对单脉冲雷达的交叉眼干扰效果分析
2018-06-19谭信
谭 信
(西南电子设备研究所,四川 成都 611731)
0 引 言
单脉冲雷达是20世纪50年代初期出现的一种精密跟踪雷达[1]。它利用比较水平方向上2个波束的幅度和相位信息的方法确定方位,利用垂直方向上2个波束来确定仰角。理论上,单脉冲雷达可利用单个目标回波定向,因此具有很强的抗干扰性。目前,针对单脉冲体制雷达,较为有效的角度欺骗干扰方法有非相干干扰、交叉眼干扰和交叉极化干扰。
交叉眼干扰是一种相干干扰,它将单脉冲体制雷达测角引导至干扰源连线之外,对单脉冲雷达有较好的欺骗干扰作用。交叉眼干扰通常作为作战平台的自我防卫手段,如飞机、舰船等用于对主动雷达进行角度欺骗干扰[2]。
1 单脉冲测角原理
现代雷达普遍采用精确的单脉冲测角方式,能够在一个脉冲周期内完成测角,相对于圆锥扫描雷达有如下优点:获得角误差信号时间短;不易受目标回波信号起伏的影响;测角精度高[3]等。根据取出角误差信号的方法不同,单脉冲雷达可以分为振幅和差式单脉冲雷达和相位和差式单脉冲雷达[4],本文重点介绍使用较为广泛的振幅和差单脉冲测角方式,其原理方框图如图1所示。

图1 振幅和差单脉冲雷达原理方框图
振幅和差单脉冲雷达简要工作原理:雷达在空间内发射4个相互部分重叠的波束,图1中A、B、C、D分别代表4个馈源,将收到的4个回波信号进行和、差处理后得到和信号A+B+C+D,方位差信号(A+C)-(B+D),俯仰差信号(A+B)-(C+D),和、差信号经过各自的接收通道和中放处理,和、差两信号经过相位检波,输出得到角误差信号,变成相应的直流误差电压加到方位、俯仰伺服系统,控制天线在角度上跟踪目标。和信号用于发射、观察和测距,还可以用作相位比较的基准。
2 交叉眼干扰
2.1 交叉眼干扰的基本原理
交叉眼干扰采用2个在空间上相隔一定距离的干扰辐射源,发射模拟雷达回波,并使其在功率/相位等参数上满足一定条件,各发射信号合成雷达天线相位中心所在空间点的局部特殊辐射场[5]。该辐射场的波前在雷达所在位置的局部发生扭曲以产生假象,使以平面波前检测为原理的雷达误认为辐射源在另外的虚假位置,或者说到达角是虚假的。交叉眼干扰通常由2路独立的干扰机组成,其收发天线配置如图2 所示。实现交叉眼干扰的主要技术难点是如何保证两干扰源J1、J2的信号在雷达接收天线口面处于稳定的反相。

图2 交叉眼干扰收发天线配置
交叉眼干扰原理图如图3所示,干扰信号J1、J2到达雷达天线口面的信号具有稳定的相位关系,考虑干扰信号和目标回波同时存在的情况。AJ1、AJ2、Ar分别为J1,J2和目标回波信号的幅度,φ1,φ2分别为干扰信号J2和回波信号相对于干扰信号J1的相位差,θ3为目标偏离雷达等强信号方向的夹角,则雷达天线1,2接收到的回波信号为[6]:
(1)
经过波束形成网络,得到和差信号EΣ,EΔ:
(2)
根据单脉冲雷达测向的原理,误差信号为:
(3)
将天线方向图在θ0方向展开幂级数,并取一阶近似如式(4):
F(θ0±θ)=F(θ0)∓F′(θ0)θ
(4)
se(t)≈Kd(θ(1+b2+2bcosφ1+acosφ2+
acosφ2-abcos(φ1-φ2))+θ3(a2+
acosφ2+abcos(φ1-φ2)))
(5)
当误差信号se(t)=0时,跟踪天线的指向角θ′为:
(6)
2.2 各项参数对交叉眼干扰效果的影响
从公式(6)得出:跟踪天线的指向角θ′的大小跟回波信号与干扰信号的幅度比a,两干扰源幅度比b,3个信号之间的相位差φ1,φ2,两干扰源相对于雷达对准轴的夹角Δθ,以及目标偏离两干扰源中心线的角度(θ-θ3)有关。下面具体讨论各参数对天线指向角θ′的影响。
(1) 当θ=θ3时,即目标角度与两干扰源中心线角度重合,是典型的自卫式干扰场景,公式如下:
θ′=
(7)
(2) 当幅度比a趋于0时,即目标回波远远小于干扰信号时,公式(7)简化为下式:
(8)
交叉眼干扰可以形成很大的角度测量误差,该误差可以偏出2个干扰源J1和J2实际的张角之外,这是传统非相干干扰不能达到的。
(3) 当φ1=0时,即2个干扰源同相时,天线指向角为:
(9)

(4) 当φ1=π时,即2个干扰源反相时,天线指向角如式(10):
(10)

