AMT系统干式离合器自动控制策略研究
2018-07-03史湧杰同济大学汽车学院上海201804
史湧杰(同济大学 汽车学院, 上海 201804)
离合器起步控制是AMT控制系统技术难点之一,由于在车辆起步过程中面临着多元化的驾驶意图、复杂的行驶路面和工况、车辆重量变化等因素的影响,起步时离合器接合控制需要保证发动机不熄火,同时追求快捷平顺的车辆起步[1].
1 车辆起步动力学分析
如图1所示,假设坡道路面良好以及车轮不打滑,起步过程中车速为零,依靠离合器的逐渐接合摩擦,传递发动机的驱动扭矩,从而完成车辆的动力衔接过程.在起步过程中车辆受到驱动力、制动力、加速阻力、滚动阻力和坡道阻力的综合作用,它们之间的相互关系可以描述为[2]
Mt=Mg+Mf+Mi+Mj,
(1)
式中:Mt、Mg、Mj、Mf、Mi为车体上的驱动力、制动力、加速阻力、滚动阻力、坡道阻力,N·m.
在起步过程的不同阶段,车辆纵向动力学满足不同关系:
(1)离合器消除其主、从动部分的间隙过程,传递的离合器扭矩为零,此时车辆还处于静止状态,制动力矩等于车辆的坡道阻力矩,满足公式:
Mg=Mf+Mi.
(2)
(2)离合器开始摩擦传递发动机扭矩,但是尚不足以克服车辆阻力,此时车辆仍然保持静止状态,车轮的力矩平衡方程式如下:
Mt+Mg=Mf+Mi.
(3)
(3)随着离合器接合的逐渐深入,离合器传递的发动机驱动扭矩逐渐增加,当驱动扭矩大于坡道阻力和摩擦阻力矩的合力矩时,车轮的力矩平衡方程式如下:
Mt=Mg+Mf+Mi.
(4)
(4)此时制动力逐渐解除,车辆开始出现运动车速,离合器主从动部分的转速差渐渐缩小,离合器完全接合后车辆起步过程完毕.此时
Mt=Mf+Mj+Mi.
(5)
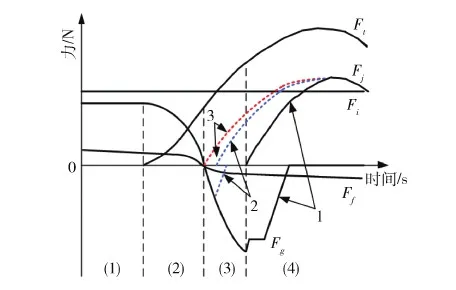
图1 车辆受力变化趋势
在车辆坡道起步过程中,解除制动力的时刻非常重要,在阶段(4)中制动力解除时间偏晚,如曲线1部分,车辆已经处于向前运动的状态,制动力成为阻力会导致离合器的滑摩负荷加大,不利于离合器的使用寿命;在阶段(3)中制动解除时刻正常,如曲线2部分顺利完成了车辆动力的交接,车辆顺畅起步;在阶段(1)、(2)中制动解除过早,如线3部分,这时离合器传递的摩擦扭矩还不足以克服车辆受到的坡道阻力,如果此时解除制动力矩,车辆可能会出现溜车的现象.
2 离合器操纵系统温度特性研究
为了实现车辆起步过程自动化控制的同时追求快速性和舒适性,AMT系统需要精确控制离合器的接合与分离,因此,需要对离合器操纵系统特性进行分析研究.
AMT系统采用电控液动的干式离合器,其中离合器操控油缸电磁阀采用比例流量阀,额定电阻为2.5欧姆,功率为5瓦.设定一组不同的温度,将10个样本流量比例电磁阀放置于不同环境温度下,其电阻测量值如图2所示.可以看到,随着环境温度的升高而电磁阀电阻会明显变大.因此,在同一占空比下,随着电磁阀散热或环境温度变化引起电磁阀电阻变大,导致电磁阀的控制电流变小,阀口开度面积变小,最终导致操控油缸流量变化,严重影响离合器控制的一致性[3].
