一种舰载一维相控阵雷达阵面控制系统的设计方法
2018-06-19陈彦来刘文政
陈彦来,刘文政,高 星
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
一维相控阵雷达是当今世界海军广泛应用的一种三坐标舰载雷达,该体制雷达方位角采用机械扫描,俯仰角采用相控电子扫描,具备海空探测能力,可为舰船防御武器提供高质量的三维目标信息。随着电子技术和软件无线电的发展,舰载一维相控阵雷达的阵面集成度越来越高,通常包含了雷达天线阵列、收发射频和中频通道、数字波束形成、混合数据光纤传输等模块,其阵面控制系统通常需要完成波束指向控制、收发通道幅相一致性校准、阵面工作时序控制和工作参数配置等功能,同时为了减轻天线阵面重量,阵面控制系统通常还需集成电子稳定平台解算功能,用以取代传统雷达的机械稳定平台。本文介绍了一种舰载一维相控阵雷达阵面控制系统的设计方案,针对电子稳定平台解算方法、收发波束指向控制,收发通道自动校准方法等关键技术进行了详细描述。
1 雷达阵面的组成
舰载一维相控阵雷达的天线阵面主要由雷达天线阵列、接收组件阵列、发射组件阵列、收发开关阵列、频率合成分机、波形产生模块、功分网络、数字波束形成模块、阵面控制系统等组成,其它还包括电源系统,环境控制系统、混合数据光纤传输系统等。阵面控制系统与阵面其它系统的连接关系如图1所示。
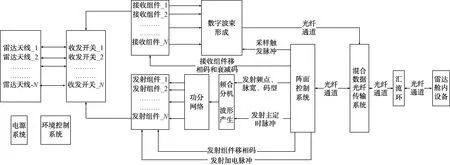
图1 雷达阵面组成部分及其连接关系
阵面控制系统需要完成天线阵列的电子稳定平台解算、收发波束指向控制、收发通道自动校准以及各种触发信号的产生等。收发波束指向控制包括发射组件移相码、接收组件移相码和衰减值的计算;电子稳定平台主要解决舰船在纵横摇的情况下,发射波束和接收波束仍然可以按照预定空域进行扫描;同时,由于各个收发通道存在幅相不一致性,阵面控制系统还需控制其它模块完成收发通道的一致性校准。
2 雷达阵面控制系统的关键技术
2.1 雷达阵面控制系统的组成及其工作流程
雷达阵面控制系统由定时触发模块、发射波束波位解算模块、接收波束波位解算模块、发射组件控制码计算模块、接收组件控制码计算模块组成。整个阵面控制系统的工作流程如图2所示。

图2 雷达阵面控制系统的工作流程
2.2 电子稳定平台的解算方法
舰船在风浪和浪涌的作用下,甲板坐标系坐标轴发生了旋转,假设横摇为β,纵摇为α,则:
oR=TRα·TRβ·oE
(1)
(2)

式(1)、式(2)给出了在纵横摇存在的条件下,甲板坐标系和大地坐标系之间的转换关系。假设某个重频周期,按照雷达预定的工作方式,在大地坐标系下,发射波束或接收波束的俯仰角为ε,而此时方位角为φ,根据极坐标系和直角坐标系的转换关系式(3),可得在大地坐标系下,其单位方向向量oE为:
(3)
假设此时横摇为β,纵摇为α,根据式(1),可以得到甲板坐标系下的方向向量oR的计算公式为:
(4)
根据式(5),即可得到在甲板坐标系的俯仰角:
(5)
重复式(3)、式(4)、式(5),即可计算出同一重频周期内,所有发射波束和接收波束在甲板坐标系的俯仰角。
2.3 收发通道幅度和相位的自动校准
为了满足相控阵雷达天线的低副瓣、高增益指标,对天线收发通道幅度和相位一致性有很高要求,同时对于校准好的天线阵面,收发组件的更换都有可能造成天线方向图的变化,因而需要寻求一种对天线阵面收发通道进行校准的有效方法。根据测量信号注入或获取点的不同,有源相控阵天线监测的方法分为2种:远场监测和近场监测。远场监测是指在距离阵列天线满足远场条件的地方放置监测装置(一般含辐射源和接收通道),利用该监测装置完成阵列天线发射通道和接收通道的校准。近场检测需要微波暗室的配合。在舰载雷达安装完成后,一般很难找到满足远场条件和近场条件的监测装置安装位置来进行远场监测和近场监测,所以研究利用雷达自身设备或少量辅助设备实时进行接收和发射通道的自动校准具有重要意义。下面以发射通道为例来介绍收发通道幅度和相位的自动校准流程[5]。
同时,为了给予幼儿潜移默化的影响,教师要积极引导和督促家长养成良好的阅读习惯,给幼儿做好榜样。还可以充分利用班级微信群、家园共育栏、家校共建活动等方法指导家长教给幼儿阅读的方法,如听读启蒙法、讲述故事法、提问回答法、角色扮演法,游戏比赛法等等。还可以通过各种活动,组织家长与幼儿一起进行亲子阅读,定期在幼儿园开展家庭故事会、亲子阅读活动展示等活动,评选书香家庭,让幼儿切实感受到阅读的快乐和魅力,进而引发他们对阅读活动的兴趣,培养幼儿爱读书,好读书,会读书的好习惯。
当雷达工作于校准模式下时,雷达阵面控制系统触发波形产生模块产生基带校准信号,该校准信号和频率合成器输出的射频信号进行混频,通过功分网络输出到待校准的发射通道,发射通道的输出在校正耦合网络的作用下,输出到标准校准接收组件,该接收组件完成对射频发射波形(和阵列天线的相位相同,幅度作固定衰减)的下变频,然后输出中频信号到阵面控制系统的模/数(A/D)转换电路,阵面控制系统完成A/D转换、数字下变频、正交接收后得到此发射通道的IQ支路输出,通过计算得到该发射通道的幅度值和相位值;在一个发射通道校准完成后,切换到下一个待校准的发射通道,依次完成所有发射通道的校准工作。完成一个发射通道的校准流程仅需几个毫秒,对于规模不大的舰载一维相控阵雷达,完成整个阵面所有发射通道的校准工作仅需数秒,可以认为在该段时间内,所有发射通道和标准校准接收组件的外部工作温度条件相同,因而利用此方法得到的发射通道幅度值和相位值即可作为发射阵面的校准值。

