面向船舶维护和监测的爬壁机器人设计
2018-06-14姜红建高振飞杜镇韬王斌
姜红建, 高振飞, 杜镇韬, 王斌
(1.浙江大学海洋学院,浙江舟山316021;2.金海重工股份有限公司,浙江舟山316021)
0 引言
船舶(图1)在海洋中航行一段时间后,由于海水的腐蚀及海洋环境中杂物的附着,船壳表面会累积海生物、油污及铁锈,船壳表面的油漆已达不到保护作用,需要进入船坞进行除锈处理,以便再次涂装[1-3]。同时,船舶作为大型承载机械装备,长时间承受货物的重力负载、海洋风浪流等环境负载,自身也需要定期地做外板检测,以便发现损伤以做及时处理。目前,国内修造船厂的上述作业任务多依赖人工,劳动强度大、作业效率低、作业质量较差,且人力成本逐年递增。因此,设计一种面向船舶外板维护和监测的爬壁机器人,显得十分必要。
目前,国外已研制多款船舶爬壁机器人产品,如图2所示,广泛地用在船舶外板维护和检修等作业场合,极大地提高了作业效率。本文提出另外一种爬壁机器人结构,通过平面永磁铁产生吸附力,进而克服机器人自重和负载的影响,完成在船舶壁面上的吸附及爬行。

图1 远洋运输的船舶
1 爬壁机器人总体结构
如图3所示,本文所提出的爬壁机器人采用轮式行进方式,相比履带式具有结构紧凑、转弯灵活、质量较轻等优点。同时,相比真空式或电磁式吸附原理,永磁式吸附具有负重能力较大、对作业表面形貌要求较低、失电安全性高等优点,故采用永磁式吸附机构。