弹道修正弹固定鸭舵测姿方法研究
2018-06-21王晓云郝永平张嘉易
王晓云,李 昱,郝永平,张嘉易
(沈阳理工大学 机械工程学院,辽宁 沈阳 110159)
随着战争方式的改变,现代战争越来越重视远距离、小规模、精确打击.弹道修正弹是在现代战争背景下发展起来的短程精确打击武器.在没有修正能力的“笨弹”上加装修正引信,使其具有修正能力,弹丸从炮膛发射后受诸多因素影响会偏离理想弹道,通过控制修正机构改变弹丸受力,使其回到理想弹道上.一维修正是在弹丸上加装阻尼装置,打击目标时,修正弹的预射落点远于目标点,弹丸飞行过程中通过控制阻尼装置改变弹丸阻力,在炮弹射程的远近上进行修正,使弹丸准确落在目标点上[1].顾名思义,二维修正由一维修正发展而来,二维弹道修正是在弹体上加装一对类似于飞机翅膀的修正舵,通过电机控制修正舵滚转角,不同滚转角下修正舵所受气动力的作用不同,进而改变弹丸的俯仰角和偏航力矩[2],达到改变弹丸的射程和横偏距离,即在弹道X、Y两个维度上进行修正的目的.
1 鸭舵控制方案
弹道修正弹从炮膛发射后,在飞行过程中通过弹载GPS或惯导模块检测弹丸的实际弹道信息和飞行姿态,将检测到的弹道信息反馈给弹载计算机,弹载计算机计算出弹丸的实际弹道,通过与理论弹道比对得出两者之间的偏移量,弹载计算机通过偏移量的大小和方向计算出修正机构的作用位置和作用时间,使系统控制电机输出所需修正力矩[3],修正机构对弹丸在射程和偏航上进行修正,从而完成修正弹弹道的二维修正.鸭舵作为弹道修正的执行机构,具体通过其姿态来控制弹道.鸭舵的姿态检测精度决定了鸭舵的控制精度,而控制精度决定打击精度.因此,鸭舵姿态的检测是弹道修正过程中特别重要的一环.二维弹道修正引信如图1所示.

图1 二维弹道修正引信
固定鸭舵作为高旋弹弹道修正的实际执行机构,采用十字型固定翼鸭舵是最理想的,它既保留了弹丸的高速旋转属性,又能够保证弹丸飞行的稳定性[4].利用鸭舵的同向舵和修正舵可以完成弹道的二维修正.十字型固定翼鸭舵虽然可以很好地实现修正弹的二维弹道修正[2],但是由于结构限制,无法在鸭舵上安装特别复杂的检测装置,需要一种新的检测方法来测量固定鸭舵在大地坐标系下的滚转姿态.
2 滚转角解算原理分析
地磁场是自然形成的不受外界干扰并存在于地球表面的一个矢量场,所以地表某处的地磁场强度是一个矢量(可用T表示).矢量T在空间坐标系内除了水平分量(H)还有北分量(X)、东分量(Y)和垂直分量(Z).水平分量、北分量和东分量三者的关系如图2所示.当磁阻传感器随弹体绕弹轴旋转时,地磁场在磁阻传感器各个测量轴上的分量大小不断变化,使传感器测量轴上的感应信号不断变化,若选择两个合适的测量轴输出信号,就可以解算出弹丸不同时刻的滚转姿态角.
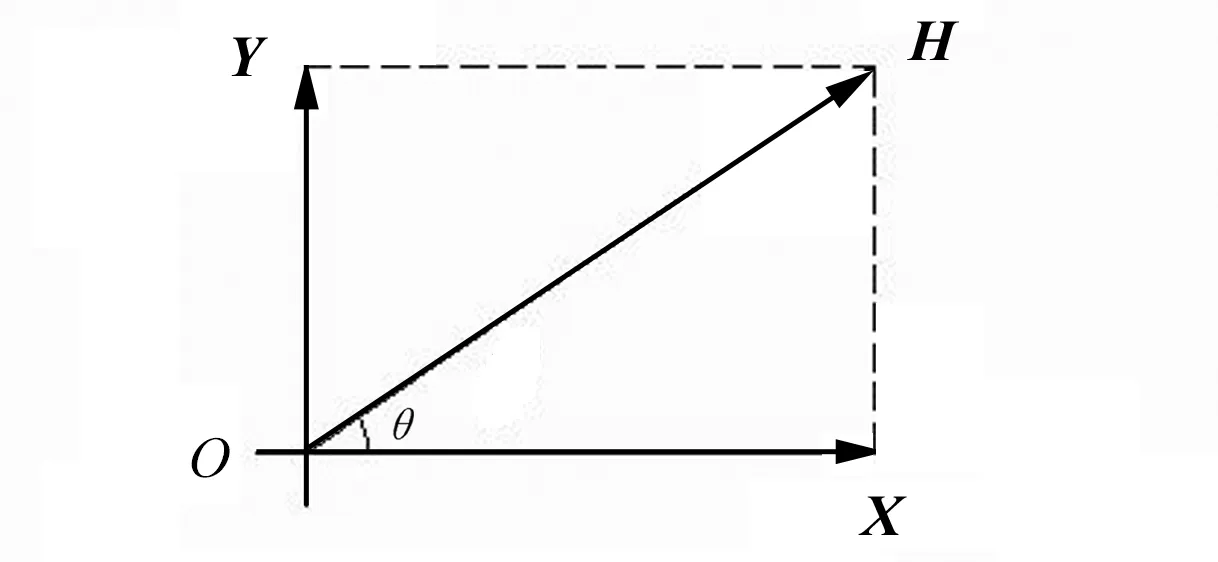
图2 水平分量、北分量和东分量三者的关系
在理想状态下,弹体滚转角θ可用下式计算得出.
