一种基于ADS-B的雷达系统误差标定方法
2018-06-19刘军伟
林 盛,刘军伟,徐 伟
(1.中国电子科技集团公司第三十八研究所,安徽 合肥 230088;2.孔径阵列与空间探测安徽省重点实验室,安徽 合肥 230088)
0 引 言
雷达系统误差是一个相对固定的值,其中包括斜距、方位和俯仰等系统误差,对于同一部雷达而言,它们的值是相对固定的,产生系统误差的原因也有多种多样。为了提高雷达对目标的探测精度,减弱多雷达情报融合时雷达系统误差带来的影响,很有必要对雷达系统误差进行标定。因此,如何快速准确地对雷达系统误差进行标定是一个值得研究的问题。
广播式自动相关监视(ADS-B)是自动相关监视技术(ADS)的一种[1-3]。ADS-B以先进的地空、空空数据链为通信手段,以先进的导航系统及其他机载设备产生的信息为数据源,通过对外发送自身的位置和速度等状态参数,并接收其他飞机的广播信息,达到飞机间的相互感知,进而实现对周边空域交通状况全面、详细的了解。ADS-B技术具有使用成本低、精度误差小、监视能力强等明显的优势。利用ADS-B数据广播的特性,可以感知雷达附近所有搭载ADS-B设备的飞机的实时位置信息,这些信息正好可以用于雷达系统误差的标定。相对于采用试飞标定的方法,该方法具有简单、快速和低成本等优势[4-10]。
因此,本文提出了一种基于ADS-B的雷达系统误差标定方法。该方法通过匹配雷达点迹和ADS-B信息,对匹配成功的点迹位置进行插值计算,得到点迹真值位置,最后进行误差分析得到雷达系统误差。最终实验结果表明本文提出的方法可以对雷达系统误差进行准确标定,该方法具有很好的鲁棒性,便于工程实现。
1 雷达误差标定流程
实现雷达的误差标定,就是要统计出雷达输出目标点迹的斜距、方位和俯仰与真实目标的斜距、方位和俯仰值之间的固定误差。由于雷达的量测除了系统误差之外,还存在随机误差,随机误差和雷达的精度相关,不同的雷达其随机误差不一致,可以通过将大量量测值进行平均的方法来消除随机误差,从而得到雷达固定的系统误差。由于ADS-B给出的位置信息是在WGS-84坐标系下的坐标,而雷达点迹的坐标是以雷达为中心的球坐标系,因此,需要将它们的坐标进行统一,把ADS-B的位置通过坐标转换成以雷达为中心的球坐标系中。另外,由于雷达探测目标的时间和ADS-B广播位置的时间是不一致的,为了得到目标被雷达探测时刻的真实位置,需要把雷达点迹位置和ADS-B的目标位置进行时间上的对准。本文通过对ADS-B位置信息进行内插值的方法得到目标被雷达探测时刻的真实位置。最后,雷达探测的点迹和ADS-B目标位置的配对也是进行误差标定的重要步骤,如何准确地进行相关配对,关系到误差标定的准确性。
图1给出了本文提出的误差标定流程。

图1 误差标定流程
1.1 坐标变换
在进行雷达点迹和ADS-B位置相关配对前,需要把雷达点迹的坐标系和ADS-B位置的坐标系进行统一。由于ADS-B广播的飞机位置和雷达位置都由WGS-84坐标系下的经度、纬度和高度表示,需要将飞机位置转换到相对于雷达位置的球坐标系下,坐标转换的步骤如下:
(1) 将飞机位置和雷达位置从WGS-84坐标系转换到地心地固坐标系(ECEF)中;
(2) 将飞机位置转换到以雷达位置为原点的东北天坐标系(ENU)中;
(3) 然后将飞机位置由东北天转换到以雷达位置为原点的球坐标系(RAE)中。
1.2 相关配对
为了快速地对采集的大量雷达点迹位置信息和ADS-B位置信息记录进行相关配对,把所有采集到的雷达点迹按照时间的先后顺序进行排列,对于每一架飞机的每一个ADS-B位置信息,本文使用二分查找方法快速找到该ADS-B时间前后1.5 s内的所有雷达点迹(本文使用的ADS-B设备采集数据的频率为1 s),然后根据雷达点迹精度范围对这些点迹的斜距、方位和俯仰信息进行匹配,然后把匹配成功的点迹列入到对应飞机的候选点迹列表中。
1.3 真值解算
真值解算的工作是计算出相关匹配成功的点迹的真实位置信息。由于飞机的ADS-B位置信息在时间维上是连续的,可以根据点迹时间进行插值计算,得到飞机在点迹时间时刻所处的真实位置,对位置的插值可以在WGS-84坐标系或者以雷达为原点的球坐标系下进行。由于ADS-B广播飞机位置的时间间隔短,可以不需考虑地球曲率带来的影响,而且民航飞机不会进行大幅度的机动,因此,使用插值方法计算目标点迹对应飞机真实位置是可行的。
1.4 野值去除
本文提出的雷达系统误差标定方法的一个特点是不依赖于雷达的航迹信息,完全使用雷达点迹进行匹配。该方法的优点是避免了航迹本身可能出现的关联错误给误差标定带来的影响,同时,对所有飞机的点迹进行匹配,点迹的数据量较大,可以避免雷达随机误差带来的影响。但是,使用点迹进行相关也有可能会把一些野值点迹和真实目标成功进行了匹配,因此需要对匹配成功点迹做进一步的野值去除,野值去除的步骤如下:
(1) 统计所有点迹的斜距、方位和俯仰维上量测和真值之间误差的均值和标准差;
(2) 如果点迹在斜距、方位或者俯仰维上任意一维的误差与误差均值之差大于3倍的标准差,则认为该点迹是野值,并从成功配对的点迹列表中删除;
(3) 重复步骤1和步骤2,多轮操作后可剔除大部分野值。
1.5 雷达误差分析
统计所有野值剔除后的点迹在斜距、方位和俯仰维上量测和真值之间误差的均值、标准差和均方根误差。误差的均值即为雷达的系统差,误差的标准差反映的是雷达随机误差的离散程度,可以体现雷达在斜距、方位和俯仰维上所能达到的精度。
2 标定方法验证
本文试验数据采集点迹总个数为1 258 510。在该时间范围内采集的ADS-B信息包含188驾飞机,收集到飞机位置总个数为64 833个。
图2显示了该时间范围内所有雷达点迹位置的态势信息。图3显示了该时间范围内所有ADS-B位置的态势信息。