其中,永磁铁提供足够吸附力以克服机器人自重和负载,使机器人能够可靠地贴附在外板上;伺服电动机直驱主动轮,克服摩擦阻力而完成行进动作。同时,该爬壁机器人安装有超高压旋转喷头组件和真空清洗盘,能够实现除锈和含锈废水的回收。
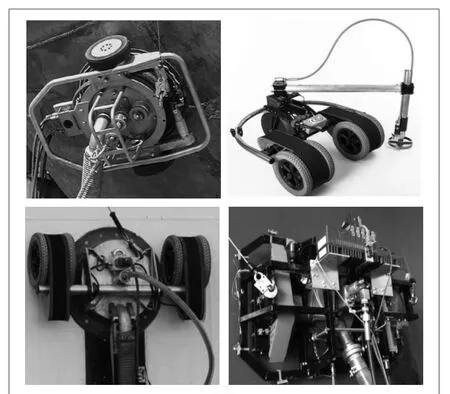
图2 国外船舶爬壁机器人
2 力学分析
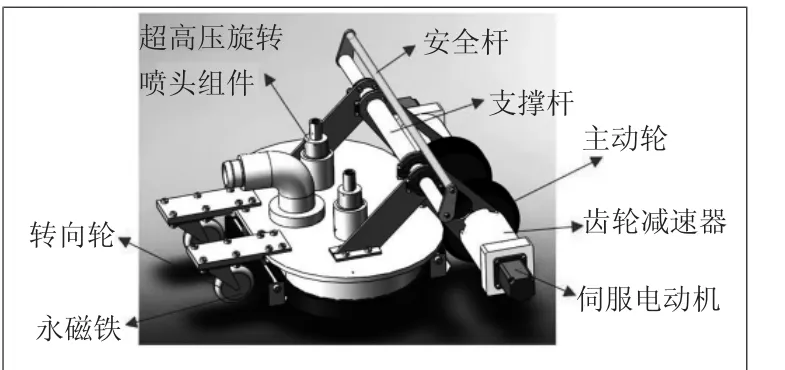
图3 爬壁机器人的总体结构
本部分是通过计算来确定爬壁机器人在作业过程中对永磁铁吸力的要求,同时确定爬壁机器人驱动电动机的最大功率,进而为爬壁机器人研制提供依据。其中,相关参数如表1所示。
图4和图6所示分别为爬壁机器人的静力学和动力学分析示意图(此处只取一个轮子为分析点)。其中:F为电动机通过减速器输出的牵引力;FN为船体对机器人的支持力;G为本体与负载的重力;Fm为单个磁铁的吸附力;Fs为清洗盘负压所产生的负压吸附力;Ff为射流反冲力;α为船体与地面的倾角;μ为两者之间摩擦因数。
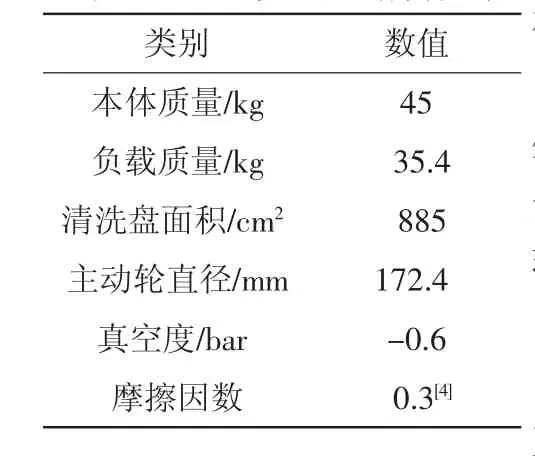
表1 爬壁机器人结构参数
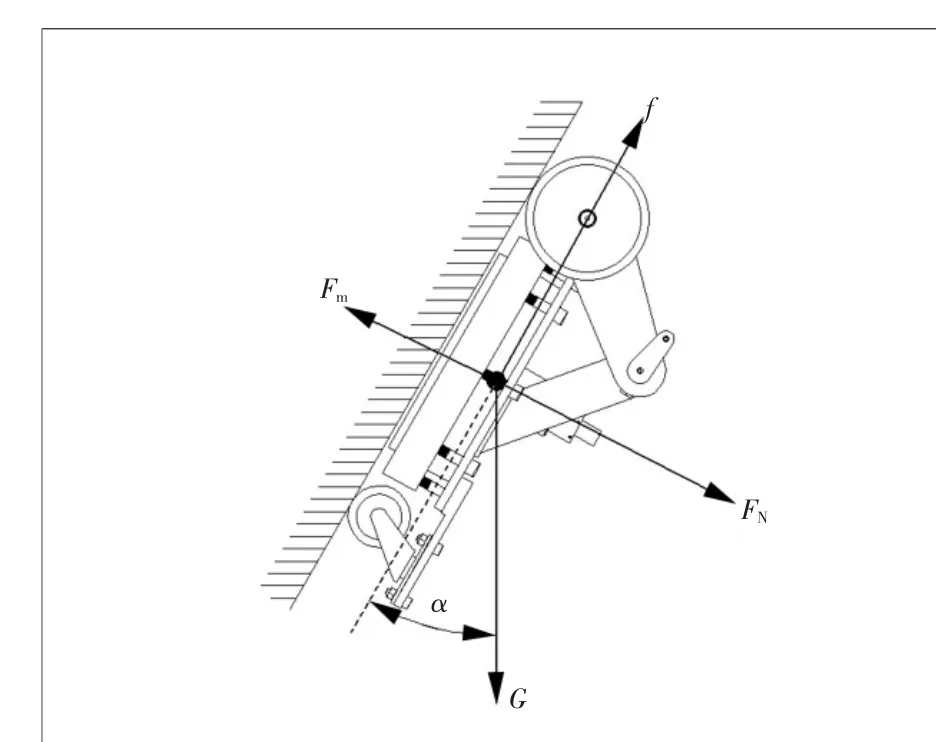
图4 机器人静力学受力图
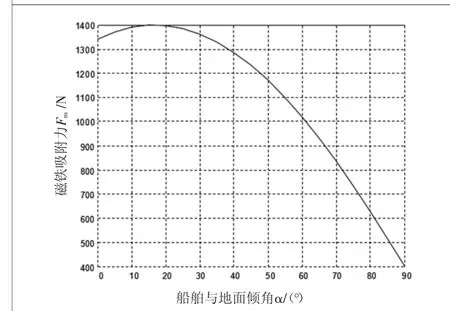
