水田土壤上典型步态及其参数对足式机器人能耗的影响
2018-06-29章永年何春霞
朱 鹏 章永年 何春霞 卢 伟
南京农业大学工学院,南京,210031
0 引言
足式机器人具有越障能力强、移动方位可全方位调整、地形适应能力强、运动灵活性好等优点[1⁃3],应用于农田作业时具有对土壤机械压实作用小、对作物损害轻、出现故障时易撤离现场等特点,近年来被广泛研究。IIDA等[4⁃5]在研制的六足机器人上搭载风速仪和气体传感器,用于检测农田风速及CO2气体;美国伊利诺伊大学开发的“watching⁃dog robot”[6]采用柔性的联动悬架来适应复杂地形,并配备了摄像机和GPS定位器记录作物生长信息以及田间杂草信息;荣誉等[7]将并联机构用于六足机器人的腿部结构,使其可以用于山地、林地、丘陵等环境的农业运输、种植、采摘等;MANIKANDAPRABU等[8]设计制造了一种四足施肥机器人,该机器人可以通过良好的控制动作有效地通过各种障碍物,进行肥料喷洒。
足式机器人通过自身携带的有限动力源提供其工作所需的能量,因而其能耗大小决定着机器人的作业时间和效率。探究足式机器人在不同影响因素下的能耗规律,可以为足式机器人的本体设计和运动规划提供依据。李军等[9]研究了步幅、步频和扭矩与能耗的关系;韩宝玲等[10]研究了四足机器人腿型配置对能耗的影响;马宗利等[11]设计出一种大腿与小腿呈一体化的柔性节能腿结构。目前足式机器人能耗问题虽被广泛研究,但主要集中在其自身机构及运动参数上,且默认工作环境为硬质路面,忽略了机器人所处路面环境对能耗的影响。
在我国粮食主产区的南方农区,耕地的80%是水田[12],但目前国内外对水田土壤上足式机器人运动的技术研究很少,且多数集中在设备研发方面,如吉林大学先后研制出一系列非常规行走机构:轮脚可转换式步行轮、谐波叠加式步行轮、新型机械传动式步行轮、四足步行机耕船等。陈勇[13]采用高速摄像技术分析了黄牛行走时的运动步法及步态特点,建立了黄牛在水稻田上行走时的运动学方程,设计了仿黄牛行走机构。然而,由于动物与足式机器人在结构、驱动、自由度等方面存在较大差异,简单通过仿生试验对机器人步态进行规划无法保证对各种腿部结构机器人都具有普适性。
基于此,本文针对自主设计的平面双四杆腿结构,运用ABAQUS建立单腿模型和土壤模型,进行有限元动力学仿真,探究4种典型步态及其步态参数对足式机器人单位能耗的影响,为农田足式机器人步态规划提供科学依据。
1 机械腿与土体有限元模型
1.1 机械腿结构
腿部机构作为足式机器人的关键部件,其自由度、布局形式、自重等都对机器人运动性能有较大影响。减小腿部质量或改善腿部质量分布可以减小腿部转动惯量,有利于提高机器人的动态性能[14],因此,用轻质材料设计一种平面双四杆机构,将驱动电机布置在机器人机身上。机械腿由曲柄摇杆机构和双摇杆机构构成。曲柄摇杆机构带动髋关节处摇杆转动能带动大腿转动,双摇杆机构带动膝关节处摇杆转动,从而带动平行四杆机构摆动,实现小腿上下摆动。图1、图2为机械腿三维模型及结构简图,机械腿结构参数见表1。
