车行驶的距离为d1,目标车道左后方车辆行驶的距离为d2.假设自车与目标车道前车极限碰撞时刻为tc,如果要在此刻保证自车不会和后方车辆发生碰撞,那么目标车道左后方车辆在自车开始避障时刻到tc时刻行驶距离应该小于换道开始时刻自车行驶的距离,因此可得:
(8)
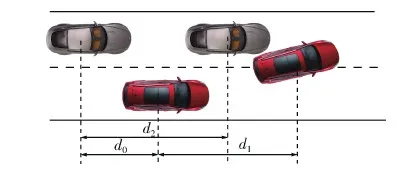
图3 第二种碰撞分析
3 基于滑模变结构的侧向换道控制
3.1 路径规划
为了便于分析换道过程中加速度的变化趋势,假设汽车在换道的过程中,侧向加速度满足一个正弦的变化规律[11],即车辆的侧向速度在汽车侧向位置达到0.5D的时候达到最大,根据对汽车侧向动力学的研究,一般认为汽车在良好路面上能够稳定行驶需要满足的侧向加速度要求为:aymax≤0.4g.如式(9)所示.
(9)
对侧向加速度进行积分,就可以得到侧向速度
(10)
当汽车稳态行驶的时候,假设汽车理想的横摆角速度和汽车的速度、加速度满足式(11)的关系:
(11)

3.2 路径跟踪
文中在考虑路径跟踪问题时,考虑到滑模控制能够通过对汽车实际横摆角速度的控制,实现对期望横摆角速度的快速跟踪,因此,设计滑模控制器进行路径跟踪[12-15].汽车在紧急换道避障的时候,要求汽车的横摆角速度能够迅速、精确的跟踪理想横摆角速度.定义汽车实际横摆角速度和理想横摆角速度偏差为
根据滑模控制规律,定义滑模面为

(12)

(13)
由于指数趋近律不仅能缩短趋近时间,并能使运动点达到切换面的速度很小,因此,使用指数趋近律设计滑模控制器,从而得:

(14)
式中:ξ、k为指数趋近律系数,且均大于0.
ξ系数影响系统抖振,k系数影响滑模面的趋近速率.通常为了保证快速趋近的同时削弱抖振,应增大k的同时减小ξ.
(15)
针对系统在滑模变结构控制下的稳定性问题,利用李亚普诺夫第二稳定判据加以证明.构造李亚普若夫函数为
求导可得:
(16)
将式(15)代入式(13)中得:

(17)
4 主动换道避障仿真
为了验证所提出的汽车主动换道避障控制策略的有效性,文中采用Carsim和Matlab进行联合仿真来验证.在Carsim软件中设置路面附着系数为μ=0.8的良好路面,选定一款C-Class级车型.Carsim的输出参数包括汽车的位置坐标、汽车的行驶速度和汽车的横摆角信息,输入参数为汽车的方向盘转角.仿真时,设置汽车分别以10 m/s、20 m/s、30 m/s的恒定速度进行了避障路径跟踪测试,仿真结果如图4所示.
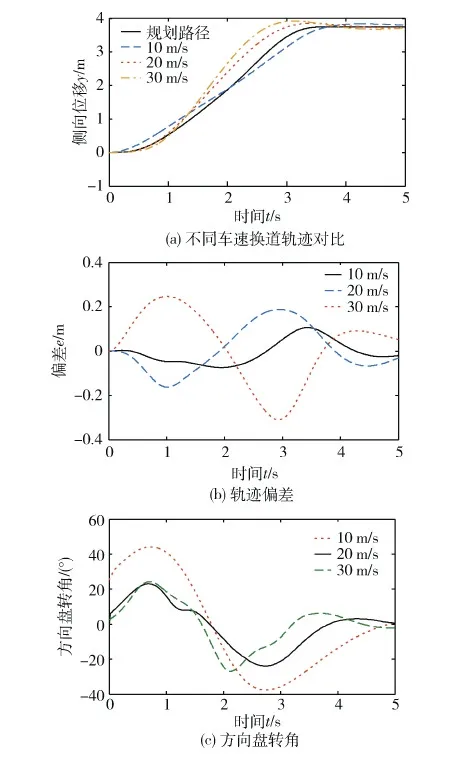
图4 不同车速仿真对比
从图4(a)中可以看出,随着车速的增加,控制器的调节滞后现象越来越明显,汽车的实际轨迹和规划的理想轨迹之间的偏差逐渐增大,但是从图4(b)中可以看出,最大的偏差也只有0.3 m左右,满足轨迹跟踪的效果.图4(c)是汽车在换道避障过程中方向盘转角的变化,从图中看出方向盘转角在这个过程中变化平稳,未出现突变.
5 硬件在环试验
根据实验室现有条件确定了基于NI公司开发的PXI-1042Q实时系统,同时与汽车动力学仿真软件Carsim联合构成汽车主动避障控制系统的硬件在环试验台,在Carsim软件中建立整车动力学模型,并建立汽车避障场景,在Labview中搭建汽车主动换道避障控制程序,而对于该过程比较重要的转向系统则采用实物的方式,采用CAN总线收发器接收方向盘转角传感器的CAN信号,并将计算出的期望方向盘转角通过控制器控制方向盘实现期望的转角,并通过转角传感器实现闭环控制.总体方案如图5所示.
图5 硬件在环图
硬件在环试验时,在Carsim中设置汽车初始速度为20 m/s,路面附着系数为μ=0.8的良好路面.硬件在环试验结果如图6所示.
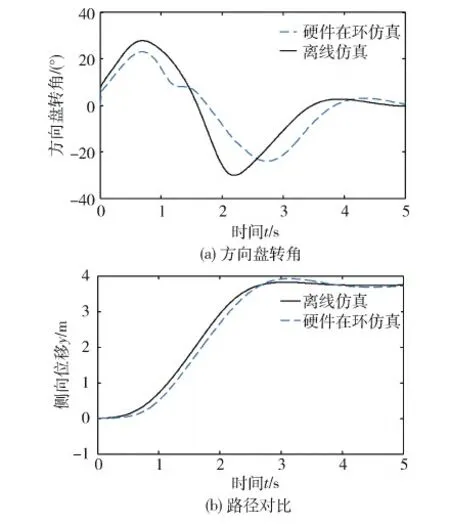
图6 离线仿真和硬件在环试验对比
从图6(a)中可以看出,硬件在环试验的方向盘和仿真时候的方向盘转角由于加入实际的转向机构,可能由于转向电机响应时间存在延迟或者存在阻力的原因,硬件在环试验的方向盘转角和仿真的时候存在一定的延迟和滞后,但是基本保持一致.从图6(b)中可以看出硬件在环试验的路径和仿真的路径都具有良好的跟踪效果.
6 结 论
1)在考虑汽车主动安全方面,提出一种汽车主动换道避障系统.该系统能够在驾驶员遇到障碍物没有进行操作的时候,主动的进行干预,使汽车保持安全行驶状态.
2)汽车主动换道避障的轨迹规划问题上,采用一种基于理想侧向加速度的轨迹规划方法,该方法能够使汽车快速的完成换道避障,而且还可以保持换道过程的稳定性.
3)最后采用一种基于滑模控制的换道轨迹跟踪方法,仿真和硬件在环试验表明,该方法可以有效地使汽车完成主动避障过程.
参考文献:
[1] 张 臣. 汽车主动安全技术概况[J]. 卷宗, 2017(21):210.
[2] 路明辉. 奥迪Q7驾驶辅助系统之换道辅助系统[J]. 汽车电器, 2008(10):25-32.
[3] Yoon Y, Shin J, Kim H J, et al. Model-predictive active steering and obstacle avoidance for autonomous ground vehicles[J]. Control Engineering Practice, 2009, 17(7):741-750.
[4] Cao H T,Song X L,Huang Z Y,et al. Simulation research on emergency path planning of an active collision avoidance system combined with longitudinal control for an autonomous vehicle[J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2016, 230(12):1624-1653.
[5] Kou I, Raksincharoensak P, Nagai M. A Study on Shared Control between the Driver and an Active Steering Control System in Emergency Obstacle Avoidance Situations[J]. Ifac Proceedings Volumes, 2014, 47(3):6338-6343.
[6] Jula H, Kosmatopoulos E B, Ioannou P .Collision avoidance analysis for lane changing and merging[J]. IEEE Transactions on Vehicular Technology, 2000, 49(6):2295-2308.
[7] Kanarachos S. A new min-max methodology for computing optimised obstacle avoidance steering manoeuvres of ground vehicles[J]. International Journal of Systems Science,2014,45(5):1042-1057.
[8] Singh A, Singh P, Nishihara O. Obstacle Avoidance by Steering and Braking with Minimum Total Vehicle Force[J]. Ifac Papersonline, 2016, 49(19):486-493.
[9] Hattori Y, Ono E, Hosoe S. An optimum vehicle trajectory control for obstacle avoidance with the shortest longitudinal traveling distance[C]// IEEE International Conference on Mechatronics and Automation. IEEE, 2009:13-20.
[10] 余志生,汽车理论[M]. 北京:机械工业出版社, 2009.
[11] 田彦涛, 王晓玉, 胡蕾蕾,等. 电动汽车侧向换道行驶主动避撞控制算法[J]. 吉林大学学报(工), 2016, 46(5):1587-1594.
[12] 刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京:清华大学出版社, 2015.
[13] 张冠哲, 任殿波, 崔胜民. 智能交通系统车辆换道四轮转向控制[J]. 大连海事大学学报, 2011(3):81-84.
[14] 任殿波, 张继业, 张京明,等. 智能车辆弯路换道轨迹规划与横摆率跟踪控制[J]. 中国科学技术科学, 2011, 41(3):306-317.
[15] 任殿波, 张京明, 崔胜民,等. 车辆换道纵横向耦合控制[J]. 交通运输工程学报, 2009(3):112-116.
