基于LoRa的停车位状态信息采集系统设计
2018-06-21祁海禄
祁海禄
(中国船舶重工集团公司第七一〇研究所, 湖北 宜昌 443003)
随着居民汽车保有量的快速增加, “停车难”已是普遍的“城市病”. 在有限的城市空间中, 提高现有停车位利用率是缓解停车问题的重要途径. 在互联网、 物联网等技术的发展下, 打破驾车人和停车场之间信息不对称、 提高停车位利用率的信息采集设备及系统, 已成为各地智慧停车建设的重要内容[1].
全视频免取卡停车管理系统在封闭式停车场中的应用已非常成熟[2], 但在开放式停车场(如城市道路路侧停车场)应用场景下并不是特别适用. 据2017年12月8日《北京路侧停车电子收费遭遇“成长的烦恼”》文章报道, 北京市4086个路侧停车电子收费试点中部分路段采用的视频桩检测, 一个视频桩管理一个停车位, 在实际应用中存在共享单车挡住了视频桩的“眼睛”、 停车不规矩摄像头拍不着等问题, 证实全视频类的检测设备在实际应用场景下有很大的局限性. 2014年以来的城市路侧停车应用案例表明, 地磁检测是目前应用于城市道路路侧停车应用场景下最为广泛的一种检测技术, 但也存在单纯依赖地磁检测技术难以达到满意的检测准确率的问题.
2017年以来, 基于NB-IoT的智慧停车应用试点在全国范围内呈现蓬勃发展的态势, 但NB-IoT在功耗、 响应时间实时性方面并无很强的优势[3]. 与NB-IoT相比, ZigBee, LoRa在功耗、 响应时间实时性方面的性能更优, 但基于2.4 GHz的ZigBee面临的干扰源多[4], 在实际应用场景下的通信可靠性、 稳定性较差; 基于1GHz以下的LoRa技术成熟度高, 但是在实际应用场景下需要部署网关设备. 近3年来, 部分城市已经建设了数万个路侧停车位智慧管理服务系统, 系统总体架构已经建成并运营, 不适宜全盘变更设计, “车辆检测传感器+网关”仍然是已建成系统的刚需设备.
本文基于远距离、 低功耗、 低成本的LoRa无线扩频通讯技术, 设计了一套完整的停车位状态信息采集系统, 旨在满足已建成的城市停车智慧服务系统的续建需求, 车辆检测传感器同时集成地磁和雷达两种检测技术, 用于提高停车位占用/空闲状态检测准确率.
1 系统组成及工作原理
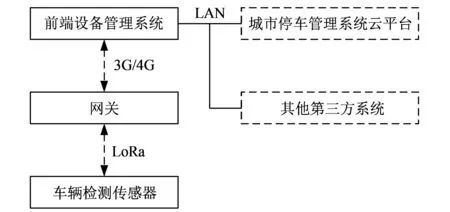
图 1 系统组成框架图Fig.1 System composition diagram
基于LoRa的停车位状态信息采集系统主要由车辆检测传感器、 网关、 前端设备管理系统3部分组成. 车辆检测传感器和网关共同构成前端采集设备, 车辆检测传感器用于实时检测各停车位占用/空闲状态, 并通过LoRa无线局域网将停车位状态信息传输至网关, 网关依托于移动通信网络通过4G DTU将接收到的停车位状态信息转发至前端设备管理系统; 前端设备管理系统将接收到的停车位状态信息进行解析、 处理后以多种形式(web页面、 移动终端APP等)进行发布, 同时可以通过规范的接口协议与城市停车管理系统云平台或其他第三方系统进行数据交换, 如图 1 所示.
2 前端采集设备设计
2.1 车辆检测传感器设计
2.1.1 车辆检测传感器检测原理
地球磁场强度为0.5~0.6高斯, 在一个相对广阔的区域内磁场强度基本是恒定的. 对于停车位占用/空闲状态检测来说, 检测范围一般在6 m×2.5 m以内, 此范围内的地磁场可视为恒定不变. 当有铁磁物体进入传感器检测范围内时, 一定会扰动周围地磁场的分布情况. 车辆可看作是多个双极性磁铁组成的模型, 其前端发动机和车轮以及内部其它铁磁性物体会对局部地磁场产生扭曲和畸变, 地磁传感器能够灵敏感知到地磁信号的变化, 经信号采集、 分析可以得到检测目标的特征信息.