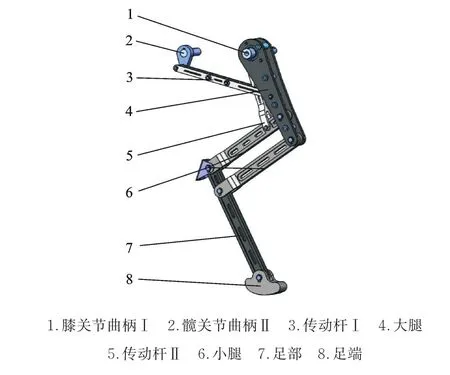
图1 机械腿腿部模型Fig.1 Designed robot leg
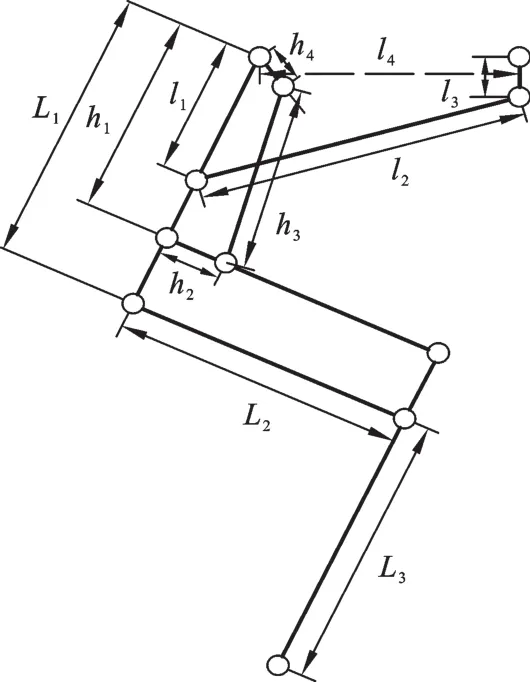
图2 机械腿结构简图Fig.2 Sketch of mechanical leg structure
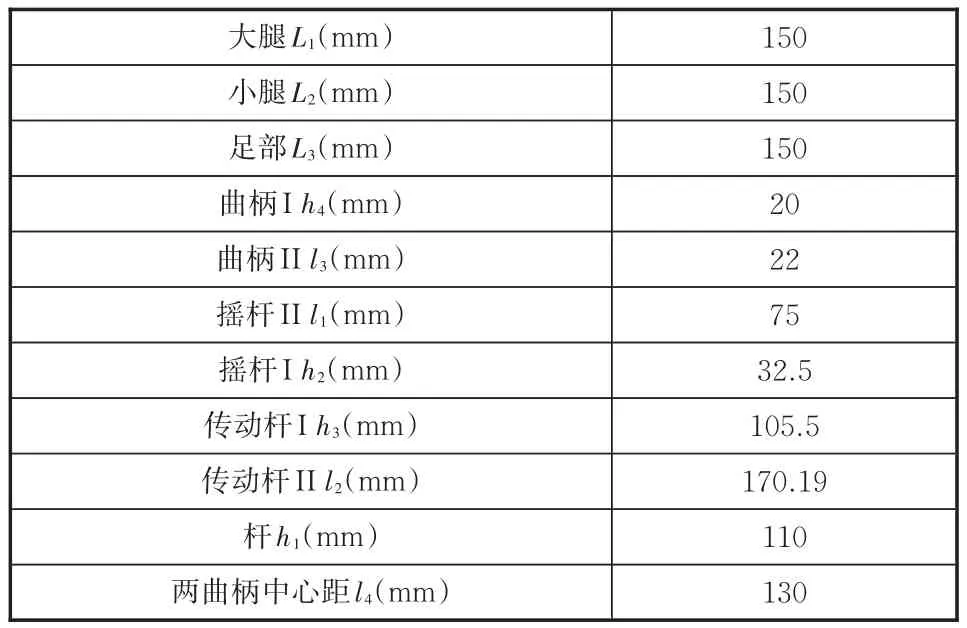
表1 机械腿腿部参数Tab.1 Dimension parameters of leg
1.2 Drucker„Prager模型及试验土壤参数
机器人在水田环境下行走时,土壤与机械之间的相互作用是非常复杂的力学问题[15],具有高度非线性。本文采用ABAQUS建立机械腿和土壤的有限元模型进行动力学仿真,探究4种典型步态及其参数对能耗的影响。因足式机器人的腿部运动具有相似性,故本文只取其中的一个腿部作为研究对象。
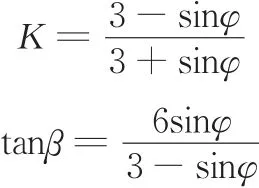
本文用Drucker⁃Prager模型建立土壤模型。Drucker⁃Prager模型具有参数少、形式简单[16]、可以模拟材料的长期非弹性变形的特点,适合于模拟试验中土壤的非弹性变形过程。Druck⁃er⁃Prager模型有5个参数,分别为黏聚力c、摩擦角φ、弹性模量E、K、β。黏聚力c、摩擦角φ由直接剪切试验测得量计算,弹性模量可由室内承载板法测得,K与β可由φ求得,相关关系如下:
取水田土壤,利用等应变直剪仪和室内承载板法测得土壤参数(表2)
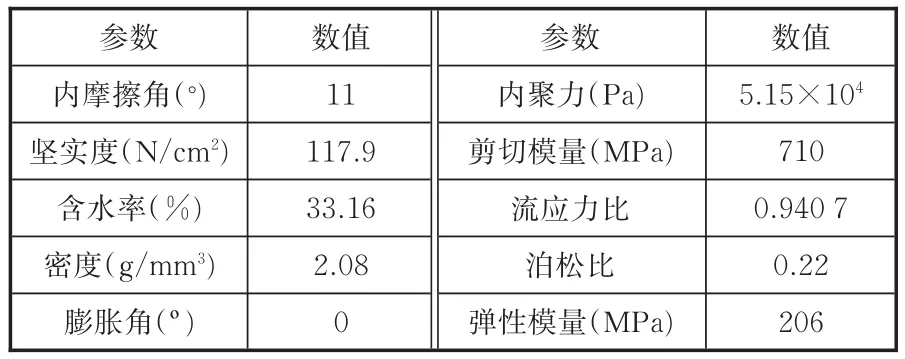
表2 水田土壤参数Tab.2 Soil parameters
1.3 机械腿与土体有限元模型
选用ABAQUS/Explicit算法。设置单元类型为减缩积分,使网格在扭曲变形时不会对求解精度产生影响,且在弯矩作用下单元不易发生剪切自锁。土壤模型选用八节点线性六面体单元(C3D8R),采用结构划分,机械腿视为刚体,选用四节点线性四面体单元(C3D4),采用自由划分。采用增强型沙漏控制,位移沙漏系数为1。机械腿和土壤共划分62 424个单元,29 006个节点,其中六面体单元14 040个,四面体单元48 384个。划分后机械腿和土壤的装配模型见图3。
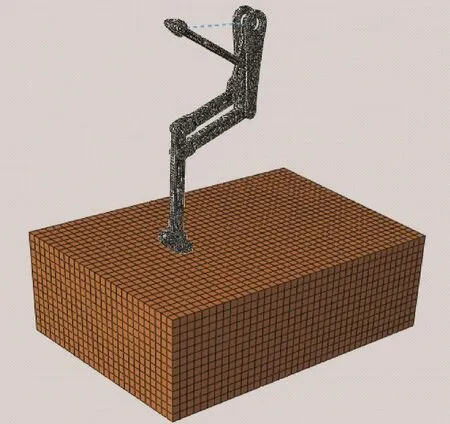
图3 装配模型Fig.3 Assembly model
1.4 机械腿与土壤的相互作用关系
