Study on the Reduced Traffic Congestion Method Based on Dynamic Guidance Information∗
2018-06-11ShuBinLi李树彬GuangMinWang王广民TaoWang王涛HuaLingRen任华玲andLinZhang张琳
Shu-Bin Li(李树彬), Guang-Min Wang(王广民),Tao Wang(王涛),Hua-Ling Ren(任华玲), and Lin Zhang(张琳)
1Department Traffic Management Engineering,Shandong Police College,Jinan 250014,China
2School of Economics and Management,China University of Geosciences,Wuhan 430074,China
3School of Automation and Electronic Engineering,Qingdao University of Science and Technology,Qingdao 266042,China
4School of Traffic and Transportation,Beijing Jiaotong University,Beijing 100044,China
5School of Transportation,Southeast University,Nanjing 210096,China
1 Introduction
Currently,the social economy has entered a new period of rapid development in China,the major contradiction is the relationship of the rapid growth of urban car ownership and the slow growth of road construction.Then,a series of traffic problems are triggered such as environmental pollution,traffic safety,transportation energy consumption etc.One of the most prominent problem is the urban traffic congestion and its negative impact.To control the urban traffic congestion,one must find the evolution rules of traffic congestion and dynamic motion law of traffic flow.Moreover the integrated structure of induction-control and evaluation must be established.
The information of the urban intelligent transportation system(ITS)generated in traffic network is sent to travelers,the travelers can select the best route for themselves.The induced information can balance the traffic flow on time and space aspect,which make the traffic system more efficient in the whole urban traffic network.
Traffic information induced model has been studied based on game theory[1−2]and fuzzy clustering theory.[3]Some scholars proposed the intelligent algorithm based models[4−5]and analyzed the effect of vehicle behavior on the network.[6−7]Considering the real traffic in China,local scholars proposed some methods of the Locating VMS(Variable message signs)under ATIS(Advanced traveler information system)environment.[8−14]Other scholars have studied traffic demand,traffic supply,and simulation technology.[15−24]In particular,the team of Ben-Akiva made a lot of outstanding achievements.In these studies,the purpose of traffic control is to relieve network congestion.However,most of the existing methods have not fully demonstrated the effectiveness.Meanwhile,the previous studies only focus on homogeneous traffic flow.Unfortunately,those method cannot solve the traffic problem in China due to mixed traffic flow leads to more complex traffic phenomenon.Then,a new method is needed to relieve traffic congestion based on dynamic traffic information.
In this paper,the mesoscopic traffic simulator is designed firstly which can generate the real-time traffic prediction information.However,the information do not immediately be sent directly to users on the network.In contrast,the information is sent to the “virtual” users of the mesoscopic traffic simulators.Then,the user’s behavior responded to the information can be modeled based on the choice model.At the same time,the simulator can obtain the operation condition of the road network by the virtual user experience.If the actual condition does not be consistent with the simulated condition,a set of algorithms are used to correct the predict road conditions and continuous iteration until the virtual users “satisfaction”in simulator.At this point,the only officially traffic forecast information is released to the real-world users on the network.In other words,the actual released information is “foresight”,it is generated based on the response of the travelers for the forecast information.
2 The Mesoscopic Traffic Simulator
The mesoscopic traffic simulator needs to ensure the accuracy and the efficiency of the calculation.[25−29]In other words,the simulator not only meets the requirement of the accuracy in simulation but also takes into account the requirement of running speed in order to the real-time online application.In the simulator,the key technology is the mathematical models including road network model,static queuing model,velocity model,and vehicle movement model.