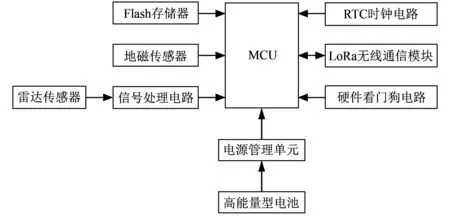
图 2 车辆检测传感器硬件电路组成框图Fig.2 Vehicle detection sensor hardware circuit composition diagram
由于不同车辆使用的材料成分不同, 导致不同车辆对于地磁场的扰动也不同[5], 采用单一的地磁检测在实际应用中仍存在一定概率的误检或漏检的情况. 多普勒雷达传感器可以利用多普勒效应来探测移动物体的存在. 车辆驶入、 驶离停车位时是处于运动状态的, 可视为移动物体, 能够被多普勒雷达传感器检测到. 本文将地磁检测和雷达检测相结合, 以地磁检测车辆存在性为主, 以雷达检测车辆驶入或驶离停车位时的信号特征为辅, 当地磁场本身偶尔出现短时异常波动或停车位附近短时通过车辆时, 停车位所在区域内的地磁场会出现变化, 此时通过雷达传感器检测确认停车位上无移动物体的存在, 可以降低车辆检测传感器的误检率; 当车辆对地磁场的扰动较小时, 适当降低磁场检测阈值, 通过雷达传感器检测停车位上有移动物体的存在, 可以降低车辆检测传感器的漏检率.
2.1.2 车辆检测传感器硬件电路设计
车辆检测传感器硬件电路包括地磁传感器电路、 雷达传感器电路、 无线通信电路、 微控制器MCU和电源管理单元等, 其组成框图如图 2 所示.
1) 地磁传感器电路设计
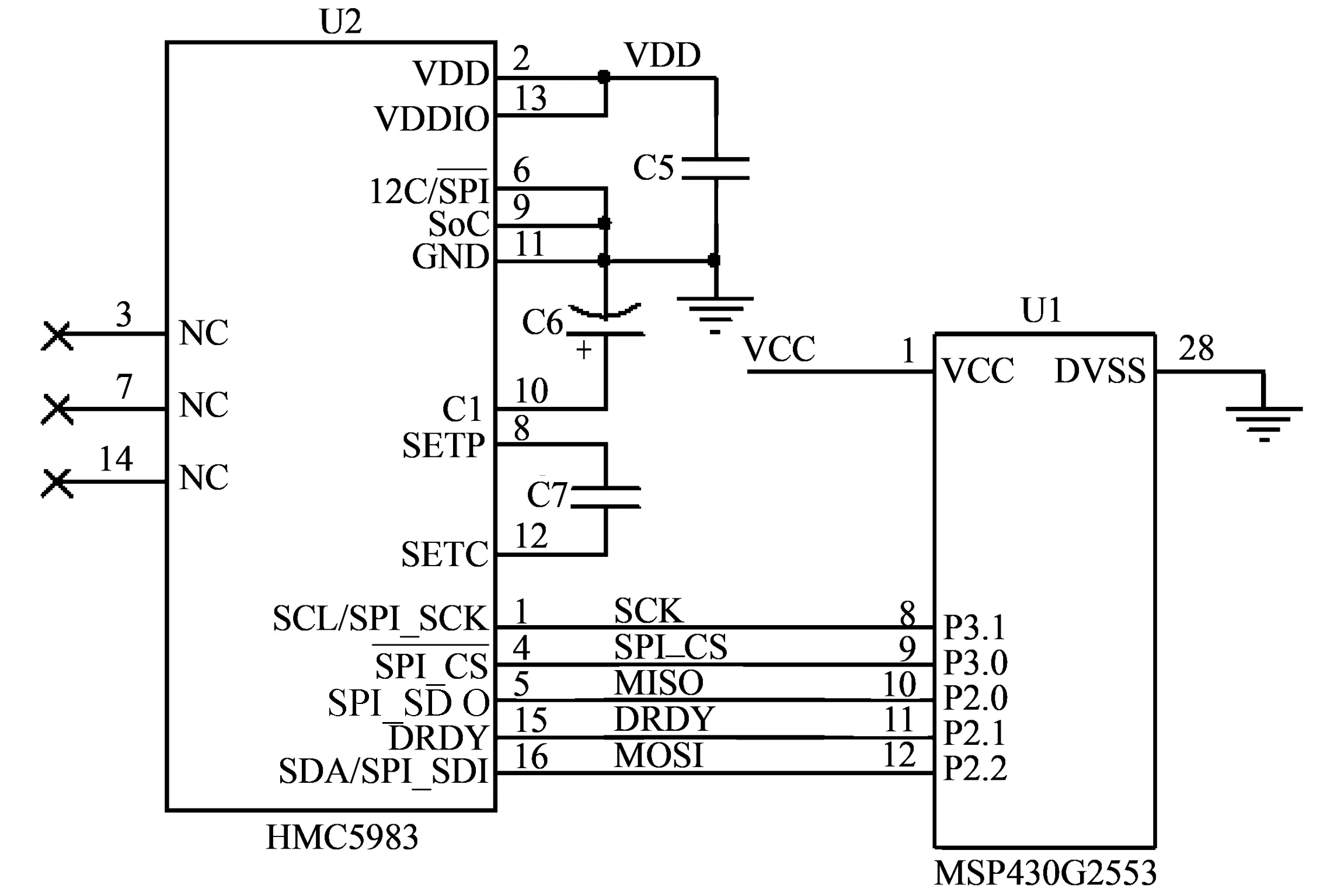
图 3 HMC5983通过SPI向MCU发送地磁信号数据Fig.3 HMC5983 send geomagnetic signal data to MCU through SPI
地磁传感器选用Honeywell公司HMC5983三轴磁阻传感器[6], 该传感器采用各项异性磁阻(AMR)技术, 具有轴向高灵敏度和线性高精度的特点, 内置温度校准, 对于温度变化的环境适应性较强; 测量范围±8 Oe, 自带I2C/SPI数字接口, 本设计选用SPI通信将传感器采集到的地磁信号发送至MCU, 如图 3 所示.