机械腿杆件采用铰接,各杆件之间能发生相对转动,不允许相对位移,因此只设定1个旋转自由度UR1,其他5个自由度均被约束,膝关节与髋关节为主动自由度,采用MPC约束中的PIN约束,以各自参考点的节点自由度为标准值,约束关节的运动。机械腿材料为6061铝合金,弹性模量约为土壤弹性模量300多倍,因而机械腿各部分均设定为刚体单元,它们之间接触为无摩擦。机械腿足端与土壤模型之间接触碰撞变形包括法向接触和切向滑移,接触为面⁃面接触,机械腿足端与土壤之间摩擦类型为库仑摩擦[17]。机械腿设定约束使其只能在竖直平面内运动,同时对土壤模型下表面设定完全约束,两对侧面设定对称约束,以保证土壤侧面不滑移。
2 机械腿仿真试验及验证
2.1 机器人单位能耗仿真试验
机器人单位能耗
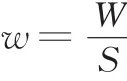
式中,w为单位能耗,J/mm;W为单周期内消耗总能量,J;S为步长,mm。
影响机器人能耗的因素很多,主要包括结构参数和步态参数等[18⁃19],由于机器人在土壤中行走时需避免足端对土壤产生较大变形,使关节受力过大,本仿真试验选用矩形轨迹[20]、零冲击轨迹[21]、修正摆线轨迹和椭圆轨迹[22]。足式机器人步态参数包括步长、步高、步速等,本文只选取其中2个典型步态参数步长和步高进行研究。4种步态轨迹见图4。
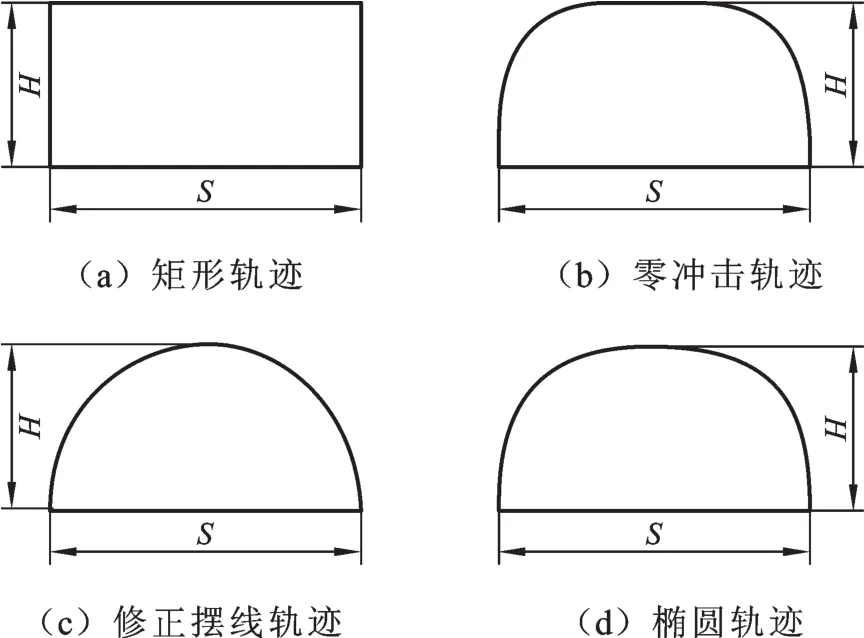
图4 四种足端轨迹Fig.4 Delineation of four foot trajectories
根据机械腿的工作空间,取步长S为60~240 mm,步高 H 为 30~70 mm,周期 T=1.2 s。仿真能耗试验设计单周期内几种步态在步高H=40 mm时,步长S分别为60 mm、96 mm、132 mm、168 mm、204 mm、240 mm时的仿真试验,并根据仿真结果选取单位能耗最低的步长,在该步长下步高分别选择30 mm、40 mm、50 mm、60 mm、70 mm进行步高对比试验。另设计4组土槽试验与仿真试验,以验证仿真试验,2种试验4种步态均设定T=2.4 s、步长为130 mm、步高为50 mm。
2.2 机器人行走仿真试验
图5和图6为单周期机械腿的仿真效果图。图5、图6可以看出,机械腿实现了抬腿出土、腾空、入土、触地4个过程,由于椭圆、零冲击、修正摆线步态轨迹大致相同,故仿真效果只选取矩形步态和椭圆步态展示。矩形步态与椭圆步态分别以向上直线和曲线运动到最高点,图5b和图6b为2种步态在t=T/8时的腿部相位,其中矩形步态足端与足迹上下正对,椭圆步态足端与足迹有一定的偏移量,表明足端按预定轨迹运动。
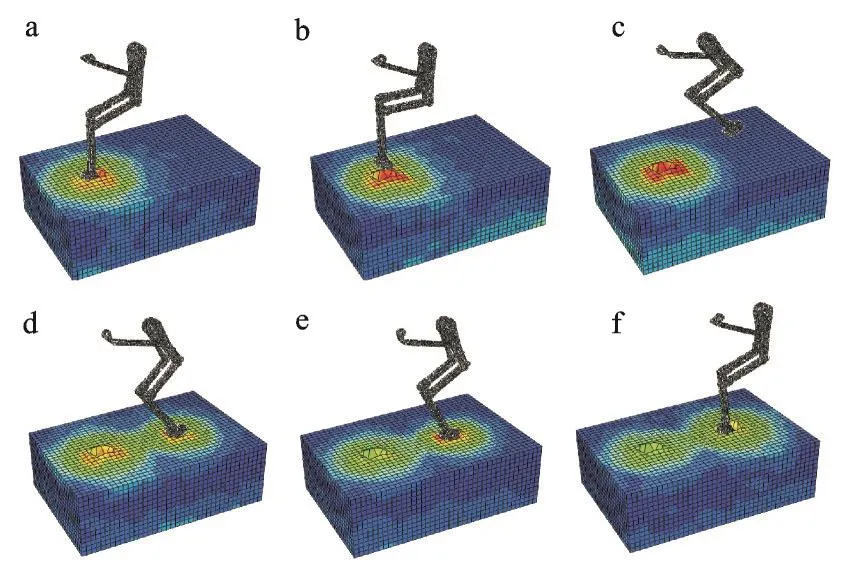