图5 磁铁吸附力与船舶倾角曲线图
2.1 机器人静止不下滑
机器人的静力学和动机器人静止在船体上条件为:机器人所受静摩擦力大于等于重力沿船体的分量,即
其中,摩擦力f=μFN,单个磁铁的吸附力,静摩擦因数取0.3,由此单个磁铁的吸附力
图5中,船舶与地面倾角α约为20°时,所需 磁铁吸附力最大,最大吸附力约为1399 N。
2.2 机器人上爬所需转矩
机器人上爬过程中(图6),电动机输出的牵引力需要克服滚动摩擦力和重力沿船体的分量,即:其中摩擦力f=μFN,安全系数取 1.2,减速器输出额定转矩 T=1.2F·R。
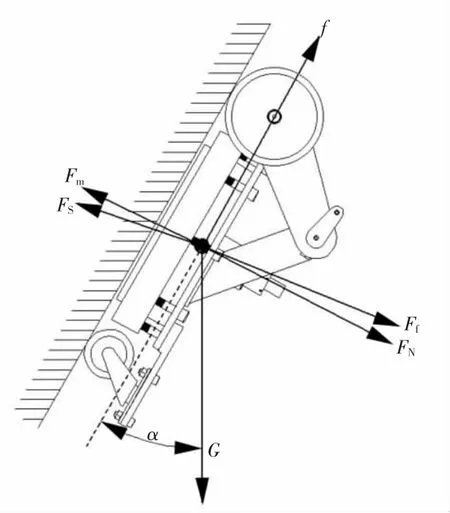
图6 机器人动力学受力图
摩擦因数取 0.3,由此得

电动机所需额定转矩(减速比 i为 200,电动机和减速器传递效率取η=0.9),电机所需额定功率P=T′n。9550
图7中,船舶与地面倾角α为0°时,减速器所需输出转矩T最大,最大值为162 N·m。
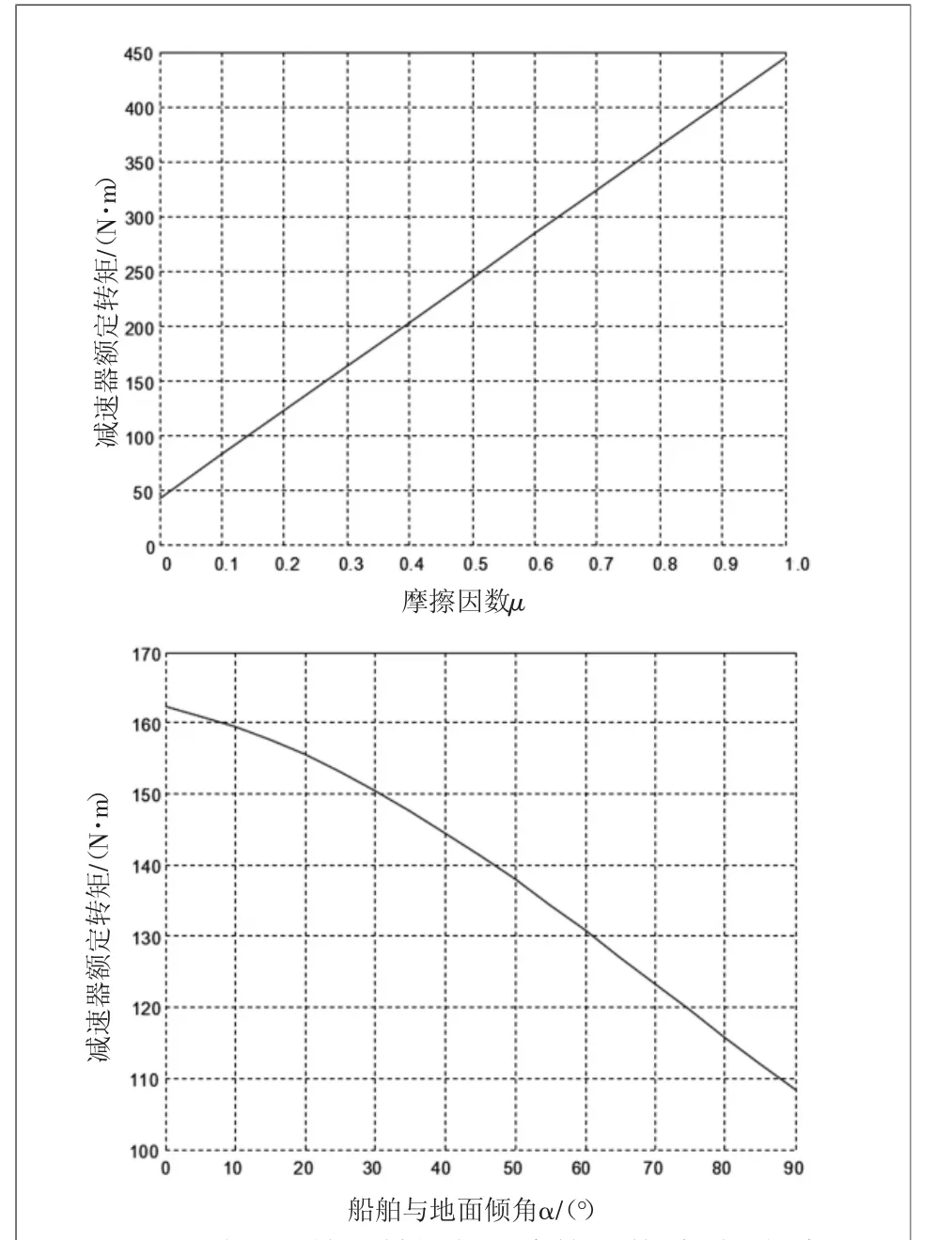
图7 减速器输出转矩与动摩擦因数、倾角关系
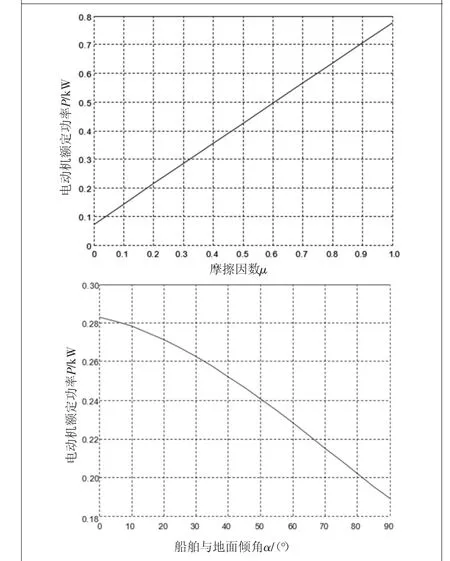