2) 雷达传感器电路设计
雷达传感器选用德国InnoSenT公司推出的一款IPM-165单通道CW多普勒雷达传感器. 该传感器仅输出中频信号, 没有集成信号放大器, 需要进行信号放大、 滤波处理. IPM-165传感器工作电流约35 mA, 对于电池供电和5 a使用时间来说, 工作电流很大, 采取的解决方法是通过MCU控制雷达传感器的有效工作时间, 以达到降低功耗的目的. 这就要求雷达传感器信号处理电路具有响应速度快、 感应灵敏度适中的特点. 据此设计的雷达传感器信号处理电路如图 4 所示. 多普勒雷达传感器信号处理电路就是通过测量电压信号的放大、 滤波、 比较等处理来判别停车位上是否有移动物体.
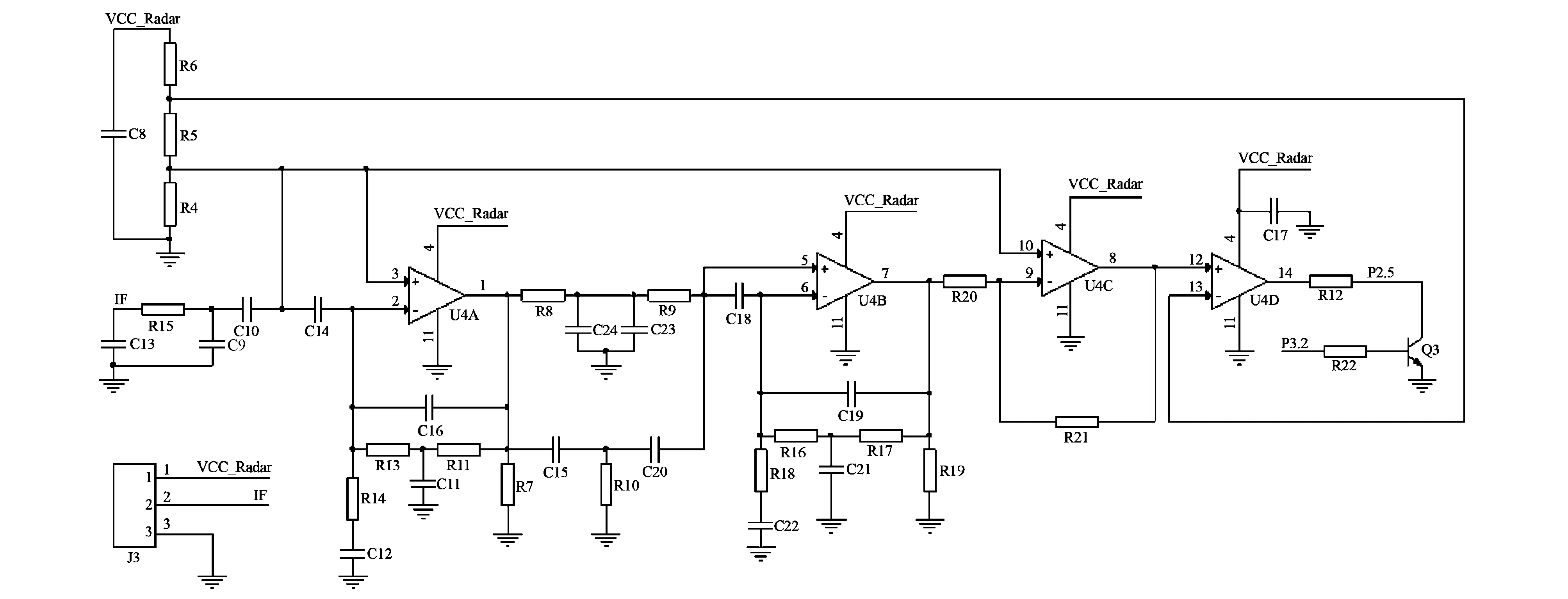
图 4 多普勒雷达传感器中频信号处理电路Fig.4 Doppler radar sensor IF signal processing circuit
3) 微控制器电路设计
MCU微控制器选用TI超低功耗微控制器MSP430G2553[7]. MSP430G2553具有一个强大的16 b精简指令集(RISC)CPU, 16 b寄存器和有助于获得最大编码效率的常数发生器, 数字控制振荡器(DCO)可在不到1 μs的时间里完成从低功耗模式至运行模式的唤醒. MCU微控制器分别通过采集到的磁阻传感器和雷达传感器电压信号的变化来综合判别停车位占用/空闲状态的变化, 并通过电源管理单元控制各部分电路的工作.
4) 无线通信电路设计
无线通信模块选用基于SX1278设计开发的安美通APC340模块. APC340无线通信模块基于LoRa扩频调制技术进行远距离的无线数据传输, 支持420~510 MHz频谱范围内的可靠通信, 覆盖 433 MHz, 470 MHz, 490 MHz等免费频段, 体积小、 功耗低, 性能高, 适合集成于车辆检测传感器电路中. MCU通过TTL串口与APC340模块进行连接, 根据停车位状态数据变化情况, 实时向网关发送停车位占用/空闲状态信息.