2.1 The Road Network Model
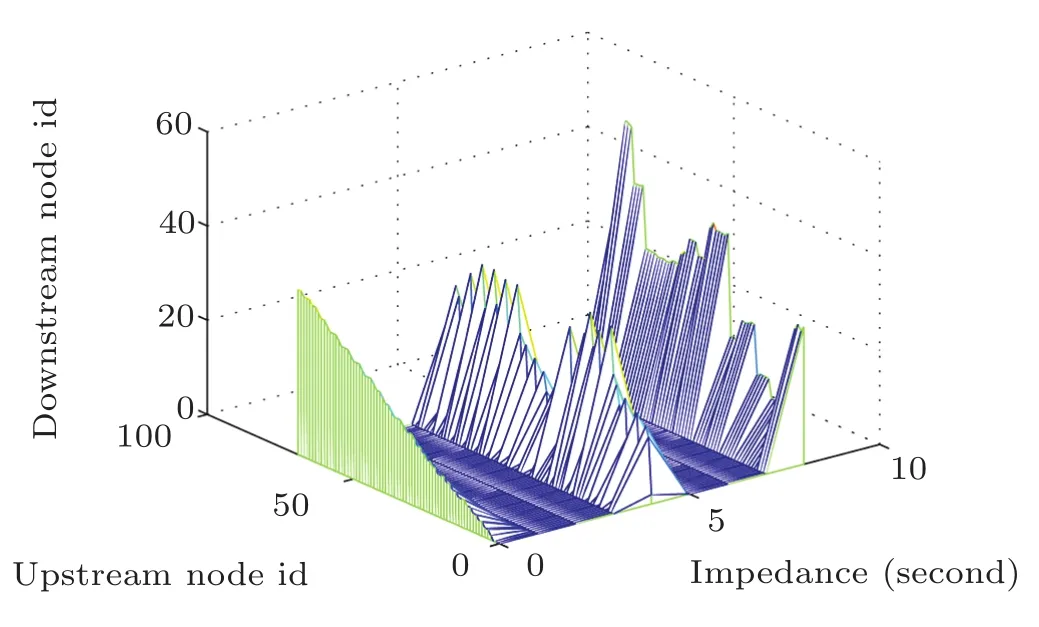
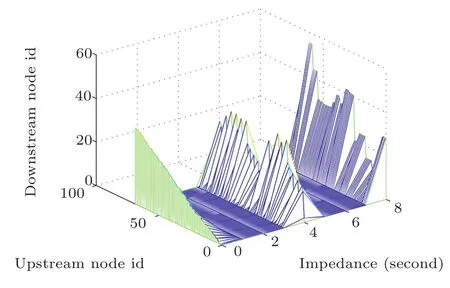
The road network model is used to describe the composition of the urban road network,which mainly consisted of node,connected line,line group,line,detectors,turning prohibition line,signal control equipment,traffic zones and so on.The urban road network topology is composition of nodes and connected lines,as shown in Figs.1–2.VMS is Variable Message Signs and VSLS refers to the variable limit speed system.

Fig.1 Road network topology.
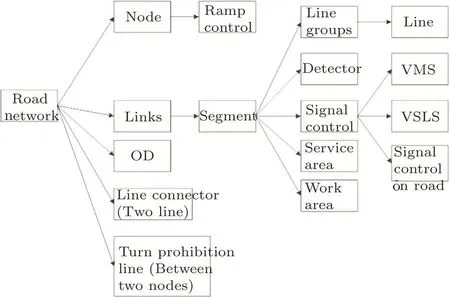
Fig.2 The relationship between network elements.
2.2 The Deterministic Queuing Model
The deterministic queuing model describes queuing behavior of vehicles at the intersection including the vehicles into the queuing,moving in the queue and leaving the queue.The queuing delay of the i-th vehicle in the queue is:

where c is the output capacity of the lane group.During a period of time t,there are ct vehicles leaving the queue.If a moving vehicle reaches the end of the queue at time t,its position(and,therefore,the position of the end of the queue)will be

where q(0)is the end position of the queue at time t=0;lcar=1/ρjamis the average length of vehicles including headways;Normally,the truck and bus can be converted to the standard car;ρjamis jam density;m is the number of moving vehicles between the considered vehicle and the queue at time t=0;
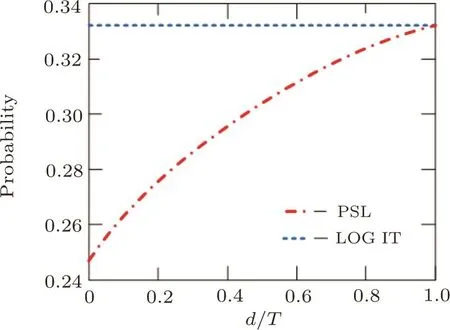
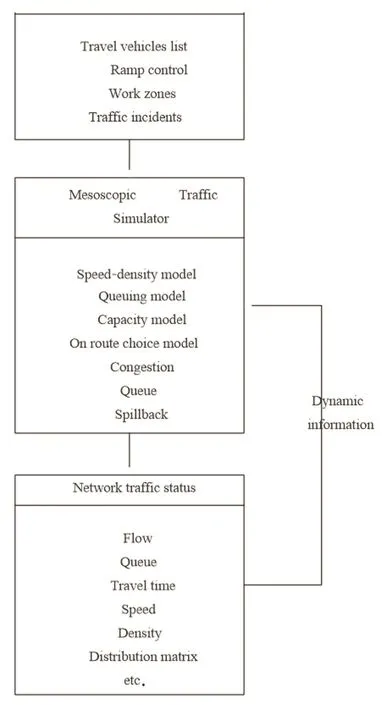
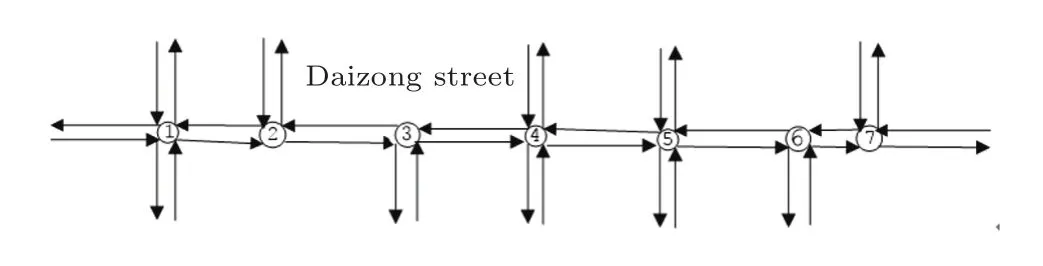
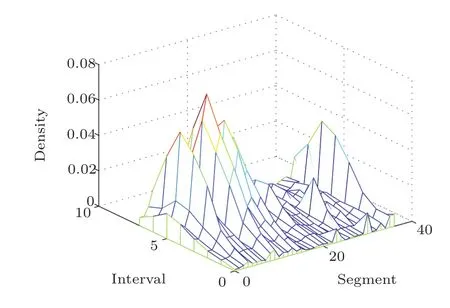
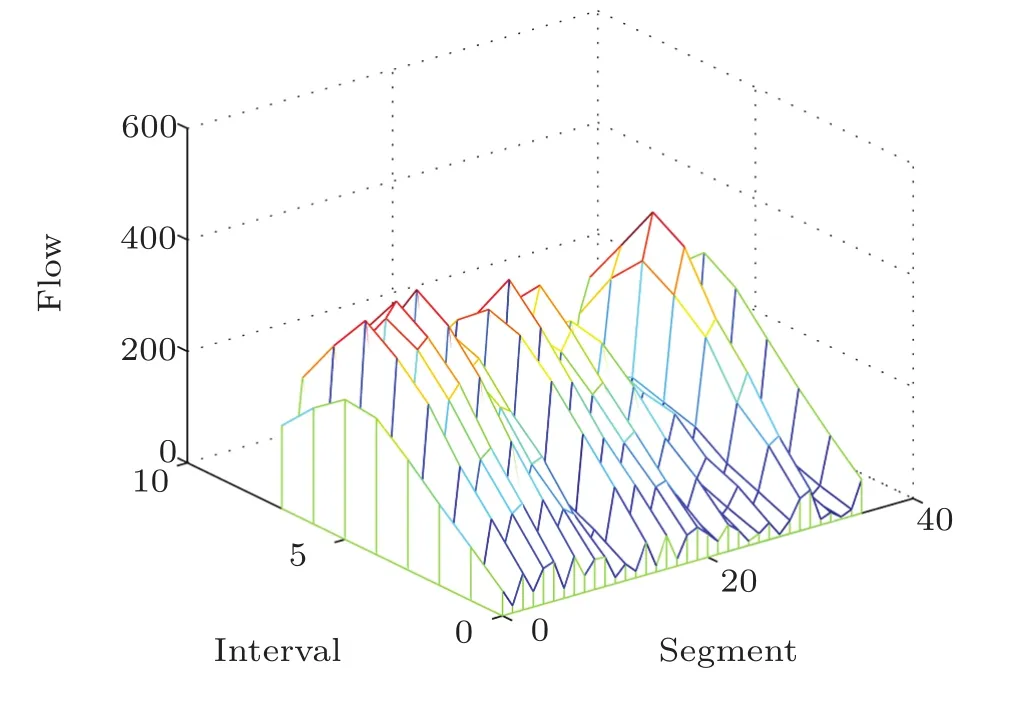
Note that there are three cases:when 0 The case q(t)<0 will never occur. The case q(t)>L means that the queue is already dissipated when the vehicles reached the end of the segment. The anisotropic mesoscopic simulation(AMS)model means that at any time,a vehicle’s prevailing speed is influenced only by the vehicles in front of it,including those that are in the same or adjacent lanes and the influence of traffic downstream upon a vehicle decreases with increased distance.So,the velocity of the moving vehicle can be determined by the traffic density in a certain area in front of it.The area is known as speed influencing region(SIR)as shown in Fig.3. Fig.3 The relationship between network elements. A moving vehicle’s speed is determined by the traffic density within the SIR and calculated by k-v relational model.As shown in Fig.3(a),the first case is the consistent physical property of road,the SIR density is: where n is a number of lanes in SIR;is the vehicle number in SIR at time t−1 for a vehicle i;l is the length of SIR.In the cases of Figs.3(b)and 3(c),the density is calculated by the following equation: where kjamis the jam density of the