独立电驱动车辆复合转向技术研究
2018-07-03冯付勇王东亮赵艳辉中国北方车辆研究所北京100072
冯付勇, 王东亮, 赵艳辉(中国北方车辆研究所,北京 100072)
最小转向半径是表征车辆机动性的重要指标,它反应了车辆灵活运动和克服障碍的能力[1].近年来,许多学者提出了不同的减小轮式车辆转向半径的方式,例如差速转向方案或多轴转向方案[2].差速转向虽可实现小半径转向,甚至可实现原地转向,但存在轮胎磨损严重,操纵稳定性难以习惯等突出问题[3].多轴转向同样可降低车辆最小转向半径,但需要增加转向机构,造成转向机构复杂、高速操纵稳定性难以控制等问题.
文章针对轮式6×6轮毂电机驱动平台,提出了一种复合转向方案:低速时,以最小转向半径为目标,采用复合转向;高速时,以提升车辆操纵稳定性为目标,采用前桥几何转向.同时,针对复合转向,提出了一种基于最小转向半径的差速匹配模型,并进行了数值解析.
为验证方案的合理性,基于Adams软件,建立了仿真模型,对复合转向策略进行了仿真验证.结果表明:复合转向可有效减小车辆的转向半径,提升车辆的机动性能.为复合转向理论提供技术支撑.
1 转向系统控制结构
1.1 转向系统结构原理
文中研究的平台为6×6轮毂电机独立驱动平台,转向系统采用前桥电助力转向,系统结构如图1所示,主要包括转向节臂1、转向副横拉杆2、转向摇臂3、转向主横拉杆4、电动转向器5、立轴6等组成.电动转向器主要包括转向伺服电机、减速机构、角度传感器等.转向系统工作原理为:转向控制器通过CAN总线接收上位机转向指令,根据控制策略发出控制指令,驱动转向伺服电机工作,电动转向器驱动转向摇臂转动,转向摇臂经转向拉杆、转向节臂,最终推动车轮,实现转向.角度传感器采集当前转向角度信息并反馈给转向控制器,形成闭环控制.
复合转向是将传统轮式车辆依靠转向机构几何转向与履带式车辆差速转向(也称滑移转向)相结合的一种转向方式,也有文献称为双重转向式[4-5].复合转向模式下,转向控制器读取上位机转角、车速等信号,在几何转向的同时,通过匹配轮毂电机速差,以获得较小的转向半径.
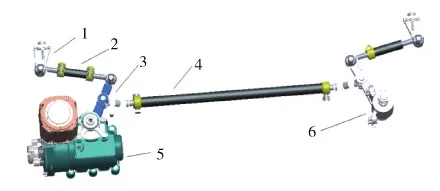
图1 转向系统结构图
1.2 系统控制结构
转向系统通过控制策略可实现助力转向、复合转向、原地转向3种转向模式.助力转向模式即前桥几何转向,适用于车速较高情况;复合转向模式,此时转向半径最小,转向机动性强;原地转向即转向半径为零的转向,此模式由电机差速实现.3种模式的判断依据为车速和转角信号,其阈值可具体设定.
1.3 模型建立
目前,对轮毂电机驱动车辆采用的差速控制多是基于阿克曼转向模型[6].该模型作为车辆一种理想的行驶状态,基于几个假设条件:①车体为刚性;②车轮作纯滚动运动,即忽略滑转、滑移等运行状态;③行驶过程中所有轮胎都未脱离地面;④不考虑轮胎材质与结构上的非线性和由于离心力使轮胎垂直载荷发生变化对轮胎产生的影响.虽然该模型存在较大的限制,但对于车辆低速转向情况下有较好的参考价值[7].文中研究的平台最大速度为60 km/h,因此,据此理论建立转向差速模型,如图2所示.图中,B为两侧主销轴线与地面相交点之间的距离;L1、L2、L3为瞬心到各轴的垂向距离;R1in、R2in、R3in为各轴内侧车轮转向半径;R1out、R2out、R3out为各轴外侧车轮转向半径;α为前桥外侧车轮转角;β为前桥内侧车轮转角;x、y分别为瞬心到内侧车轮、质心的距离.

图2 差速匹配模型
由以上假设可知:
(1)
设m、n分别为前后轴轴距,令R1out=R,由几何关系可得:
(2)
由式(1)、(2)可得:
(3)
由相似推导,可得:

(4)
(5)