2.1.3 车辆检测传感器嵌入式软件设计
按照结构化程序设计的思想, 将系统功能分解成各个可执行的最小功能模块, 每个可执行的最小模块由一个封装函数来完成, 再通过主函数的调用, 完成既定的系统功能. 根据车辆检测传感器的功能要求, 嵌入式软件主要实现以下功能: ① 定时启动多普勒雷达检测停车位上是否有车辆驶入或驶离; 如果有车辆驶入或驶离, 则启动地磁检测并进行计算分析. ② 在对采集的地磁信号进行计算分析时, 与当前设定的阈值比较, 进而判别当前停车位的状态. 如果采集到的地磁信号超过设定的阈值, 表明停车位当前状态为占用; 反之, 表明停车位当前状态为空闲. ③ 实时更新被检测停车位当前状态, 并控制LoRa通信模块及时向网关无线发送当前停车位状态信息. ④ 特别地, 当多普勒雷达检测停车位上无车辆驶入或驶离, 且地磁检测判别当前停车位状态为空闲, 则自适应校正更新地磁检测基准值, 以抵消车辆检测传感器周围地球磁场的持续微小变化.
车辆检测传感器主程序流程如图 5 所示. 整个程序可分为系统初始化程序、 多普勒雷达定时扫描程序、 地磁信号采集程序、 停车位状态综合解算判别程序、 TTL串口通讯程序等. 本文将多普勒雷达的定时动态检测和地磁信号的静态检测相结合, 以准确捕捉车辆驶入或驶离停车位时的信号特征为判别参数, 有效提高了车辆检测传感器的检测准确率.

图 5 车辆检测传感器主程序流程图Fig.5 Vehicle detection sensor main program flow chart
2.2 网关设计
2.2.1 网关硬件设计
网关硬件电路包括供电电源单元、 MCU综合处理单元、 LoRa无线通信电路、 4G DTU通信电路和SD卡存储电路等, 其组成框图如图 6 所示.