segment.The current speed of one vehicle i is obtained by the following exponential function: is the speed of the vehicle i at time t;is the free flow speed on the segment;vminis minimum speed;α,β are model parameters.The speed-density relation model as the following Fig.4. Fig.4 Speed-density curve in SIR. The model describes the vehicle’s movement on the segment.In the case of no queuing,when time t=0,the vehicle located at z0,then when the vehicle reaches z the time is t(z),the relationship is as follows: where λ is determined by the following equation:vdis the downstream speed on the segment;vuis the upstream speed on the segment;Lsis the length of segment s.In case of t=0,the vehicle at position z0,then the vehicle’s positon at time t is: If there is a queue when the vehicle reaches the position z(t),then z(t)is determined by the following equation at any time t: where q0,l,c,m are defined as mentioned. The most of traffic information guidance strategies are based on current traffic situation or posted information which is not sufficient to describe the time varying traffic network conditions.It is a kind of passive control strategy.It maybe cause overreaction for the information which can result in the opposite effect.One of the answers is to predict the traffic situation based on the current traffic information.So the predicted information can be put into the mesoscopic traffic simulator,which can simulate the traveler’s response to it.And then the content of information is adjusted until the information tends to be stable.After several cycles the unbiasedness and consistency[30]strategy can be acquired. The theoretical framework is shown in Fig.5 based on predicted information.The traffic guidance strategy is proposed by the current network conditions.It is the dynamic induced information and can be sent to the virtual users on the network(travelers).The latter simulates the behavior of the traveler response for the information by the choice model.And then the new traffic guidance information can be proposed according to the different response of traveler.Continue to the cycle until the network has a consistent state,at this time the latest strategy can be sent to the real traveler.The continuous average algorithm is used to solve this kind of consistency problem. The consistency criterion is the path impedance(travel time)in the cycle.The updated algorithm of impedances is as follows:[31] where k is the number of the cycle;l is the path;h is the time interval;is the average travel time;is vehicle travel time in supply simulator;λkis weight,λk=1/(k+1)in continuous average algorithm.Given a very small number ε>0,if||−||<ε,the algorithm is over,otherwise return to the fi rst step until k is equal to the designed number K.The outputted fi nal strategy is