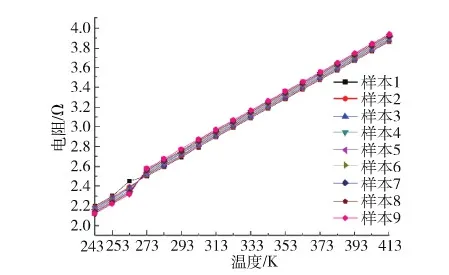
图2 不同温度下比例流量电磁阀电阻
为了实现对离合器的精确控制,在不同温度下对离合器操纵系统进行测试,数据如图3所示.AMT系统中离合器起步控制的重点在于精准控制离合器的接合过程,为了确保不同温度下离合器接合过程控制的一致性,采用试验建模查表的方式获得不同温度下离合器控制参数.
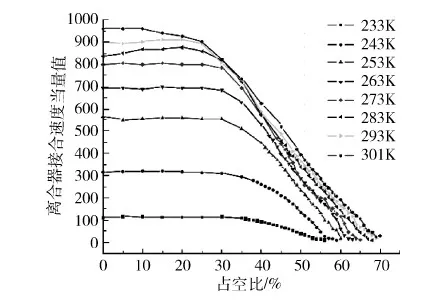
图3 不同温度下离合器操控系统接合速度
3 离合器起步过程评价指标
车辆的起步过程是一个动态连续的过程,一个良好的车辆起步过程可以充分反映驾驶员意图、并具有快捷和舒适的优点,因此,离合器起步过程评价指标主要包含:起步时间、滑摩功、冲击度.
在车辆的起步过程中,离合器经历从动力中断状态、滑摩状态、到完全接合状态,其中,在起步过程的滑摩功可由如下公式表示:
(6)
式中:W表示离合器接合过程的滑摩功,J;t0表示离合器主、从动盘开始接触滑摩的时刻,s;t1表示离合器从动盘开始出现转速的时刻,s;t2表示离合器主、从动盘转速同步的时刻,s;Mc(t)表示离合器起步过程中传递的摩擦转矩,Nm;ωe(t)表示发动机飞轮盘的角速度,rad/s;ω1(t)表示离合器从动盘的角速度,rad/s.
此外,在离合器接合过程中,乘客的乘坐舒适性通常使用冲击度指标来衡量,其表达式如下:
(7)
式中:ω1为变速器输入轴角速度,rad/s;ω2为变速器输出轴角速度,rad/s.
离合器起步过程的快捷性一般凭借离合器的接合时间来评价,所以车辆起步过程追求的最优指标就是在最短的起步时间内使得离合器接合过程所产生的冲击度和滑摩功最小,也即是确保起步品质的快捷性、舒适性和耐久性.
4 离合器起步控制策略
车辆从静止起步时离合器的接合过程一共可以分为3个阶段[4-6]:消除空行程、滑摩过程和同步过程.针对这3个阶段并结合离合器起步效果的评价指标(起步时间、滑磨功、冲击度等)来分析,在消除空行程阶段由于离合器不传递扭矩,只是消除分离轴承和膜片弹簧之间的间隙,为了缩短离合器接合时间,一般采取离合器快速接合的控制方式;在滑磨过程阶段,为了确保离合器能够平稳传递发动机的扭矩,一般采取离合器平稳缓慢接合的控制方式;在同步过程阶段,离合器主从动部分的转速差消失,转速同步从而使得滑摩功为零,此阶段采用离合器快速接合的控制方式.在离合器接合的不同阶段的衔接阶段,需要确保离合器接合速度的平稳过渡,防止离合器接合速度的超调,从而引起离合器传递的摩擦扭矩突变.