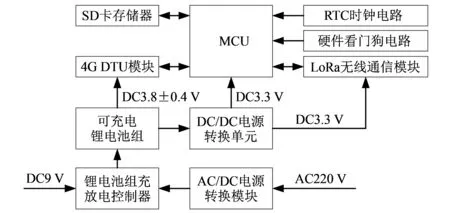
图 6 网关硬件电路组成框图Fig.6 Gateway hardware circuit composition diagram
网关采用模块化设计, 具备以下功能: ① 无线接收车辆检测传感器实时发送的停车位状态信息和设备状态信息. ② 实时向前端设备管理系统发送停车位状态信息和前端设备状态信息. ③ 当移动通信网络(3G/4G)出现故障, 导致网关与前端设备管理系统断开连接时, 自动保存停车位状态信息; 当移动通信网络(3G/4G)恢复正常, 网关与前端设备管理系统恢复连接时, 自动读取SD卡内的历史数据, 并向前端设备管理系统补发停车位状态信息. ④ 可同时接入市电供电和太阳能供电, 自动优先选择太阳能供电; 也可单独接入市电供电或太阳能供电. ⑤ 可对备用锂电池组进行充放电管理.
2.2.2 网关嵌入式软件设计
根据网关的功能要求, 嵌入式软件主要实现以下功能: ① 实时接收车辆检测传感器发送的停车位状态信息或设备状态信息. ② 当4G DTU与前端设备管理系统处于连接状态时, 实时将停车位状态信息或设备状态信息发送至前端设备管理系统; 当4G DTU与前端设备管理系统处于断开或正在连接状态时, 暂时将接收到的停车位状态信息写入SD卡保存; 当4G DTU与前端设备管理系统恢复连接时, 先从SD卡中读取已存储的历史停车位状态数据, 补发至前端设备管理系统, 然后删除SD卡中已读取过的数据.
网关主程序流程如图 7 所示. 整个程序可分为系统初始化程序、 无线局域网实时接收程序、 移动通信网络远程数据发送程序、 SD卡数据读写程序、 串口通讯程序等.
3 前端设备管理系统软件设计
前端设备采集的数据通过移动通信网络(3G/4G)传输至后台服务器的通信链路示意图如图 8 所示, 后台服务器用于部署前端设备管理系统软件. 前端设备管理系统软件的主要功能是接收数据报文, 并解析报文, 得到原始数据, 将数据存储到数据库, 再根据使用需要对数据进行各种处理、 信息发布或数据交换等.

图 8 数据传输4G通信链路示意图Fig.8 Data transmission 4G communication link diagram
前端设备管理系统软件的设计选用了较为流行的基于Windows平台的应用程序开发环境Visual Studio 2015. Visual Studio 2015是一套基于组件的软件开发工具, 可用于构建功能强大、 性能出众的应用程序, 支持跨平台移动开发、 web开发和云开发等.
前端设备管理系统软件与网关之间的数据传输采用TCP通讯协议, 软件主要实现以下3个功能:
1) 接收数据报文
前端设备管理系统软件实时接收数据报文通过Socket(套接字)类来实现, 服务器端启动并监听客户端连接的过程为:
① 创建一个Socket套接字;
② 把创建的Socket套接字与本地IP、 端口号绑定;
③ 设置Socket套接字为监听模式;
④ 在Socket套接字上接收客户端的接入请求.
2) 解析数据报文
前端设备管理系统接收的数据报文包括停车位状态数据包、 车辆检测传感器心跳包和网关心跳包3种. 停车位状态数据包主要包括车辆检测器编号、 电量、 无线信号强度, 停车位状态信息及状态发生变化的时间等; 车辆检测传感器心跳包主要包括车辆检测传感器编号、 电量、 无线信号强度, 车辆检测传感器运行状态及对应的时间信息等; 网关心跳包主要包括网关编号、 电量、 4G信号强度、 网关运行状态及对应的时间信息等.
根据约定的报文协议将16进制的数据报文解析为具有物理意义的量值.
3) 存储数据
前端设备管理系统将解析后的数据报文存储到数据库中, 根据使用需要访问数据库并调用相关数据.
4) 发布信息
为了便于数据查看, 将停车位状态数据及设备心跳数据解析、 存储后, 按照用户的需求访问数据库并读取相关数据, 发布于web页面, 生成各种统计报表, 使得停车位的状态信息、 车辆检测传感器和网关的运行状态信息可以一目了然地了解到.
4 系统测试及结果
本次实装测试环境位于单位内部一段连续路侧停车场, 共11个“一”字形停车位, 停车位规格为5.3 m×2.2 m, 总长约59 m, 如图 9 所示. 车辆检测传感器经室内调试、 装配好以后, 选用了编号为01#~11# 共11个车辆检测传感器安装于路侧停车位几何中心位置, 并用环氧树脂灌封.