图5 矩形轨迹单周期仿真效果图Fig.5 The simulation rendering of rectangular gait in a cycle

图6 椭圆轨迹单周期仿真效果图Fig.6 The simulation rendering of elliptical gait in a cycle
图7所示为不同步长下的单位能耗,从图7中可以看出,在4种步态下步长对机器人单位能耗具有一定影响。其中以椭圆步态的性能最好,在步长S=130 mm时,椭圆步态的最小单位能耗比矩形、修正摆线、零冲击步态的最小单位能耗分别减小12.5%、11%、12%。在步高相同条件下,步长较短(S≤100 mm)时,修正摆线、椭圆、零冲击3种步态单位能耗相差较小,分别比矩形步态减小14%、9.1%、11.7%;步长较长(S>130 mm)时,矩形和椭圆步态能耗性优于修正摆线和零冲击步态,在步长为240 mm(最大值)时,矩形和椭圆步态单位能耗比修正摆线和零冲击步态减小约23.8%。另外,由仿真试验动态变形图可知,在步高一定时,步长越长,零冲击轨迹、修正摆线轨迹与土壤模型产生的形变越大,矩形轨迹和椭圆轨迹与土壤模型产生的形变较小,这也与图8中能耗曲线相符。
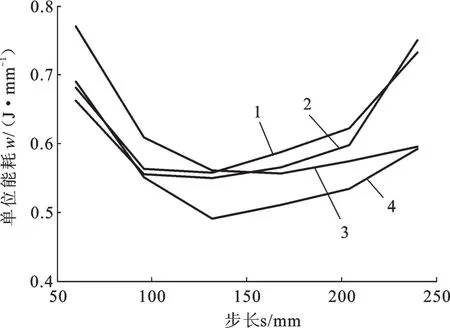
图7 不同步长下的单位能耗Fig.7 Unit energy consumption in different step length
图8所示为4种步态步长S=130 mm、不同步高下的单位能耗。由图8可知,椭圆轨迹能耗性能最好,矩形轨迹单位能耗与步高近似成正比关系,斜率k=3.6×10-3,而其他3种步态单位能耗均随步高的增大先降低再升高。椭圆步态在步高大于50 mm后,与矩形步态单位能耗相差保持在23%~25.5%;在步高H=50 mm时椭圆步态单位能耗达到最小值,比矩形步态减少18.7%,比零冲击步态和修正摆线步态减少8.8%和6.7%。这4种步态单位能耗呈现图8趋势是由于:矩形轨迹在抬腿时速度方向竖直向上,使得抬腿出土时几乎不受到土壤模型的阻碍作用,单位能耗仅与步高变量有关,能耗与时间近似成正比关系;而其他3种轨迹在抬腿出土时的速度方向为斜向上,土壤模型会阻碍足端运动,且步高越小阻碍越大,而步高对单位能耗的影响小于土壤阻碍作用,所以这3种步态的能耗呈现出随步高增大先减小后增大的趋势。
3 机械腿土槽试验
3.1 土槽试验装置及原理
图9所示为土槽试验装置,图中机械腿通过联轴器和轴与扭矩传感器和机械腿髋关节、膝关节曲柄相连,实现关节转动,机械腿通过迈步蹬土向前运动。扭矩传感器可测得机械腿在整个周期内两关节扭矩M(N·m)及对应转速n(r/min),利用测得的扭矩值与转速可得到单周期能耗:
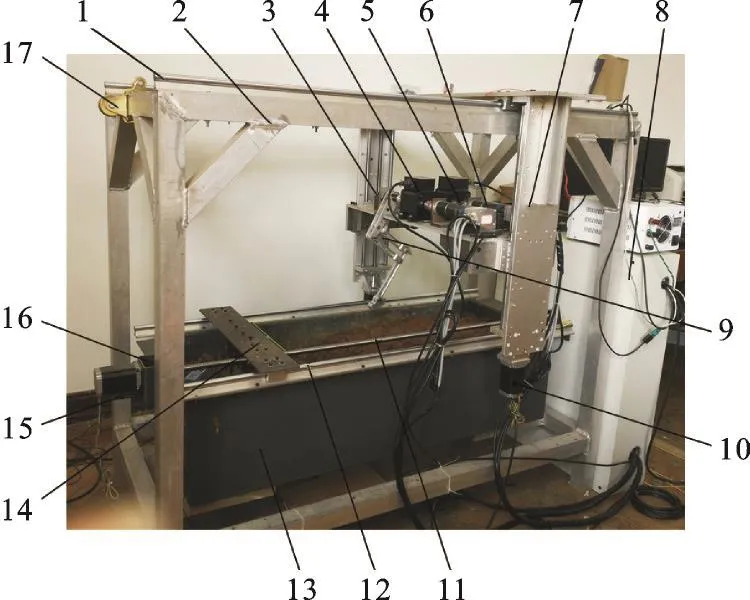
