基于粒子滤波的复杂背景下的红外运动目标跟踪*
2018-06-13王海梅
王海梅,洪 敏
(南京理工大学自动化学院,南京 210094)
0 引言
红外目标跟踪技术依靠红外传感器感应目标辐射得到红外图像序列,它不受夜间光照条件限制,可以全天候工作,在民用、军事领域都有着重要的作用。然而,相对于可见光图像,红外图像也有其明显的弱点,如信噪比低,目标特征单一(一般为灰度特征),容易与背景混淆,特别是当目标处于复杂背景下时,传统的跟踪方法常常会发生跟踪不准确甚至误跟、漏跟的情况。
粒子滤波算法作为一种非线性滤波技术,对非高斯背景的非线性随机系统有很好的适用性[1]。经典的粒子滤波跟踪算法在对红外图像序列中的目标进行跟踪时,其观测模型通常只选取红外目标的灰度特征,这一方法对于一些背景简单的目标跟踪有着不错的效果,但当目标处于复杂背景下,如背景与目标具有相似的灰度等级、光照变化强烈或者目标自身属性发生变化、遮挡等情况时,粒子滤波的准确性和稳定性都会降低。为了克服经典粒子滤波算法应用的局限性,文中探讨了融合目标灰度与运动特征的粒子滤波算法,并应用该算法研究了遮挡及有相似干扰两种情况下红外运动目标的跟踪问题[1-5]。
1 基于灰度和运动特征的联合观测模型
1.1 带有空间信息的灰度特征提取
在基于粒子滤波的目标跟踪算法中,目标模板的选取对目标的跟踪性能有决定性的影响。红外目标最显著的特征就是其灰度特征,但传统的灰度直方图模型只包含了当前帧中相应区域的灰度分布信息,如果将像素的空间位置信息也加入到灰度直方图中,显然目标将得到更好的描述。一般的红外图像,其灰度等级L=256,为了提高跟踪效率,将灰度级映射为H=32级[2]。假设目标所在区域的像素为{xi}i=1,…,M,M 为目标区域包含的像素总数,则目标的灰度概率分布为q={qu}Hu=1,并且有:

其中,b(xi)是点xi处的灰度值特征映射函数,u为目标图像的特征值。
对于像素的空间分布信息,这里认为一个像素点对目标特征描述的作用与它和目标中心点的距离成反比,即距离越近对目标特征描述的作用越明显。因此,对于目标所在区域的像素点,可以用式(2)所示的加权核函数来定义其作用大小,其中,r是像素到目标中心的距离。

假设参考目标中心位置为x0,xi为目标区域中的任一点,则目标模型的带有空间位置信息的灰度概率分布为:

其中,Cq为归一化系数,令,使得为目标区域大小。
同理,可以得到当前帧中心位置为y处候选目标的带有空间位置信息的灰度概率分布,

其中,表示候选目标区域的像素点。
利用Bhattacharyya系数定义候选目标与目标模板带空间信息的灰度模型之间的距离测度:

其中,越小,则两个直方图之间的相似度越高。
由此可得带有空间信息的灰度特征观测概率模型:

其中,σ为经验系数,可以根据跟踪性能来选取,通常取[2,10]。
1.2 红外目标运动特征提取
对于复杂背景下的红外运动目标,单一的灰度特征有时很难将目标从周围的强干扰中识别出来,为了提高跟踪算法的鲁棒性,文中在利用红外目标灰度特征的同时,还运用帧间差分法提取目标的运动特征,将两者融合用于红外目标的跟踪。
红外目标运动特征的提取步骤如下:
1)利用帧间差分法计算差分图像

对图像上的每个像素(i,j),计算第k帧图像fk与第k-1帧图像fk-1之间以该像素为中心的3×3范围内所有像素的绝对差之和,并赋给该像素。该方法可以尽可能多地填充帧间差分图像中运动区域内的空隙,使目标信息更加充分。
2)计算第k-1帧和k-2帧的差分图像,对两个差分图像和取平均值,以此来抑制图像中的噪声:。
3)对差分图像Dk中的像素进行运动像素判定
设定判别阈值为为 Dk的均值,σ 为 Dk的标准差,k为经验系数,一般取[1,3]。如果Dk中的像素值大于阈值,则令其为1,表示该像素可能是运动像素,否则令其为0。由此可以得到运动差分图像Id:

4)对Id中值为1的点进行目标点判定
将Id中所有值为1的运动像素与目标灰度进行比较,灰度接近则判定为目标点。这里将目标模板的灰度直方图作反向投影得到灰度的概率分布图Ig[3],最后将Id与Ig相乘得到融合了灰度信息的运动概率分布图 Im,即:Im=Id×Ig。
5)获取候选目标运动特征
用Im中候选目标区域的零阶矩G来衡量候选目标与目标的匹配程度,G越大,匹配程度越高。

综上所述,基于红外目标运动特征的观测概率模型可以表示为:

其中,为目标区域像素点总数。
1.3 联合观测模型建立
在分别建立灰度特征与运动特征观测模型的基础上,通过加权的方法将两个观测模型进行融合,得到一个联合观测模型,用以更新当前帧中粒子的权值,其形式如式(11)所示:

其中,α为权值,α∈[0,1],当灰度特征较为明显时,增大α,使得联合观测模型中的灰度特征发挥更大作用;当目标处于强干扰环境中时,减小α,增强联合观测模型中运动特征的地位。
2 基于灰度-运动特征的粒子滤波算法描述
基于灰度-运动特征的联合观测模型的粒子滤波算法描述如下:
1)粒子采样。从初始帧手动提取目标模板,得到目标的初始状态参数,并在目标附近随机选取N个粒子,初始化粒子权值。
2)粒子状态转移。考虑到运动目标的状态传播具有加速度,所以采用如式(12)所示的二阶ARP模型作为状态转移模型:

其中,是粒子随机传播的半径,,这样粒子集从k-1时刻的转移到k时刻的。
3)粒子更新。根据联合观测模型来衡量粒子所代表的状态与目标真实状态之间的相似程度,相似度越高相应权值越大,然后计算粒子权值并归一化。
观测模型:

粒子权值:

归一化权值:
4)重采样,避免粒子退化。这里采用相对效率的一种近似测量尺度,即有效样本数Neff来度量,Neff越小,退化现象越严重[4],如果有效样本数Neff小于设定阈值,即:,则进行重采样。重采样过程采用随机采样方法。
5)目标位置确定。通过粒子加权和来估计当前帧目标的状态并更新目标的灰度模型。

3 目标跟踪算法的实现
实例1:严重遮挡情况下红外人体目标的跟踪
红外图像序列1:存在树木对人体的完全遮挡,279帧,大小为320×240。在初始帧中手动提取目标模型,目标中心为(9,118),大小为 10×30,初始化粒子数N=100,图1为基于经典粒子滤波算法的目标跟踪结果。
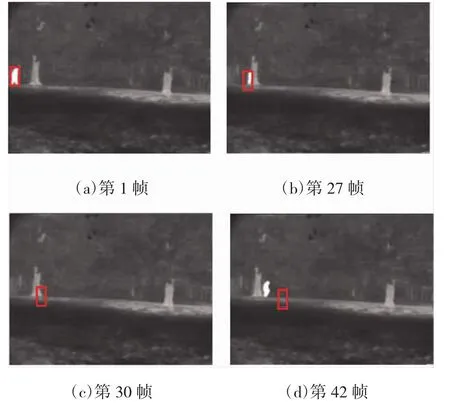
图1 经典粒子滤波算法的跟踪结果
从图1可以看出,经典粒子滤波算法在目标被部分遮挡情况下(第27帧)跟踪出现了一些偏差,当目标被完全遮挡时(第30帧),跟踪误差较大,当目标重新出现时(第42帧),已经无法进行跟踪。分析跟踪丢失的原因,主要是因为当目标被严重遮挡时,粒子包含的目标状态不可靠而造成的。
采用基于灰度-运动特征的粒子滤波算法进行目标跟踪。灰度量化级数H=32,初始化粒子数N=100,考虑到对象为红外目标,联合观测模型中运动信息发挥主要作用,故取系数α=0.3。图2显示了运动概率分布图的获取过程(以第69帧图像为例)。为显示需要,将值为1的点映射为255(白色),值为0的点仍然是0(黑色)。