consistent.skis defined as consistency measure;is induced information.The following equation can be founded. In above equation,the proposed guidance information is the best one when skis the minimum.It can be sent to the travelers in the real network. Fig.5 Traffic guidance based on predicted information. The weather forecast will not change the weather condition. But the traffic prediction information maybe change the future condition of traffic network.When the published induced information by various channels,some travelers will follow the induction but the others will not that make the road congestion occurs.So this information may be inaccurate which is called the overreaction.Fortunately,a feasible method is to obtain the consistent information from the mesoscopic simulator.The proposed strategy is sent to the simulator firstly,and then the behavior of travelers is simulated.The strategy will be adjusted by the simulator information.It is worth noting that the response behavior model of dynamic induced information is very important. Most of dynamic traffic guidance information are received by VMS,radio station,mobile phones,vehicle terminal and so on.Usually,there are three types guidance information:the descriptive information,the guidance information and no information.No information is very simple.It means no any information.The travelers select path according their own preferences.The guidance information recommend the path to traveler directly.The descriptive information is more complex.The kind of information is just describe the current network status and the travelers choose the most advantageous path by judging their own behavior.In this paper,the descriptive information are adopted for mathematical model. In this paper,the Logit path-size(PSL)model and the multinomial logit model(MNL)model are used to describe the behavior of traveler to dynamic information which proposed by Ben-Akiva.[32] The utility of overlapping paths are corrected by path size(PS)between starting and ending points.PS is derived from the discrete choice theory.The team is defined as follows: where Γiis link sets on path;lαis travel time of road α;Liis total travel time on path i;cnis the path selection set for the traveler n,δαjis a 0-1 variable,if the road α in the path j,then it is 1,otherwise it is 0.The travel time of the traffic flow is calculated by PS,in generally,it is static which descript the perception time for overlapping paths.If there is no overlap path,the PS=1,otherwise PS<1.So as long as the PS attributes are defined,the utility of traveler n select path i can be expressed as: The path selected probability Pn(i)is as follow: As shown in Fig.6,there are 3 paths between origin and destination in the traffic network.The path travel are all T.The overlap part travel