(1)
当载体持续匀速旋转时,X和Y就是两个仅相差90°相位的正弦波(图3).实际工程计算过程中通常采用四象限反正切法,以避免由于反正切计算所带来的符号判断问题.
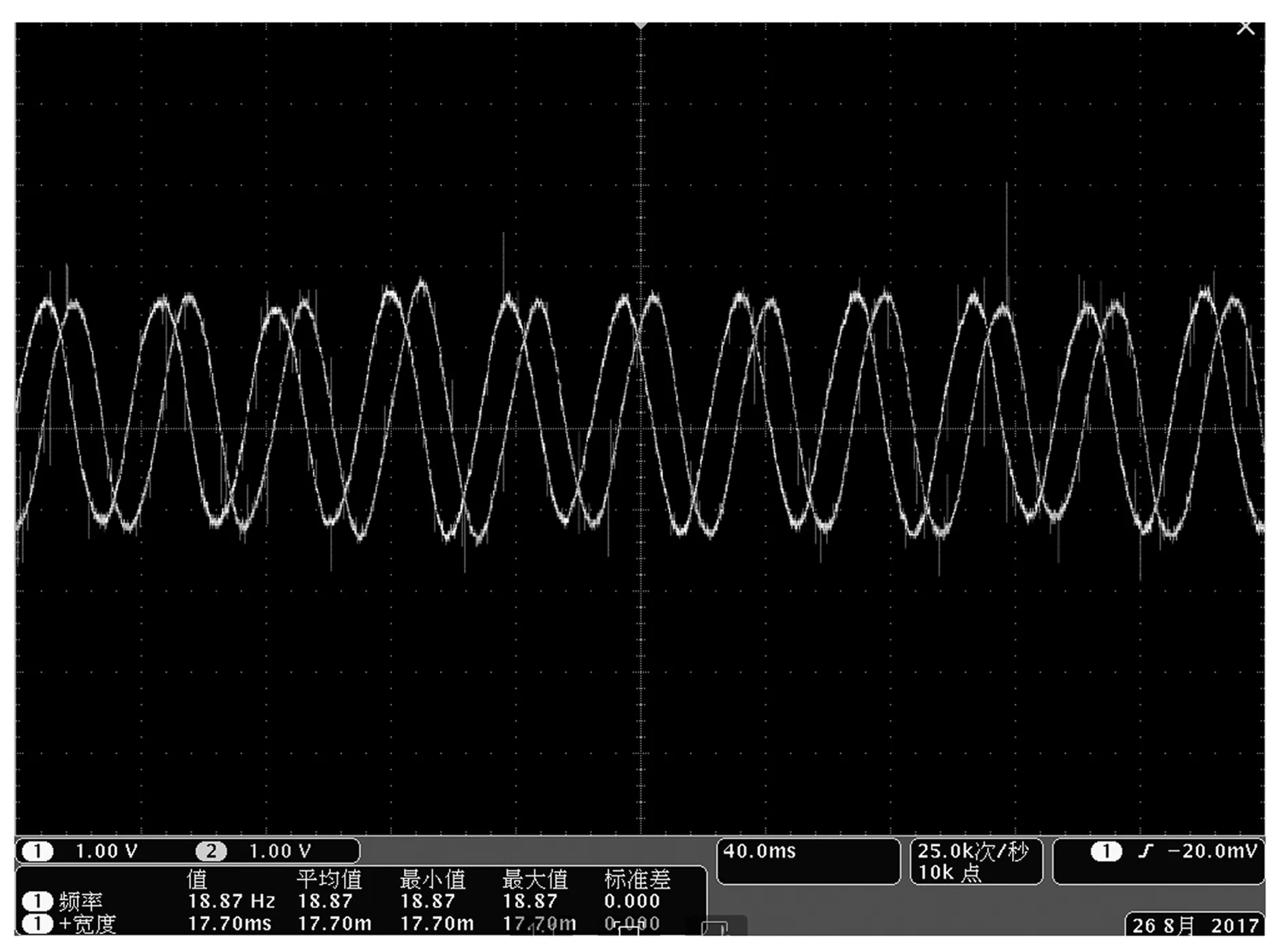
图3 磁阻传感器输出波形
磁阻传感器及其控制电路通过支架安装在修正引信上,修正引信和弹体通过螺纹连接.通过地磁解算模块实时读取磁阻传感器的输出信号,就可以实时解算弹体在地面坐标系上的滚转角.