(6)
(7)
由以上公式可以看出,各轮的角速度与轮距、轴距、转向半径、转角有确定的函数关系.轮距、轴距参数是整车参数,为常数.转向控制器接到的上位机指令一般为曲率或转角,车速信号可由总线读取.因此,利用阿克曼差速转向模型,就可得到各轮间的差速匹配关系.
1.4 模型仿真
为验证以上理论,利用ADAMS平台,建立了仿真模型,对复合转向策略进行了仿真验证.差速匹配关系依据上节中的解析公式,仿真所用整车参数如表1所示,仿真结果如图3~6所示.
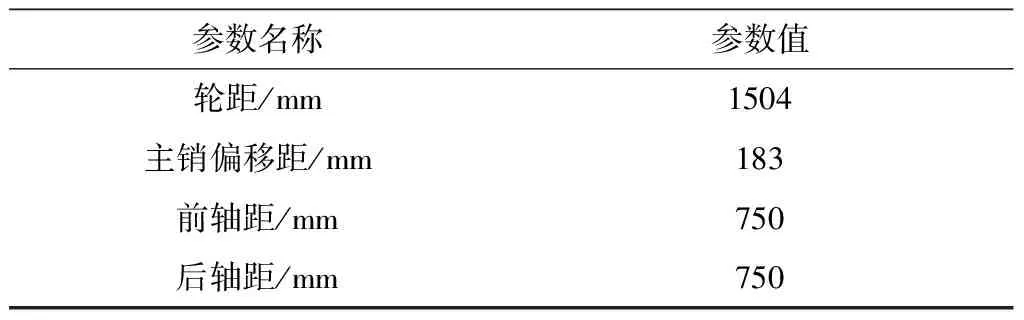
表1 整车部分参数表
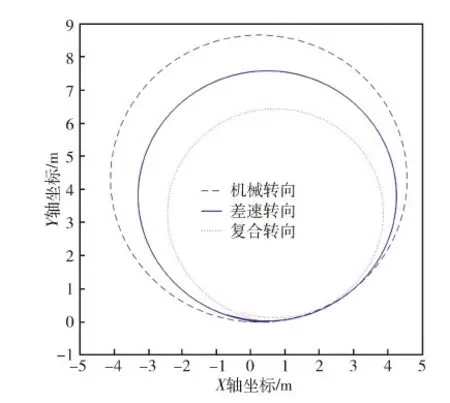
图3 相同车速不同转向模式转向半径对比
图3为车轮最大转角为30°时的转向半径对比曲线,可以看出:几何转向时转向直径为8.2 m,差速转向时转向直径为7.4 m,复合转向时转向直径为6.2 m;复合转向相比于几何转向,转向直径减小24%,有效提升了转向机动性.
由图5、图6、可以看出:增大外侧车轮与内侧车轮速差可有效减小车辆的转向半径;但转速相差过大会造成车辆侧滑,故要选择合适的转速比范围;外-内侧车轮转速比在1.3~1.6时,既可使车辆转向半径较小,又能保证车辆的稳定性.
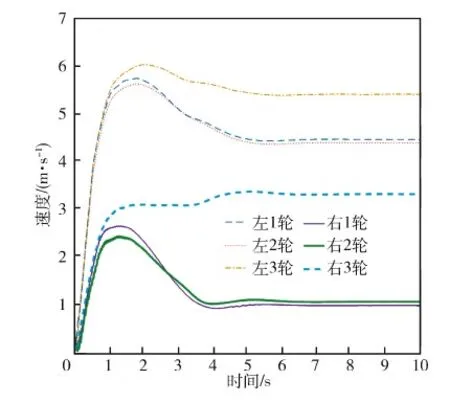
图4 复合转向时各轮速度
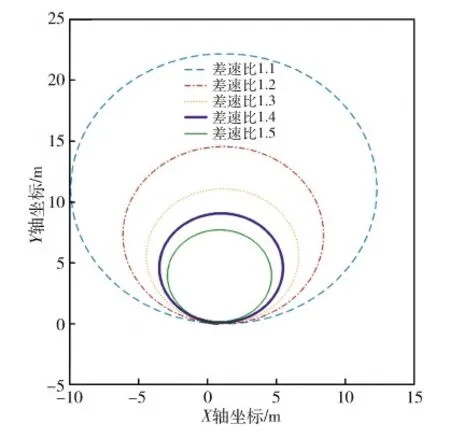
图5 不同差速比转向半径
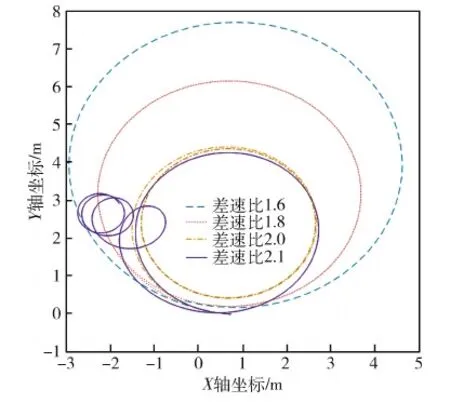
图6 不同差速比车辆稳定性
3 结 论
文章针对轮式6×6轮毂电机驱动平台,提出了一种复合转向方案,为验证方案的合理性,建立了Adams仿真模型,对复合转向策略进行了仿真验证.文章研究成果可为独立电驱动平台的复合转向技术提供理论支撑,为分布式电驱动平台控制提供参考及依据.
参考文献:
[1] 胡纪滨,付苗苗,李雪原,等. 多轴机电复合分布式驱动车辆转向半径模式控制策略[J].北京理工大学学报,2016, 36(11):1131-1135.
[2] Fauroux J C,Vaslin P. Modeling, experimenting, and improving skid steering on a 66 All-Terrain mobile platform[J].Journal of Field Robotics,2010,27(2):107-126.
[3] 翟 丽,董守全,罗开宇.四轮毂电机独立驱动车辆转向电子差速控制[J].北京理工大学学报,2010, 30(8):901-905.
[4] 范晶晶,罗禹贡,张海林,等. 全轮独立电驱动车辆双重转向控制策略的研究[J]. 汽车工程,2011,33(5):369-372.
[5] 阳贵兵,马晓军,廖自力,等. 轮毂电机驱动车辆双重转向直接横摆力矩控制[J]. 兵工学报,2016,37(2):211-218.
[6] 周 勇,李声晋,田海波,等. 四轮毂电机电动车的电子差速控制方法[J].电机与控制学报,2007,11(5):467-471.
[7] 毛英慧,靳光盈,李新伟,等.轮式电动车转向差速控制方法[J].电机与控制应用,2016,43(3):74-78.