time in path 1and path 2 is T-d.In MNL model,the probability of each selected path is 1/3,obviously it is right if and only if T=d which means there are not any overlap parts.Figure 7 describes the function relationship between the choice probability and the no overlapping part of path 1,2(d/T).When the ratio is close to 0,the path 1,2 becomes one physical path.At this time,the probability of a traveler select path 1,2 is 50%,and the probability of choice path 3 is also 50%.The PSL model can correctly reflect this kind of expectation.But the MNL model gives the probability of 33%,which is not sensitive to the overlap of the path. Fig.6 The problem of path overlap. Fig.7 The overlapping path selection probabilities. The simulation period can be divided into two phases:the update phase and the advance phase.In update phase,the traffic dynamics parameters(e.g.densities,speeds)are updated.In advance phase,the vehicles will be advanced to new position according to dynamic traffic flow model.Generally speaking,advance phase is far less than the update phase.There is relation as the followed equation. where∆tupdateis the updated time interval;tadvanceis the advanced time interval;T is simulation time;kUand kAare integers.A closed cycle scheme is used to solve the problem of simulation(see Fig.8). The detailed algorithm is as follows: (i)Initialize The traffic network is built including geometry characteristics and network topology.The time length is defined.All the vehicles are loaded on the current location on the network at time t=0.The update counter is 0,namely j=0. (ii)Simulation cycles At current time interval,the traffic flow parameters will be updated firstly and the counter plus 1:j=j+1;The parameters include dynamic OD flow,dynamic network status,lane group capacity,control strategy,incidents and work zone(location,duration,severity and so on). Fig.8 The mesoscopic traffic simulation. (iii)Information corresponding After an advanced time period,some of the vehicles would be changed the original path.The network states will be changed.This information is passed to the route choice model,and then goes to the steps(ii); (iv)Simulation termination criteria All the updated phases are performed,the algorithm is terminated when j=kU.The following information can be got by simulation:(i)The origin and destination of a car;(ii)The travel time of a car;(iii)The average speed,density and flow on a link;(iv)Queue length within a period of time. Daizong street of Tai’an city in Shandong province,China,there are 7 signal-controlled intersections.It is about 1.68 km long.In this study,the effect of dynamic information inducing strategy to relieve traffic congestion and improve traffic condition are studied.Therefore,the signal control is not considered and the intersection is taken the form of the no signal control.Network structure and related data are derived from the actual survey,as shown in Fig.9 and Table 1. Fig.9 Road network of Daizong street. In this paper,urban road network is studied,the free flow speed of road is defined as 60 km/h.