根据以上离合器特性分析,提出依据驾驶员意图的离合器控制策略,如图4所示.
由于发动机采用的是全程调速的柴油机,发动机可以根据油门开度,调节喷油量从而自适应不同负载情况下的稳定转速控制.因此,不同油门开度对应着不同发动机转速.图4的控制策略图里提到的参考模型即为根据油门开度的发动机特性图,输入为油门开度,输出为发动机参考转速.控制器通过发动机实际转速与发动机参考转速的误差和误差变化率来产生电磁阀的控制信号kp,从而完成离合器的自动起步控制.
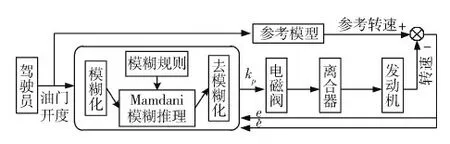
图4 离合器起步过程控制策略
令neref为驾驶员油门开度下发动机参考转速,r/min;neact为当前发动机实际转速,r/min.则控制误差e可表示为
e=neref-neact.
(8)
选择三角函数作为控制变量的隶属函数曲线如图5所示,在确定物理论域和模糊论域后,将输入信号模糊化,即通过隶属函数将物理论域的精确输入量映射到模糊论域上.一般地,隶属函数为单峰函数,在论域上的分布位置上的重叠率取0.2~0.6为宜.
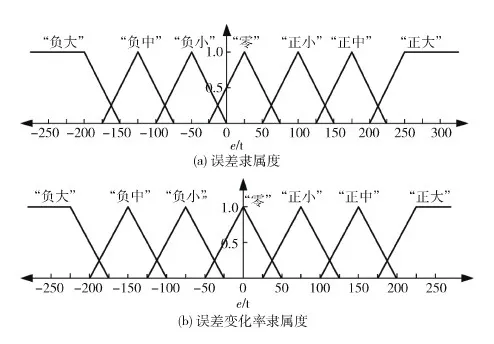
图5 误差及其变化率的隶属度函数
当误差变化率大时,主要根据误差方向来选择控制量,如误差有增大的趋势,为尽快消除已有的误差并抑制误差的继续扩大,应选取负向较大的控制量;当误差为负,但误差变化率为正时,由于系统自身惯性具有减少误差的运动趋势,为了提高系统响应过程的稳定性,降低超调,因此,宜选取较小的控制量,具体推理规则如表1所示.
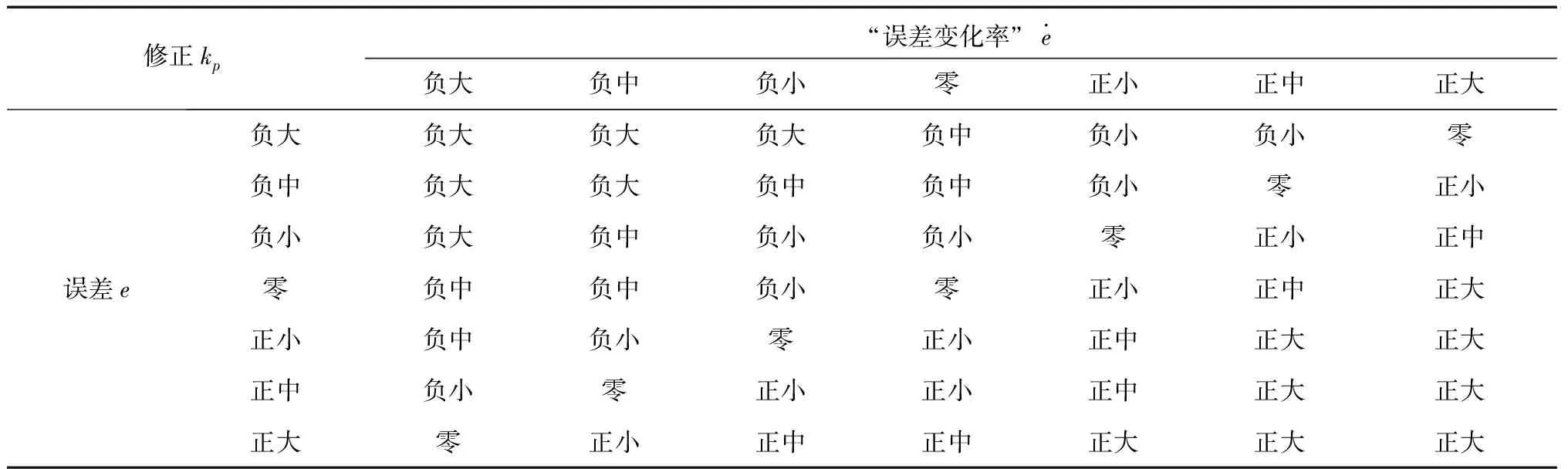
表1 kp的控制规则
基于图中离合器自动起步的控制策略,在AMT系统车辆上进行水泥平路和小坡道离合器起步试验,试验数据如图6所示.