3 交叉眼干扰效果分析
考虑机载自卫式干扰,2个干扰源分别位于载机的2个翼尖上,此时信号回波近似在2个干扰源中间,即近似满足θ=θ3。下面对典型场景下的交叉眼干扰进行仿真,并分析各参数对干扰效果的影响。
3.1 幅度比b和相位差φ1对干扰效果的影响
仿真参数设置:a=-20 dB,Δθ=0.1°,φ2=0,θ=θ3=0.02°,b=[0.8,0.9,1,1.1,1.2]。天线指向角θ′与b,φ1的关系仿真结果如图4所示,由图4可知:
(1)φ1越接近180°,b越接近1,天线指向角度越大。当φ1=π,b≈1时,θ′→∞;
(2) 在b取5个不同值时,φ1在180°附近时,天线指向角明显偏出2个干扰源实际的张角之外,取得优于非相干干扰的干扰效果;
(3) 在φ1=π附近变化时,天线指向角减小的速度非常快,当相位差φ1偏离π超过5°后,干扰效果就下降很多。

图4 交叉眼干扰时θ′与b,φ1的关系
3.2 幅度比b对干扰效果的影响
仿真参数设置:a=-20 dB, Δθ=0.1°,φ2=0,θ=θ3,φ1=[178° 179° 180°]。
天线指向角θ′与b的关系仿真结果如图5所示,由图可知:
(1) 当φ1=180°时,在b≈1.01指向角达到极大值,稍微有所偏离b=1,这是由于目标回波信号引起的。
(2) 当φ1≠180°的时候,指向角的极大值点所对应的b也将偏离b=1.01,并随着φ1向180°靠近而向b=1.01靠近。

图5 交叉眼干扰时θ′与b的关系
3.3 幅度比a和φ2对干扰效果的影响
仿真参数设置:a=[0,0.1,0.2,0.3],Δθ=0.1°,θ=θ3,φ1=180°,φ2=0或π。天线指向角θ′与a的关系仿真结果如图6、图7所示。由图6和图7可知:
(1) 在φ1=0时,由于存在目标回波,会引起出现最大值时的b≠1,增大的幅度随着a的增大而增大,即在b≈1+a时,θ′→∞;
(2) 当φ1=π时,由于存在目标回波,会引起出现最大值时的b≠1,减小的幅度随着a的增大而增大,即在b≈1-a时,θ′→∞。

图7 交叉眼干扰时θ′与a的关系(φ2=π)
3.4 两干扰源之间距离L和干扰源与雷达之间距离R对干扰效果的影响
仿真参数设置:b=[0.93 0.97 0.99],5 km≤R≤30 km,L=20 m,φ1=180°,φ2=0。天线指向角与雷达、干扰源之间距离R的关系如图8所示。由图8可知:
(1)b越接近1,天线指向角越大,交叉眼干扰效果越好;
(2) 雷达跟踪天线的指向角θ′随着R增大而减小,即在R=5 km时交叉眼干扰效果要明显优于R=30 km的情况。

图8 交叉眼干扰时θ′与R的关系
仿真参数设置:b=[0.93 0.97 0.99],R=20 km,10 m≤L≤30 m,φ1=180°,φ2=0。天线指向角与两干扰源之间距离L的关系如图9所示。由图9可知:
(1)b越接近1,天线指向角越大,交叉眼干扰效果越好;
(2) 雷达跟踪天线的指向角θ′与两干扰源距离L成线性关系,θ′随着L的增大而增大。