图2 初始雷达点迹位置态势

图3 初始ADS-B位置态势
经过相关配对和野值剔除处理后,有134驾飞机的ADS-B位置信息和雷达点迹位置信息匹配成功,包括3种点迹类型,匹配成功的雷达点迹总个数为38 409个,其中包括12 934个类型一点迹、12 612个类型二点迹和12 863个类型三点迹。
图4显示了所有匹配成功的雷达点迹量测位置的态势信息。图5显示了所有匹配成功的雷达点迹对应的真实位置的态势信息。从图中可以看出本文方法能够准确地从海量的雷达点迹中提取出和ADS-B相匹配的雷达点迹。

图4 匹配成功的雷达点迹量测位置的态势

图5 匹配成功的雷达点迹对应的真实位置的态势
根据匹配成功的点迹信息,可以统计雷达的系统误差,如表1所示。
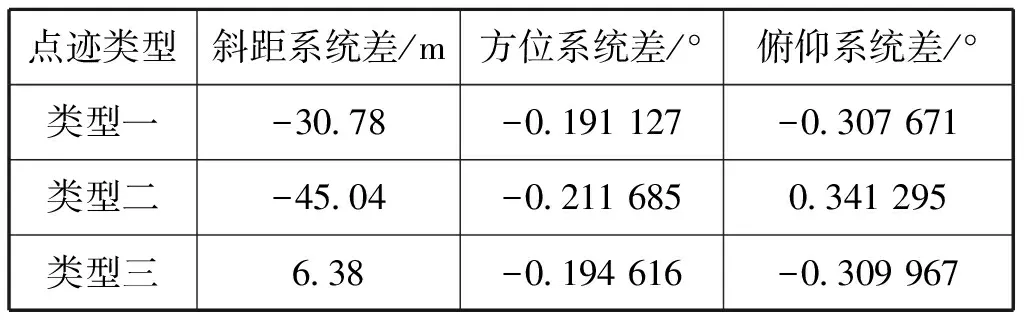
表1 系统误差统计结果
3 结束语
本文利用ADS-B设备收集了雷达周围大量的飞机真实位置信息,提出了一种基于ADS-B的雷达系统误差标定方法,并使用实测数据进行了验证。结果表明,本文提出的方法能够有效地进行雷达系统误差的标定,该方法不依赖于雷达的航迹信息,完全使用雷达点迹进行匹配,避免了航迹本身可能出现的关联错误给误差标定带来的影响。同时,对所有飞机的点迹进行匹配,点迹的数据量较大,可以避免雷达随机误差带来的影响。本文工作的不足之处在于认为ADS-B的数据是准确的,没有考虑ADS-B数据可能出现的误差或者延迟造成的影响,而对于高精度的雷达系统误差标定,这些因素是不能忽视的,还需要进行进一步的研究。
[1] 包悦.ADS-B空管监视技术的发展方向[J].空中交通管理,2007(6):17-18.
[2] 张天平,郝建华,许斌,丁丹.ADS-B在空中交通管制中的应用与发展[J].电子元器件应用,2009(7):74-80.
[3] 罗文田.ADS-B机场场面监视技术研究[J].中国民航飞行学院学报,2011,22(2):67-70.
[4] 李宗武.一种新的机载雷达标校方法[J].现代雷达,2001,23(2):3-5.
[5] 程擎,张澍葳.ADS-B与雷达数据融合的关键问题分析[J].科学技术与工程,2011,11(25):6237-6241.
[6] 孙国政,王索建,董扬.基于ADS-B数据的雷达精度测量方法[J].现代雷达,2011,33(2):18-21.
[7] 吴振亚,王明辉,张瑞平,等.一种基于ADS-B的雷达误差实时融合校正算法[J].西南交通大学学报,2013,48(1):102-106.
[8] 蒋乃欣,张军,罗喜伶,等.ADS与多雷达数据融合中的系统误差配准法[J].北京航空航天大学学报,2005,31(1):78-81.
[9] 刘伟,黄智刚,张军,等.星基ADS与雷达误差标准算法的研究[J].航空学报,2006,27(1):120-124.
[10] 程擎.ADS-B延时时间计算方法的可行性分析[J].计算机应用,2012,32(9):2664-2666.