图9 土槽试验装置Fig.9 The structure of test bench
由此可知,在周期一定时,单周期能耗只与转速和扭矩相关,而单腿土槽试验与仿真试验的关节理论转速值是相同的,因此在结果验证时可不必求出系统总能耗,直接对比二者扭矩即可完成验证。
需要说明,2种试验机械腿均有负载,仿真试验中机械腿施加负载通过直接在ABAQUS中加载负载来实现,实际试验中机械腿施加负载通过控制落腿过程中足端在土壤中的下陷深度来实现。机械腿的能耗主要来源于入土时的支撑相阶段,此阶段机械腿受支持力较大,所需扭矩也相应较大,而腾空相阶段只需实现机械腿的摆动,所需扭矩较小,此阶段相应的能耗也较小,这从后面扭矩图中支撑相与腾空相扭矩大小比较中可以直接看出。
3.2 试验结果
图10为机械腿椭圆步态下行走时足迹仿真和实际对比图。由图10可以看出,仿真试验和实际试验中足端的土壤变形吻合较好,足迹相似。图10中,S0=130 mm,S=127 mm,实际试验机械腿测量步长S有一定误差,误差率约为2.3%,由机械加工精度和安装误差引起。
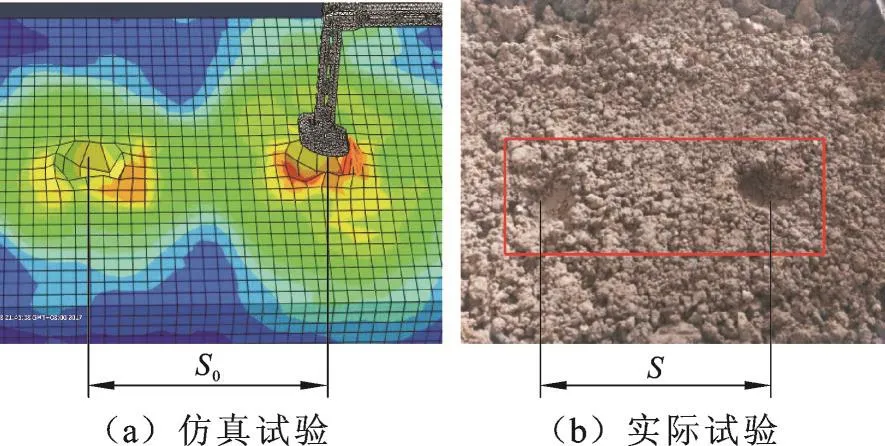
图10 机械腿椭圆步态下足迹图Fig.10 Footprint comparison of simulation and actual candition
图11和图12所示为机械腿实际土槽试验,以及在ABAQUS中进行与实际同条件的仿真试验,得到的椭圆步态机械腿髋关节、膝关节实际和仿真扭矩。
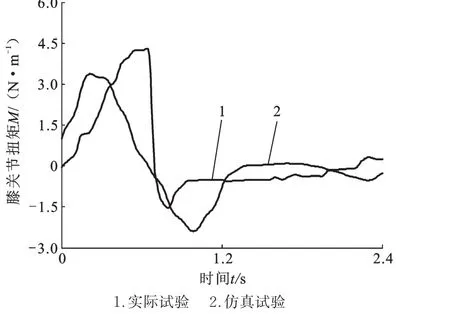
图11 膝关节扭矩对比图Fig.11 Knee joint torque comparison
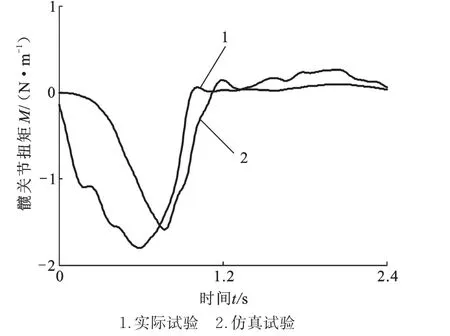
图12 髋关节扭矩对比图Fig.12 Hip joint torque comparison
在试验中,0~1.2 s为支撑相阶段,1.2~2.4 s为腾空相阶段。从图11、图12可知,0~1.2 s支撑相阶段,机械腿经历入土、稳定、移动过程,需要关节提供较大扭矩。在图11所示的膝关节据矩曲线中,由于连杆中各销孔间配合间隙的叠加,使实际试验的扭矩变化出现滞后。在支撑相后段0.72~1.2 s时,由于扭矩传感器、两驱动电机、机械腿以及安装平台所构成的整体结构惯性较大,在实际试验中支撑相移动速度达到最大后机械腿一部分运动由整体结构的惯性提供,而仿真试验只有机械腿本身的惯性,运动基本由关节扭矩提供,所以此阶段仿真试验的关节扭矩要大于物理试验的关节扭矩。图12所示的髋关节扭矩曲线中,实际试验与仿真试验关节扭矩变化趋势基本相同,但有一定误差,这是由于实际试验中存在连杆与销的摩擦作用和土壤的黏附作用,使得实际试验关节扭矩大于仿真试验关节扭矩。