图3 发射通道幅度和相位的自动校准原理
接收通道与发射通道的校准原理基本相同,区别仅在于用同一个标准校准发射组件发射射频波形,然后利用校准耦合网络依次耦合到待校准的接收通道,最后完成A/D转换、数字下变频、正交接收等一系列处理,从而得到接收通道的校准值。
2.4 收发波束控制方法[6-7]
假设舰载一维相控阵雷达天线阵列如图4所示,在YOZ平面内,各相邻单元在Z方向上的间距为d,根据相邻单元之间信号的“空间相位差”与“阵内相位差”相等的原理,算出阵列中第k行天线单元(k=0,1,2,…,m-1) 波控码Ck相对于第0列天线单元的波控码C0:
(6)
Ck=(k+1)C0
(7)
式中:k=0,1,2,…,m-1;N为数字式移相器的计数位数;λ为发射波长;εR为雷达在仰角上的扫描角度,其范围是-π/2<θB<π/2。
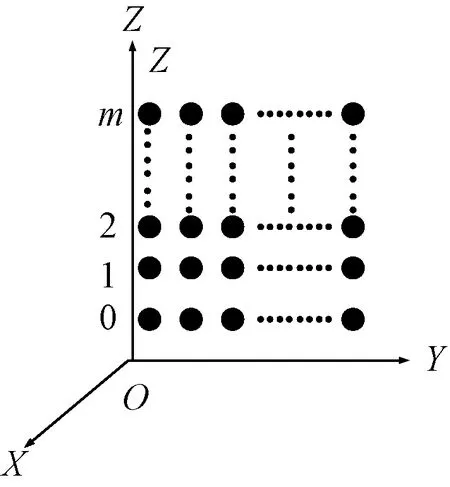
图4 舰载一维相控阵雷达天线分布
进一步考虑到组件的初始相位的不一致性和非线性温度补偿,将式(7)修改为:
Ck=(k+1)C0+δ(k)
(8)
式中:δ(k)为第k行的校准值。
收发波束的布相方法主要有查表法和计算法2种。考虑到数据存储量和现场可编程门阵列(FPGA)计算的便利性,在本控制系统中采用查表法和计算法相结合的方法进行波控码的计算,具体计算流程如下:
(1) 由电子稳定平台解算得到的雷达天线阵面波束俯仰角εR,发射频点查表得到第0列天线单元的波控码C0;
(2) 查表得到第k行组件的校准值δ(k);
(3) 根据式(8),利用FPGA计算得到第k行的波控码Ck;
(4) 在定时脉冲的驱动下,将组件的控制码加载到所对应的控制组件。
3 结束语
本文论述了一种舰载一维相控阵雷达阵面控制系统的设计方法,对阵面控制系统需要解决的电子
稳定平台、收发通道幅相的自动校准和收发波束控制方法进行了详细的论述,同时该控制系统具有集成度高、重量轻、成本低等优点,具有一定理论价值和工程价值。
[1] 栾铸徴,陈舒敏,吴俭.舰载一维相控阵雷达波束电子稳定研究[J].现代雷达,2013,35(8):14-18.
[2] 方成一,王振旺.舰载雷达天线电子稳定方程的推导方法[J].雷达与对抗,1999(2):68-74.
[3] 冯同玲,陈龙潭.舰载雷达天线电子稳定方程的推导与分析[J].火控雷达技术,2001,30(1):31-36.
[4] 曹正才.舰载雷达常用稳定方式坐标变换[J].雷达与对抗,2010(3):47-52.
[5] 宋虎,李赛辉,刘剑,将迺倜.一种数字阵列雷达幅相检测校准的新方法[J].雷达与对抗,2015(1):29-33.
[6] 简育华,付学斌,席安安.波束控制算法在FPGA中的实现[J].火控雷达技术,2009,38(4):57-61.
[7] 吕大鑫,冯彩霞,徐晓瑶.基于DSP的高速相控阵波束控制器设计[J].舰船电子对抗,2014,37(10):118-120.