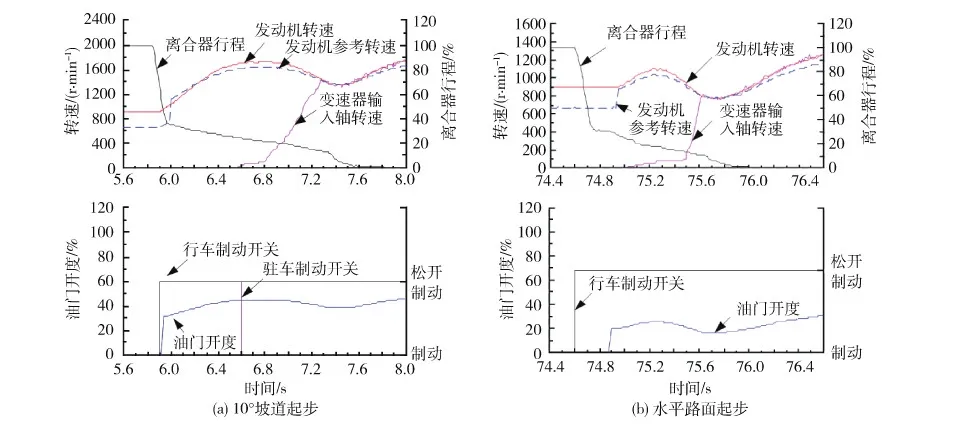
图6 离合器起步试验数据

5 结 论
针对AMT系统离合器起步过程的车辆动力学进行分析,将车辆当作质点分析了离合器起步过程中车轮的受力情况以及力学变化趋势;其次,在不同温度下进行离合器操纵系统试验,探索了温度对离合器操纵系统的影响;最终提出了基于模糊规则的离合器起步控制策略并进行实车试验,试验结果证明离合器起步控制策略的正确性和有效性.
参考文献:
[1] 陈 俐,张建武.自动离合器的自适应最优控制[J].上海交通大学学报,2000, 34(10):1312-1316.
[2] 王洪亮,刘海鸥,赵熙俊,等. 基于流量阀的自动操纵机构的AMT离合器改装研究[J].汽车工程,2011, 33(1):47-51.
[3] 宫文斌,刘昕晖,孙延伟. 电液比例PWM控制方法[J]. 吉林大学学报,2003, 33(3):104-106.
[4] 张 辉. 重型车电控机械式自动变速器执行机械的研究与开发[D]. 重庆: 重庆大学, 2007.
[5] 雷雨龙, 葛安林, 李永军. 离合器起步过程的控制策略[J]. 汽车工程, 2000, 22(4): 266-281.
[6] 黄建明, 曹长修, 苏玉刚. 汽车起步过程的离合器控制[J]. 重庆大学学报(自然科学版), 2005, 28(3): 91-94.