t为1.2~2.4 s时为腾空相阶段,髋关节与膝关节扭矩接近于零,实际试验与仿真试验扭矩曲线较吻合。此时间内机械腿处于抬腿腾空阶段,在实际试验中机械腿需要克服各部件自重作用与各个连杆连接处的摩擦作用,在仿真试验中机械腿只需克服自重作用,所以在此阶段关节只需提供较小扭矩。实际试验和仿真试验之间的误差是不可避免的,但可以看出关节扭矩变化趋势在2种试验中能够对应,且误差在可承受范围内,由实际试验可证明仿真试验结果的正确性。
4 结论
(1)在4种步态中,椭圆步态性能最好,其最优步态参数为步长130 mm、步高50 mm。
(2)仿真试验和实际试验中足端的土壤变形吻合较好,足迹相似。
(3)实际试验与仿真试验关节扭矩变化趋势基本相同,虽在支撑相阶段存在一定误差,但误差在可承受范围内,由此可证明仿真结果的正确性。
[1] 孟健,李贻斌,李彬.四足机器人对角小跑步态全方位移动控制方法及其实现[J].机器人,2015(1):74⁃84.MENG Jian,LI Yibin,LI Bin.Control Method and Its Implementation of Quadruped Robot in Omni⁃ directional Trotting Gait[J].Robot,2015(1):74⁃84.
[2] SEMINI C,TSAGARAKIS N G,GUGLIELMI⁃NO E,et al.Design of HyQ—a Hydraulically and Elec⁃trically Actuated Quadruped Robot[J].Proceedings of the Institution of Mechanical Engineers,Part I:Jour⁃nal of Systems and Control Engineering,2011,225(6):831⁃849.
[3] 余联庆,王玉金,王立平,等.基于机体翻转的四足机器人翻越台阶过程的运动学分析[J].中国机械工程,2012,23(5):18⁃24.YU Lianqing,WANG Yujin,WANG Liping,et al.Ki⁃nematics Analysis of Quadruped Robot Climbing Step Based on Body Flipping[J].China Mechanical Engi⁃neering,2012,23(5):18⁃24.
[4] IIDA M,KANG D,TANIWAKI M,et al.Localization of CO2Source by a Hexapod Robot Equipped with an Anemoscope and a Gas Sensor[J].Computers and Electronics in Agriculture,2008,63(1):73⁃80.