图2 运动信息提取过程
基于灰度-运动特征的粒子滤波算法的目标跟踪结果如图3所示。
从图3可以看出,基于灰度-运动特征的粒子滤波算法在目标被部分遮挡时(第27帧),能很好地跟踪目标,当目标被完全遮挡时(第30帧),给出了目标的估计位置,当目标从遮挡物中走出时(第42帧),能快速复原并恢复对目标的稳定跟踪。可见融合灰度与运动信息的粒子滤波跟踪算法成功解决了完全遮挡情况下目标的跟踪问题。
实例2:相似灰度干扰情况下红外人体目标的跟踪
红外序列2:背景中存在与目标灰度相似的干扰,如花坛中的白色物体和路灯灯杆,186帧,大小为320×240,目标模型为15×33,经典粒子滤波算法及基于灰度-运动特征的粒子滤波算法的目标跟踪结果如图4所示(参数设置与实例一相同)。
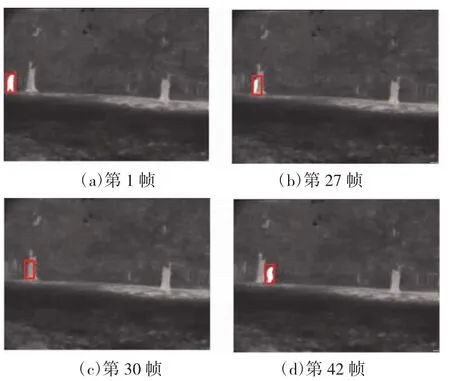
图3 基于灰度-运动特征的粒子滤波算法的跟踪结果
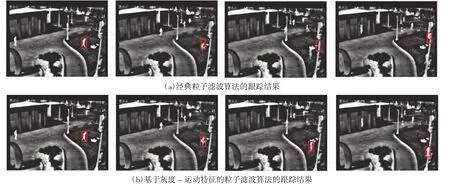
图4 序列2的目标跟踪结果(从左到右依次是10、81、128、183帧)
由于经典粒子滤波算法只利用了目标的灰度信息,因此,背景中与目标灰度相似的干扰,如花坛中的白色物体、路灯灯杆等对跟踪效果影响非常大。当目标进入干扰区域(第81帧)时,跟踪出现偏差,随后误差越来越大,最终跟踪失败。而基于灰度-运动特征的粒子滤波算法,由于增加了目标的运动信息,消除了静止不动的干扰,实现了目标的准确跟踪。
以实例1为例,对上述两种算法的单帧处理时间进行了统计,经典粒子滤波算法、基于灰度-运动特征的粒子滤波算法的单帧平均处理时间分别为0.1248 s、0.1532 s,说明后者在目标特征信息提取方面花费了更多的时间。
4 结论
经典粒子滤波算法在对红外目标进行跟踪时,只利用了目标的灰度特征,当背景较为复杂时,很容易丢失目标,为解决上述问题,文中对基于目标灰度及运动特征的粒子滤波算法进行了研究。实验结果表明,基于灰度-运动特征的粒子滤波算法与经典粒子滤波算法相比,虽然在效率上略有降低,但跟踪精度与稳定性却大大增强。
[1]夏楠,邱天爽.一种卡尔曼滤波与粒子滤波相结合的非线性滤波算法[J].电子学报,2013,41(1):148-152.
[2]王鑫,唐振民.基于特征融合的粒子滤波在红外小目标跟踪中的应用[J]. 中国图象图形学报,2010,15(1):91-97.
[3]SHAH C F,WEI Y C,TAN T N.Real time hand tracking by combining particle filtering and mean shift[C]//Proceedings of the IEEE Intemational Conference on Automatic Face and Gesture Recognition,2004:669-674.
[4]NUMMIARO K,KOLLER M E,GOOL L V.An adaptive color-based particle filter[J].Image and Vision Computing,2003,21(1):99-110.
[5]胡颖.一种改进的均方根容积粒子滤波算法[J].火力与指挥控制,2016,41(1):104-108.