图 9 车辆检测传感器测试环境及现场安装实拍图Fig.9 Vehicle detection sensor test environment and site installation photograph
自2015年8月13日至10月12日期间观测了16 d, 共计561次观测样本, 漏检2次, 检测准确率为99.64%. 559次正确检测样本中, 有3次是雷达检测发挥了作用, 也就是说, 如果没有增加雷达检测, 会多出现2次误检、 1次漏检的问题; 因为增加了雷达检测, 观测统计期间内的车辆检测准确率提高了0.53%. 这16 d的观测数据如表 1 所示. 观测方法为: 每天上午、 中午、 下午、 傍晚随机观测, 每次观测时间约30 min, 观测每个停车位的使用状态与前端设备管理系统数据是否相符, 并做记录. 在观测时间内, 同一个停车位有多次车位状态变化, 按停车位实际状态变化次数计算并记录.

表 1 11个停车位的使用状态观测记录
基于LoRa的停车位状态信息采集系统经设计、 生产、 测试后, 已成功安装于某省会城市的道路智慧停车系统项目中, 如图 10 所示.

图 10 某省会城市道路智慧停车系统前端采集设备现场安装实拍图Fig.10 A provincial city road wisdom parking system front-end acquisition equipment site installation photograph
本文所设计的系统自现场安装运行一年多以来, 运行效果良好. 前端设备管理系统通过规范的API接口与城市停车管理系统云平台连接, 城市停车管理系统云平台通过网站、 巡检PDA等方式进行信息发布; 前端采集设备实时采集停车位状态信息, 摘取2017年8月1日~2017年9月30日的统计数据, 实际应用环境下的检测准确率高于96%(此统计数据未剔除停车不规范、 停车位附近环境突变等客观因素的影响).
5 结 语
本文以城市道路停车智慧管理服务系统建设的实际需求为牵引, 设计了一套基于LoRa的停车位状态信息采集系统, 重点阐述了车辆检测传感器的设计. 车辆检测传感器在设计上同时集成了地磁和雷达两种探测技术, 以地磁检测车辆存在性为主, 以雷达检测车辆驶入或驶离停车位时的信号特征为辅, 可以减少车辆持续停车过程中的跳变现象和降低邻近短时间通过车辆的影响, 有效降低了车辆检测传感器的误检率和漏检率. 实装测试和应用表明: 本文所设计的停车位状态信息采集系统具有较高的检测准确性和可靠性, 适合应用于城市道路停车管理系统中.
参考文献:
[1] 吴韶龙, 夏厚峰. 智能设备解决城市“停车难”[J]. 上海信息化, 2017(2): 60-63.
[2] 夏义年, 黄迪. 全视频智慧停车场综合解决方案[J]. 现代建筑电气, 2014(1): 53-55.
Xia Yinian, Huang Di. Integrated solutions of full video intelligent praking lot[J]. Modern Architecture Electric, 2014(1): 53-55. (in Chinese)
[3] 上海移远通信技术股份有限公司. BC95硬件设计手册[Z]. 上海: 上海移远通信技术股份有限公司, 2017.
[4] 冉君军, 刘志勤, 钟敏. ZigBee网络中基于信道状态预测的WiFi干扰避免方法[J]. 计算机测量与控制, 2017, 25(6): 124-127.
Ran Junjun, Liu Zhiqin, Zhong Min. WiFi interference avoidance method based on channel state prediction in ZigBee networks[J]. Computer Measurement & Control, 2017, 25(6): 124-127. (in Chinese)
[5] 赵东亮, 李凤, 郑毅, 等. 基于HMC5983磁阻传感器的乘用车底部地磁场分布特性的实验研究[J]. 电子测量技术, 2017, 40(2): 155-161.
Zhao Dongliang, Li Feng, Zheng Yi, et al. Bottom of the passenger car distribution features of the geomagnetic field experimental study based on magneto-resistive sensor of HMC5983[J]. Electronic Measurement Technology, 2017, 40(2): 155-161. (in Chinese)
[6] Honeywell International Inc. 3-Axis Digital Compass IC HMC5983[Z]. USA: Honeywell International Inc, 2011.
[7] Texas Instruments Incorporated. MSP430G2x53 Mixed Signal Microcontroller[Z]. USA: Texas Instruments Incorporated, 2013.