[5] DONGHYEON K,IIDA M,UMEDA M.The Walking Control of a Hexapod Robot for Collecting Field Infor⁃mation[J].Journal of the Japanese Society of Agricul⁃tural Machinery,2009,71(1):63⁃71.
[6] NAGASAKA Y,ZHANG Q,GRIFT T E,et al.An Autonomous Field Watching⁃dog Robot for Informa⁃tion Collection in Agricultural Fields[C]//ASAE An⁃nual Meeting.Ottawa,2004:1⁃4.
[7] 荣誉,金振林,崔冰艳.六足农业机器人并联腿构型分析与结构参数设计[J].农业工程学报,2012,28(15):9⁃14.RONG Yu,JIN Zhenlin,CUI Bingyan.Configuration Analysis and Structure Parameter Design of Six⁃leg Agricultural Robot with Parallel⁃ leg Mechanisms[J].Transactions of the Chinese Society of Agricultural En⁃gineering,2012,28(15):9⁃14.
[8] MANIKANDAPRABU V,AMBIGAI R.Design and Fabrication of a Four⁃legged Robot for Fertilizer Spray⁃ing[J].International Journal of Applied Engineering Re⁃search,2015,10(9):22249⁃22263.
[9] 李军,苗新聪,张晓宇.四足机器人步幅、步频与扭矩和能耗关系研究[J].组合机床与自动化加工技术,2012(12):10⁃14.LI Jun,MIAO Xincong,ZHANG Xiaoyu.The Research on Effect of Stride Frequency and Stride Length on Joint Torque and Energy Cost in Trotting of Quadru⁃ped Robot[J].Modular Machine Tool & Automatic Manufacturing Technique,2012(12):10⁃14.