ρjamis 0.1150,α is 1.9420,β is 0.5040,SIR length is 150 m.The simulation time is two hours,and it is divided into 8 time periods of 15 minutes.In each small time period,the vehicles are loaded according to the OD table,which calculated by traffic flow.In the first 15 minutes,the OD demand is loaded on the network and then the dynamic demand of the next 15 minutes until the simulation is completed. The algorithm will produce traffic information according to road condition and release to the traveler.The information published cycle is 300 seconds.The travelers choose the best travel mode path and start time according to the information based on behavior choice model.At the same time,the vehicles change the path to avoid the congested section according to the dynamic induced information. From the macro perspective,there are 38177 vehicles loaded on the network in the simulation time with dynamic information and without information.It means that the demand are all loaded on the network and the vehicles can move on link with some rules.The maximum number of vehicle on the network at the same time occurs in the seventh time periods.At this period,the number of vehicles on the network is 701 without dynamic information and 724 with it,which shows that some vehicle move quickly and more demand be loaded into the network.The total density in whole simulation time is 2.8755 without dynamic information and is 2.8942 with it.The average density is decreased slightly,which means the induced information can be partially balanced network traffic flow and can smooth congestion.The total velocity in whole simulation time is 3.0991e+003without dynamic information and is 3.1068e+003with it.It can be seen that the average speed is increased when the travelers received the dynamic information.This is due to that there is no more congested section,the average speed is calculated by speed-density model.The network average density is more smooth and the speed is more quickly. The results show that the average travel delay is reduced by 8.7%in whole simulation time period,as shown in Figs.10 and 11. Fig.1 0 The impedance of some sections before information induction. In order to show the effectiveness of the induced information,the average traffic flow,average density and average velocity with information and no information on each section are counted out.Figures 12–17 showed the network status with dynamic information and without information.The figures described the detailed the average flow,the average density and