图9 交叉眼干扰时θ′与L的关系
3.5 目标偏离两干扰源中心线的角度(θ-θ3)对干扰效果的影响
仿真参数设置:b=[0.93 0.95 0.97],a=-20 dB, Δθ=0.1°,φ1=180°,φ2=0。天线指向角与目标偏离两干扰源中心线的角度的关系如图10所示。由图10可知:
(1) 雷达跟踪天线的指向角θ′与(θ-θ3)成线性关系,变化范围较小;
(2) (θ-θ3)对天线指向角的影响效果与a的大小有关,随着a的增大干扰效果越发明显。
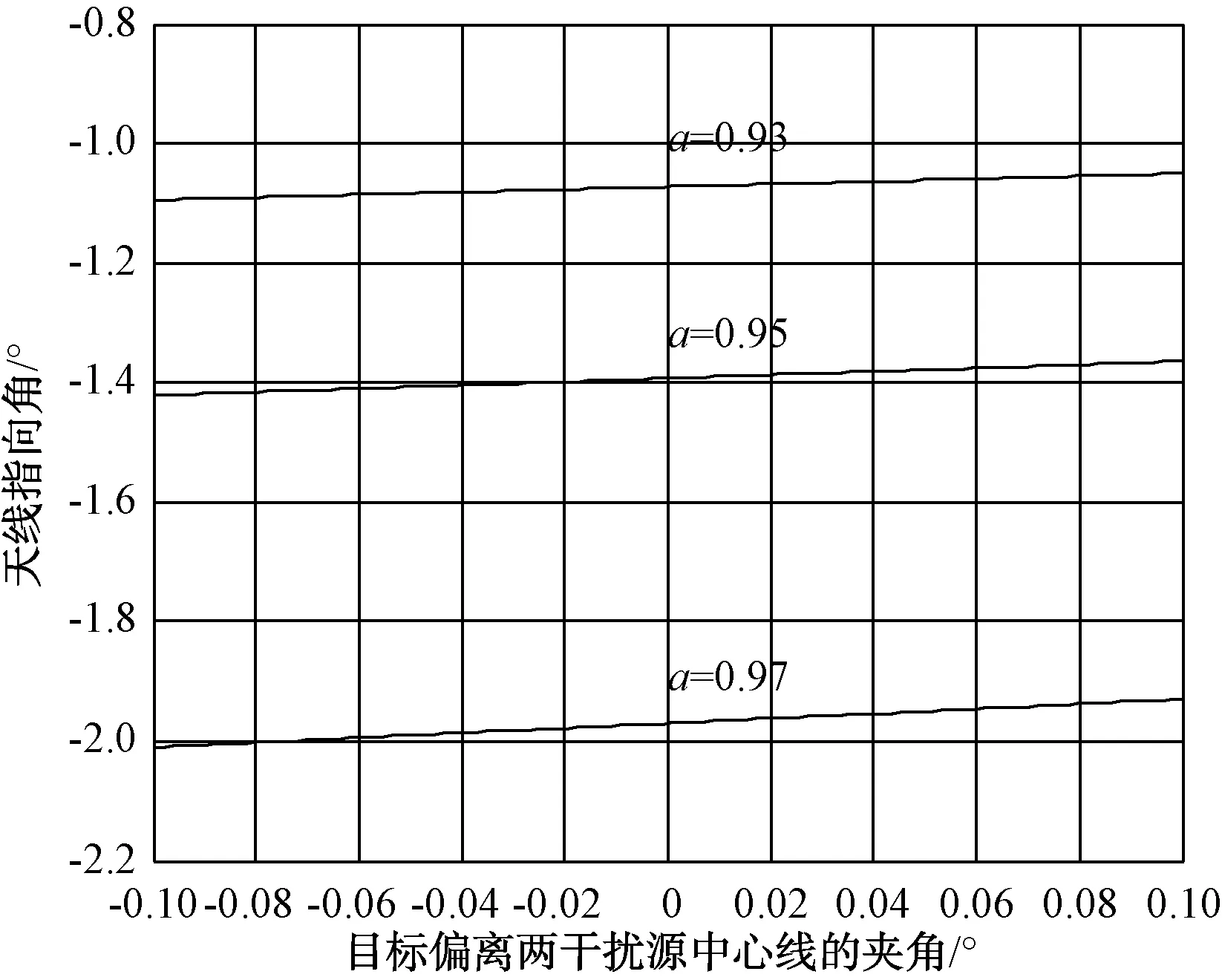
图10 交叉眼干扰时θ′与(θ-θ3)的关系
3.6 效果分析
通过计算机仿真幅度比、相位差和目标偏离两干扰源中心线的角度等参数对天线指向角θ′的影响,在实际应用中,交叉眼干扰取得较好的干扰效果需满足如下条件:
(1) 2个干扰源信号在天线口面的相位差控制在φ1=π偏差较小角度时,交叉眼干扰可以达到较好的效果;
(2) 为了减小搭载平台体目标回波对干扰效果的影响,干扰机必须有足够大的功率,从而保证交叉眼在b=1,φ1=π时达到最好的干扰效果;
(3) 2个干扰源之间距离L越大时,交叉眼干扰效果越好,对于机载交叉眼干扰,干扰源一般布置在飞机两侧翼尖;
(4) 不考虑目标回波的影响,干扰机与雷达之间距离R越小,交叉眼干扰效果越好,但要保证2个干扰源在一个雷达波束内。
4 结束语
单脉冲雷达具有良好的抗单点源干扰的性能,交叉眼干扰可以在满足一定的限定条件下,对单脉冲雷达形成较好的干扰效果,但在实际工程实现时某些条件无法满足,从而导致交叉眼干扰的性能大打折扣。单脉冲雷达角度跟踪往往还需要在距离、速度上首先完成跟踪,一旦距离、速度跟踪回路遭到破坏,其角度跟踪回路也会受到影响,因此对单脉冲雷达的干扰也可以避开其抗单点源干扰的优势,同时对其距离、速度和角度回路进行干扰,从而达到事半功倍的效果。
[1] 司伟建,曲志昱,赵忠凯,等.现代电子对抗导论[M].北京:北京航空航天大学出版社,2016.
[2] 曹菲,刘庆云,辛增献.交叉眼干扰数学建模[J].现代雷达,2013,35(6):69-72.
[3] 孙富君,陶建锋,孙宏伟.单脉冲雷达的角度跟踪干扰研究[J].现代雷达,2004,26(1):17-18.
[4] 丁鹭飞,耿富录.雷达原理[M].3版.西安:西安电子科技大学出版社,2002.
[5] 王慧萍,张友益.一种交叉眼干扰技术实现的新方法[J].舰船电子对抗,2007,30(6):23-25.
[6] 陈安娜.对单脉冲雷达的相干两点源干扰机理研究[J].航空兵器,2007(2):7-11.