[10] 韩宝玲,李欢飞,罗庆生,等.四足机器人腿型配置的仿真分析与性能评价[J].计算机测量与控制,2014,22(4):1163⁃1167.HAN Baoling,LI Huanfei,LUO Qingsheng,et al.Simulation Analysis and Performance Evaluation of Quadruped Robots with Different Leg Configuration[J].Computer Measurement&Control,2014,22(4):1163⁃1167.
[11] 马宗利,朱彦防,刘永超,等.四足机器人新型节能腿的设计与分析[J].东北大学学报(自然科学版),2016,37(4):543⁃547.MA Zongli,ZHU Yanfang,LIU Yongchao,et al.Design and Analysis of New Energy⁃efficient Legs for Quadruped Robots[J].Journal of Northeastern University (Natural Science),2016,37(4):543 ⁃547.
[12] 郑建初,芮雯奕,冯金侠,等.南方水田土壤有机碳动态研究的重要意义及其前沿领域[J].农业环境科学学报,2006,25(增1):334⁃338.ZHENG Jianchu,RUI Wenyi,FENG Jinxia,et al.Research Significances and Advances in Soil Or⁃ganic Carbon Dynamics in Paddy Field of South⁃China[J].Journal of Agro ⁃Environment Science,2006,25(S1):334⁃338.
[13] 陈勇.黄牛在松软地面的行走运动及仿生应用[D].长春:吉林大学,2008.CHEN Yong.Motion of the Yellow Cattle Bostau⁃rus Walking on Soft Ground and Its Bionic Appli⁃cation[D].Changchun:Jilin University,2008.
[14] 章永年,王美思,吴阳,等.五连杆足式机器人腿部机构多目标优化算法[J].农业机械学报,2016,47(10):398⁃404.ZHANG Yongnian,WANG Meisi,WU Yang,et al.Multi⁃objective Optimization Algorithm of Leg Based on Plana Five⁃bar Mechanism[J].Transac⁃tions of the Chinese Society for Agricultural,2016,47(10):398⁃404.
[15] 赵吉昆,黄书君,刑蕾,等.秸秆覆盖下土壤耕作非线性动态过程研究[J].南京农业大学学报,2016,39(4):696⁃702.ZHAO Jikun,HUANG Shujun,XING Lei,et al.NonlinearDynamicProcessSoilTillageunder Straw Mulching Model[J].Journal of Nanjing Agri⁃cultural University,2016,39(4):696⁃702.
[16] 周永强,盛谦,刘芳欣,等.一种修正的Drucker⁃Prager屈服准则[J].岩土力学,2016,37(6):1657⁃1664.ZHOU Yongqiang,SHENG Qian,LIU Fangxin,et al.A study of Modified Drucker⁃Prager Yield Cret⁃erion[J].Rock and Soil Mechanics,2016,37(6):1657⁃1664.
[17] DING L,GAO H,DENG Z,et al.Foot⁃terrain In⁃teraction Mechanics for Legged Robots:Modeling and Experimental Validation[J].International Jour⁃nal of Robotics Research,2013,32(13):1585⁃1606.
[18] ROY S S,PRATIHAR D K.Effects of Turning Gait Parameters on Energy Consumption and Sta⁃bility of a Six ⁃legged Walking Robot[J].Robotics&Autonomous Systems,2012,60(1):72⁃82.
[19] ROY S S,PRATIHAR D K.Dynamic Modeling and Energy Consumption Analysis of Crab Walking of a Six⁃legged Robot[C]//IEEE Conference on Technologies for Practical Robot Applications.Wo⁃burn,2011:82⁃ 87.
[20] 雷静桃,王峰,俞煌颖.四足机器人轨迹规划及移动能耗分析[J].机械设计与研究,2014,30(1):29⁃34.LEI Jingtao,Wang Feng,YU Huangying.Analysis on Trajectory Planning and Energy Consumption of Quadruped Robot[J].Machine Design and Re⁃search,2014,30(1):29⁃34.
[21] 王立鹏,王军政,汪首坤,等.基于足端轨迹规划算法的液压四足机器人步态控制策略[J].机械工程学报,2013,49(1):39⁃44.WANG Lipeng,WANG Junzheng,WANG Shou⁃kun,et al.Strategy of Foot Trajectory Generation for Hydraulic Quadruped Robots Gait Planning[J].Journal of Mechanical Engineering,2013,49(1):39⁃44.
[22] 周坤玲.四足仿生机器人高速步态规划方法研究[D].北京:北京交通大学,2013.ZHOU Kunling.Study on Generating High⁃speed Gait of a Quadruped Robot[J].Beijing:Beijing Ji⁃aotong University,2013.*