3 霍尔传感器辅助测姿方法分析
弹丸从炮膛射出瞬间,鸭舵和弹丸相对静止;弹丸射出炮膛后,鸭舵绕弹轴与弹丸反向旋转,此时要测量鸭舵滚转角就需要以一个大地坐标系上的鸭舵滚转角作为解算基准角度.因此,在装配过程中,需要分别对修正舵和弹丸添加标志位.当二者标志位重合时,弹体滚转角和修正舵滚转角重合,弹体滚转角就是鸭舵滚转角.对修正引信结构进行综合分析后,本文采用霍尔传感器对鸭舵和弹丸添加标志位,并在电机芯轴上加装霍尔传感器,在固定鸭舵修正舵处镶嵌微型磁铁(图4).当霍尔传感器产生电压跳变时,修正舵滚转角和弹体滚转角相同,弹载机收到霍尔传感器脉冲信号时的弹体滚转角即为修正舵在大地坐标系上的滚转角,记为γ0.
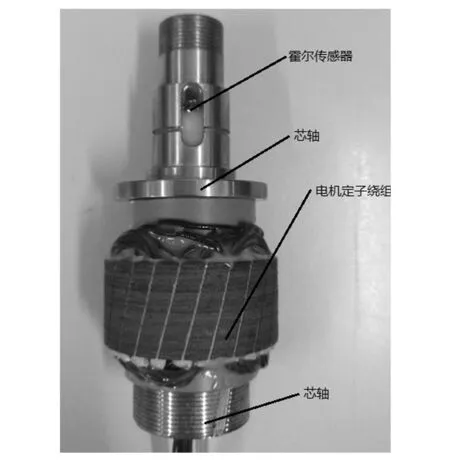
图4 电机芯轴示意图
在弹丸飞行过程中,虽然弹体和鸭舵以不同的转速反向旋转[2],但是每两个霍尔脉冲之间,鸭舵和弹体均相对转动360°.通过记录两次霍尔脉冲的时间间隔T1,可计算出弹体和固定鸭舵的相对转速V.将收到霍尔脉冲时解算出来的弹体滚转角作为基准角度,通过V、惯导系统给出的弹体转速V0、出现霍尔脉冲到弹体滚转角解算结束的时间T2,可计算出鸭舵当前时刻的滚转角.其解算过程如图5所示.以弹体旋转方向为正向,鸭舵旋转方向为负向,在基准角度的基础上加上解算时间内弹体正向的滚转角度,减去鸭舵负向的滚转角度,运用式(2)即可解算出鸭舵当前时刻的滚转角γ.
(2)
式中,γ0为基准角度.
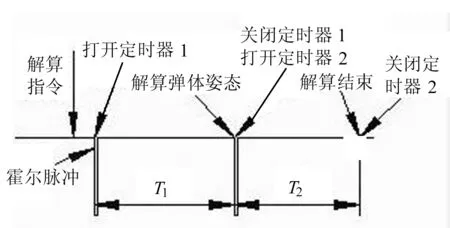
图5 鸭舵当前时刻滚转角的解算过程
4 试验样机及实验数据分析
试验样机中磁阻传感器采用全桥结构的高动态TMR2303三轴线性传感器,控制芯片采用常规的STM32F103C8T6.磁阻传感器输出的微弱模拟信号经过同向比例和差分比例两级放大后进入A/D数模转换模块,转换为数字信号后输入控制芯片中进行处理.试验样机需完成的工作主要包括:信号采集、数字滤波、误差补偿、滚转角解算和数据储存等[4].地磁解算试验样机如图6所示.