average speed of each segment in each time period. From the mentioned time and space figures,the average density has some smoothness in different degree,which means some vehicles changed the original path according to the induced information.Because of some sections have a great congestion,some travelers selected a relative smooth one. Fig.1 1 The impedance of some sections after information induction. Fig.1 2 Density on each link per interval without information. Fig.1 3 Flow on each link without information per interval. Fig.1 4 Speed on each link per interval with information. Fig.1 5 Density on each link with information per interval. Fig.1 6 Flow on each link per intervaln with information. When the dynamic induced information is published,the average speed has been significantly improved,the total traffic flow was relatively large,which show that the traffic region has become better.Another words,the dynamic induced information can be effectively to ease and control the traffic congestion. Fig.1 7 Speed on each link with information per interval. In this paper,the improved mesoscopic traffic flow simulation model is proposed.The traffic information is integrated into the behavior model of traveler,which reflect the response of the vehicle to the traffic information.The propagation process of vehicles in the network can be described more realistic than existing model.A dynamic traffic information generation algorithm is designed by using the idea of consistency.Furthermore,a case study is carried out on the Daizong street of Taian city by using the published dynamic traffic information.The research results show that the proposed method can improve the traffic environment,alleviate traffic congestion in a certain way in this paper.The generated information is dynamic and real-time traffic information.If it is able to predict the traffic situation and achieve a certain degree of accuracy,the forecast of traffic guidance information will play a more important role in the actual application,which is also the hot issue of traffic transportation in the future. [1]S.F.Ma,J.F.Bu,and A.X.Zhang,Syst.Eng.Electron.20(2005)30. [2]C.L.Lu,Journal of Transportation Systems Engineering and Information Technology 5(2005)58. [3]Z.L.Li and X.H.Zhao,Computer Engineering 34(2008)210. [4]X.F.Ma and X.P.Yan,Journal of Wuhan University of technology:Transportation Science and Engineering 32(2008)810. [5]Y.L.Gu,S.M.Li,and C.F.Shao,Journal of System Simulation 20(2008)2754. [6]Y.Wei,B.Q.Fan,Y.Han,and H.C.Gan,Journal of Traffic and Transportation Engineering 9(2009)114. [7]Y.H.Zhou,Controll and Decision 24(2009)1869. [8]K.Chatterjee,N.B.Hounsell,P.E.Firmin,and P.W.Bonsall,Transp.Res.Pt.C-Emerg.Technol.10(2002)149. [9]H.Y.Shang,H.J.Huang,and Z.Y.Gao,Journal of Beijing University of