图8中,船舶与地面倾角α为0°时,电动机所需额定转矩最大,最大值为0.9 N·m,小于电动机额定转矩1.27 N·m。图9中,船舶与地面倾角α为0°时,电动机所需额定功率最大,最大值约为0.28 kW,小于电动机额定功率400 W。
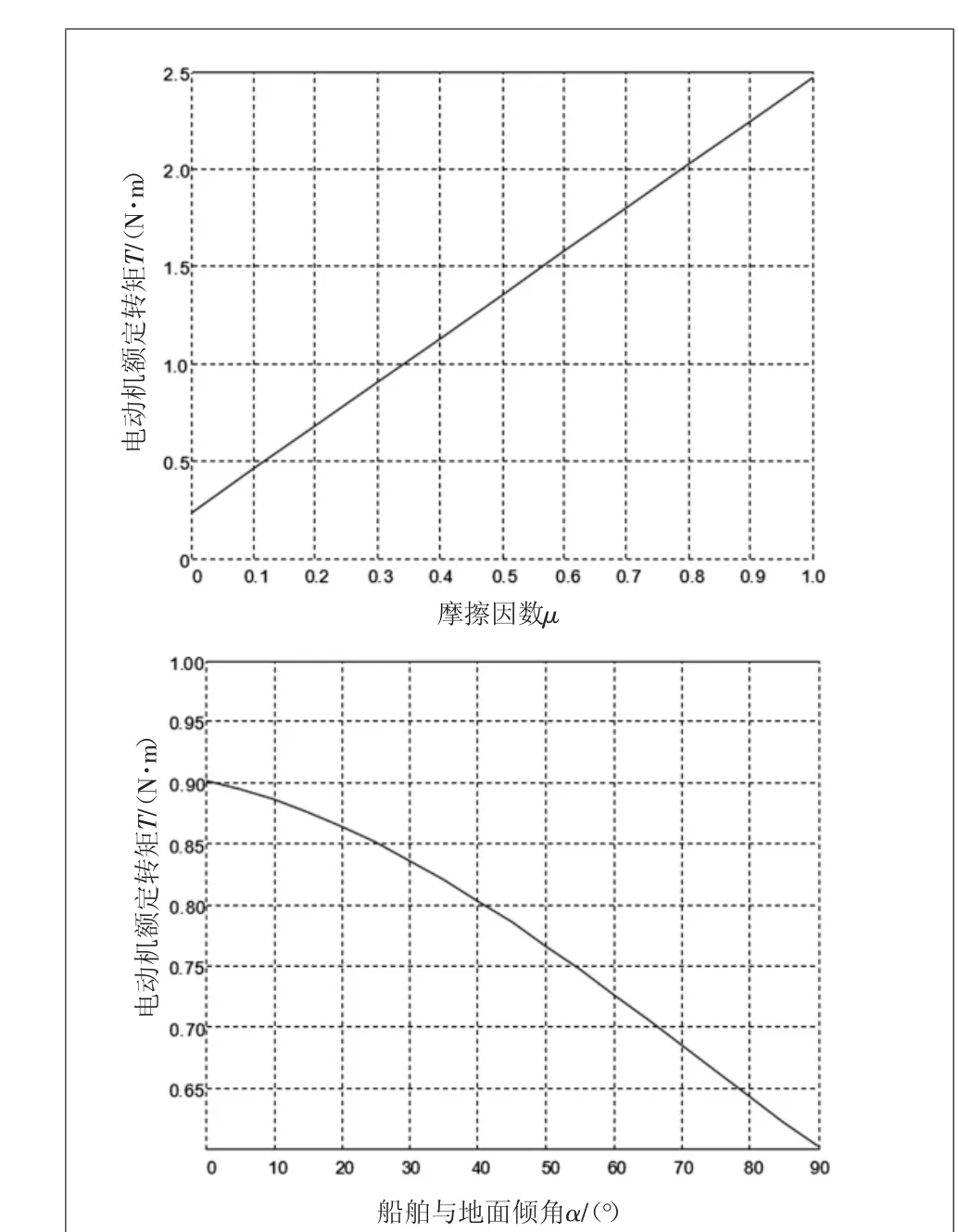
图8 电动机输出转矩与动摩擦因数、倾角曲线图
机器人启动时,电动机输出牵引力需要克服静摩擦力与重力沿船体分量,此时静摩擦因数取0.5,真空回收系统真空度取-0.06 MPa,椭圆清洗盘面积s=88 467 mm2,由此得减速器输出转矩242 N·m。电动机所需启动转矩为1.35 N·m,电动机堵转转矩为4.46 N·m。
3 结构仿真
爬壁机器人的总体结构如图3所示。其中,主动轮为铝制轮毂,外层为橡胶,在保证良好强度的同时减少摩擦阻力,以降低驱动功率;2个主动轮为内侧布置,进而保证钢板边缘的有效清洗;支撑杆作为整个机器人的骨架,通过相应零件将轮系、清洗盘等零部件集成在一起,并安装有安全杆,为安全绳提供挂点。
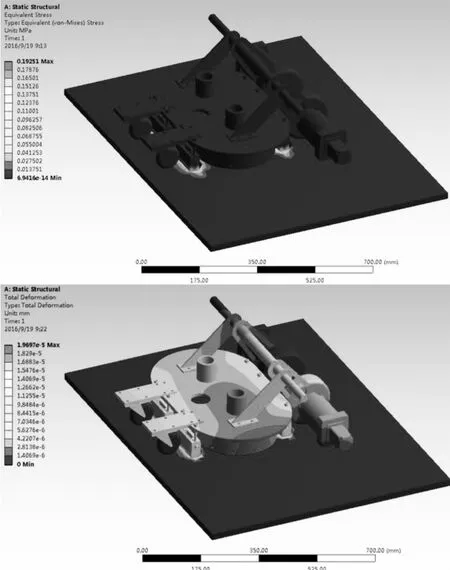
图10 爬壁机器人本体结构仿真计算
考虑永磁铁实际加工工艺,永磁吸附机构分为4个单元。根据磁场仿真,每个单元在气隙1.5 mm下的吸附力约844 N,总的吸附力约满足3376 N,满足机器人静止不下滑所需的吸附力(2.1节所计算得到的吸附力应不小于2798 N)。