图6 地磁解算试验样机
在高速三轴试验台上对试验样机进行测试,用高转速伺服电机驱动修正引信来模拟弹体的高速旋转过程,用另一个工作在力矩模式下的伺服电机驱动鸭舵反向旋转,并且,通过光电码盘实时反馈鸭舵的实际滚转角.针对鸭舵停止在某一固定滚转角处和定速旋转两种情况分别进行了多次实验.表1所示为鸭舵静止于某固定位置时滚转角的解算数据.图7所示为鸭舵匀速旋转时滚转角的解算值变化曲线.对表1中数据分析可知,在大地坐标系上,修正舵分别静止于0°、90°、180°和270°固定滚转角处,修正舵滚转角解算最大偏差在7.4°左右.鸭舵在固定转速下旋转时解算出的滚转角和时间呈线性关系,与鸭舵匀速旋转的实际情况基本符合.
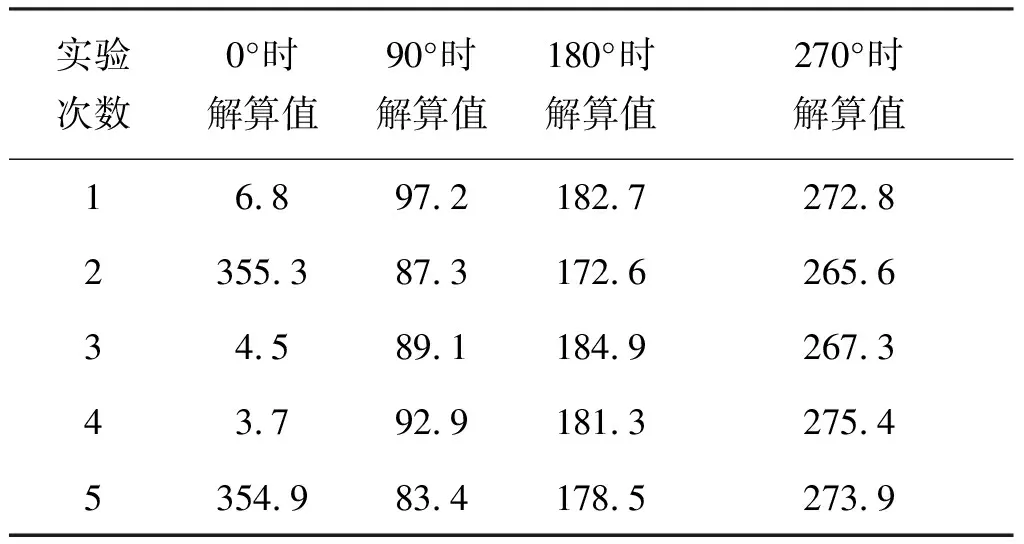
表1 鸭舵静止于某固定位置时滚转角的解算数据 (°)
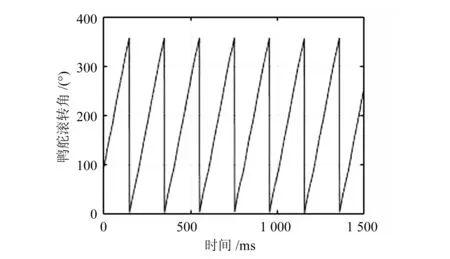
图7 鸭舵匀速旋转时滚转角的解算值变化曲线
5 结束语
本文介绍了二维弹道修正的基本原理,根据二维弹道修正原理,结合霍尔传感器使用方法、电枢绕组、电机芯轴和固定鸭舵结构,提出了一种以地磁传感器为主,霍尔传感器辅助解算鸭舵滚转角的方法.使用该方法,鸭舵滚转角测量值和实际值的最大偏差约为7.4°.通过增加霍尔传感器个数,提高计时精度,完善滤波算法,提高弹体和鸭舵相对转速的精度,降低磁阻传感器信号的不确定误差,可以进一步提高鸭舵滚转角解算精度.本文方法基本上解决了固定鸭舵滚转角的解算问题.
参考文献:
[1] 申连软.吴玉斌,郝永平.基于最小值原理的一维修正弹弹道优化[J].成组技术与生产现代化,2014,31(3):27-31.
[2] 郝永平,孟庆宇,张嘉易,等.固定翼二维弹道修正弹气动特性分析[J].弹箭与制导学报,2012,32(3):171-173.
[3] 鞠广旭,郝永平,张嘉易,等.二维修正弹的控制力矩电机可行性分析[J].成组技术与生产现代化,2016,33(4):37-40.
[4] 张进超.弹道修正机构的控制原理及系统设计[D].沈阳:沈阳理工大学,2016.