Aeronautics and Astronautics 34(2008)234. [10]H.Y.Shang,H.J.Huang,and Z.Y.Gao,Acta.Phys.Sin.56(2007)4342. [11]X.S.Lu,H.J.Huang,and H.Y.Shang,Journal of Beijing University of Aeronautics and Astronautics 38(2012)1352. [12]B.Chen,Y.B.Xie,W.Tong,et al.,Physica A 391(2012)2730. [13]B.Chen,D.Z.W.Wang,Y.Gao,et al.,Transportmetrica B-Transp.Dyn.6(2016)1. [14]B.Chen,C.Dong,Y.Liu,et al.,Comput.Phys.Commun.183(2012)2081. [15]Y.Jia,J.Wu,M.Ben-Akiva,et al.,IET Intell.Transp.Syst.11(2017)531. [16]C.L.Azevedo,S.Oh,K.Marczuk,and H.Soh,Conference of the Transportation Research Board 2622(2017)13. [17]D.F.Xie,Z.Y.Gao,and X.M.Zhao,Chin.Phys.B 17(2008)4440. [18]F.C.Pereira,F.Rodrigues,and M.Benakiva,J.Intell.Transport.Syst.27(2013)3. [19]L.Lu,Y.Xu,C.Antoniou,and M.Ben-Akiva,Transp.Res.Pt.C-Emerg.Technol.51(2015)149. [20]M.Ben-Akiva,S.Gao,L.Lu,and Y.Wen,Netw.Spat.Econ.15(2015)559. [21]B.Atasoy,T.Ikeda,X.Song,and M.E.Ben-Akiva,Transp.Res.Pt.C-Emerg.Technol.56(2015)373. [22]M.E.Ben-Akiva,T.Toledo,J.Santos,et al.,Case Studies on Transport Policy 4(2016)38. [23]M.Kamargianni,M.Ben-Akiva,and A.Polydoropoulou,Transportation 41(2014)1263. [24]M.Ben-Akiva and M.Abou-Zeid,Transportmetrica 9(2013)846. [25]M.D.Gangi,G.E.Cantarella,and R.D.Pace,Transp.Res.Pt.C-Emerg.66(2016)3. [26]Y.Xu,X.Song,Z.Weng,and G.Tan,Simul.Model.Pract.Theory 47(2014)182. [27]Y.Yuan,A.Duret,and H.V.Lint,Transportation Research Procedia 10(2015)82. [28]S.B.Li,G.M.Wang,T.Wang,and H.L.Ren,Discrete Dyn.Nat.Soc.2017(2017)5292616. [29]S.B.Li and D.N.Cao,Mod.Phys.Lett.B 31(2017)1750219. [30]M.Ben-Akiva,M.Bierlaire,D.Burton,et al.,Netw.Spat.Econ.1(2001)293. [31]J.Bottom,Consistent Anticipatory Route Guidance,Cambridge,USA:MIT(2000). [32]N.B.Hounsell,P.E.Firmin,and P.W.Bonsall,Transp.Res.Pt.C-Emerg.Technol.10(2002)129.2.3 The Anisotropic Mesoscopic Simulation Model





2.4 The Vehicle Movement Model




3 The Predicted Information Induction Strategy
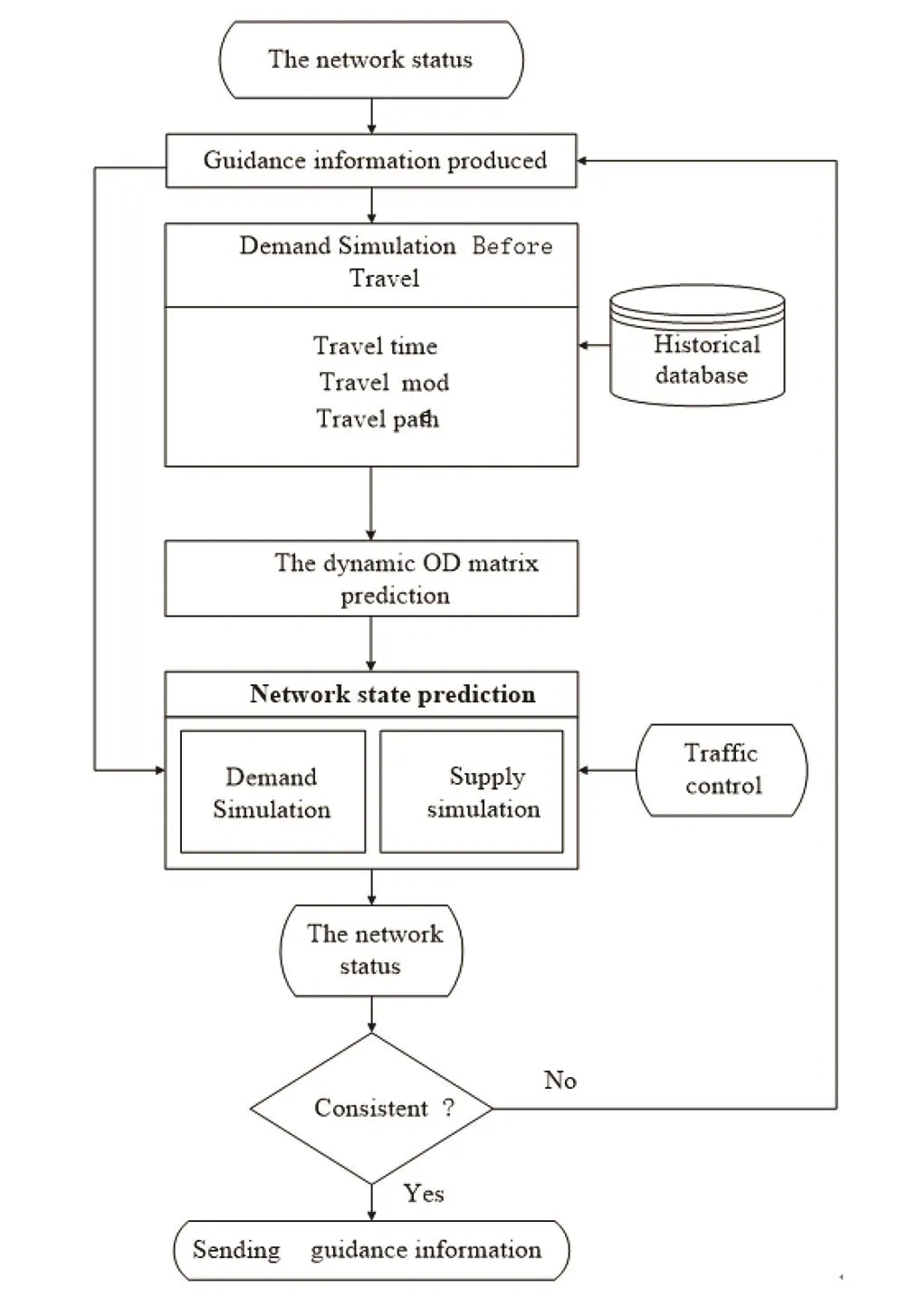
3.1 The Traffic Guidance Theory Based on Predicted Information


3.2 The Corresponding of Travelers for Dynamic Traffic Information
3.3 The Traveler Behavior Model on Road



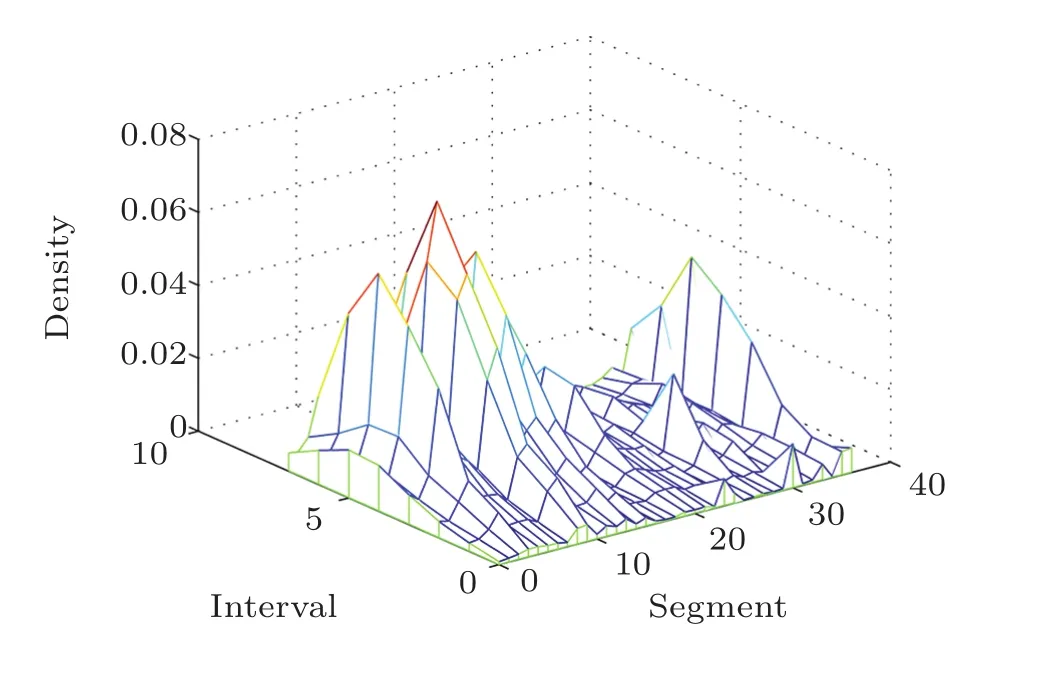
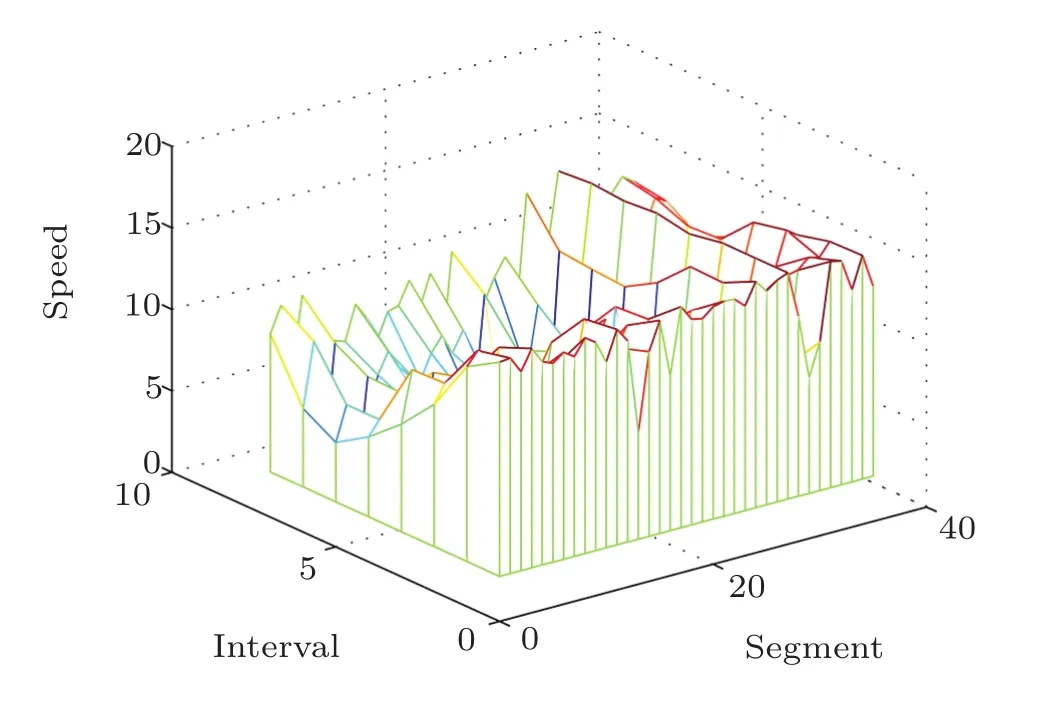
4 The Mesoscopic Traffic Simulation
5 Case Study



6 Conclusion
猜你喜欢
——王涛
杂志排行

Communications in Theoretical Physics的其它文章
- Searches for Dark Matter via Mono-W Production in Inert Doublet Model at the LHC∗
- Electrical Properties of an m×n Hammock Network∗
- On the Generalized Heisenberg Supermagnetic Model∗
- Particle Size Influence on the effective Permeability of Composite Materials∗
- New Double-Periodic Soliton Solutions for the(2+1)-Dimensional Breaking Soliton Equation∗
- Modeling Chemically Reactive Flow of Sutterby Nano fluid by a Rotating Disk in Presence of Heat Generation/Absorption