根据永磁铁吸附力仿真数值,建立爬壁机器人本体的结构有限元模型,得到应力和变形的分布如图10所示。可知,本体的最大应力发生在永磁铁保护罩,此处由于钢板较薄,应力较大,但应力数值约0.19 MPa,远小于材料的抗拉强度;最大变形发生在清洗盘外边缘,数值约2×10-5mm,变形可忽略不计。所以本体结构强度满足要求。
4 结语
本文设计了一种面向船舶维护和监测的爬壁机器人,分析其静力学和动力学特性,获得了磁吸附力和电动机驱动转矩的数值,进而对机器人整体结构做了有限元分析,为后续机器人研制提供了理论支撑。
[1]薛胜雄.超高压水射流自动爬壁除锈机理与成套设备技术[D].杭州:浙江大学,2005.
[2]衣正尧,弓永军,王祖温,等.用于搭载船舶除锈清洗器的大型爬壁机器人[J].计器人,2010,32(4):560-567.
[3]孙玲.除锈爬壁机器人壁面行走控制技术研究[D].大连:大连海事大学,2015.
[4]成大先.机械设计手册[D].北京:化学工业出版社,2004.
[5]衣正尧,弓永军,王兴如,等.船舶除锈爬壁机器人设计方案研究[J].机床与液压,2010,38(7):21-25.
[6]薛胜雄,任启乐,陈正文,等.磁吸式爬壁机器人的研制[J].机械工程学报,2011,47(21):37-43.
[7]徐泽亮,马培荪.永磁吸附履带式爬壁机器人转向运动灵活性分析[J].上海交通大学学报,2003,37(11):4-9.
