高地隙自走式喷雾机电控液压转向系统设计
2018-06-06林立恒侯加林吴彦强李天华刘向峰郭凤江
林立恒,侯加林,吴彦强,李天华,刘向峰,郭凤江
(1.山东农业大学 机械与电子工程学院,山东 泰安 271018;2.山东省园艺机械与装备重点实验室,山东 泰安 271018;3.山东华盛农业药械有限责任公司,山东 临沂 276017)
0 引言
高地隙自走式喷雾机作为大型喷雾机的典型代表,在作物病虫草害化学防治过程中发挥着重要的作用。因其具有作业效率高、施药均匀性好、驾驶操作方便灵活、劳动强度低等特点,现已成为一种重要的植保机械。尤其在解决高秆类作物中后期施药难、病虫害防治效果差、农药利用率低等问题时发挥着越来越重要的作用[1]。此外,现代微电子技术、仪器与控制技术、信息技术等许多高新技术在高地隙自走式喷雾机上的成功应用,更是推动高地隙自走式喷雾机朝着智能化、光电一体化方向快速发展[2]。
实际生产中,由于作业环境的多样性和复杂性,如何确保高地隙自走式喷雾机在喷雾作业过程中始终保持较高的作业效率和灵敏的转向操作,是高地隙自走式喷雾机设计和研发的重要内容[3]。本文通过综合分析现有高地隙自走式喷雾机转向行走和调速模式[4-6],设计了一套高地隙自走式喷雾机电控液压转向系统(Electric Hydraulic Power Steering , EHPS )。该系统主要包括主控制器PLC、接近开关、逆变器、电磁换向阀、液压泵、液压锁、转向液压缸及溢流阀等组件。通过主控制器控制电磁换向阀以不同的方式接通液压缸,使车辆在不同行走模式、不同转向模式之间进行灵活的切换。该系统同时赋予了高地隙自走式喷雾机3种转向模式,即两轮模式、四轮模式和斜行模式,如图1所示。
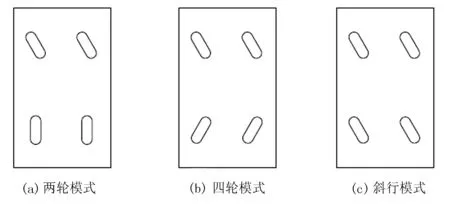
图1 车辆转向模式
此外,在工作和运输过程中,高地隙自走式喷雾机可以根据实际情况和需要选择不同的速度模式,极大提高了车辆对不同工况的适应能力和工作效率。
1 液压系统设计
鉴于大型自走式喷雾机普遍具有载重量大和行驶惯性大等特点,本文在进行自走式喷雾机转向系统设计时采用了全液压动力转向技术。实践表明:液压动力转向技术可以有效提高车辆的转向灵敏度,减缓道路冲击对车辆产生的影响,提高驾驶安全性,降低驾驶员疲劳程度[7]。截至目前,液压动力转向技术在国外植保机械尤其是大型自走式喷雾机设计上应用已较为普遍,技术较为成熟,但液压动力转向技术在国内的应用仍然处于相对落后的状态,需要更深入的研究和试验[8-9]。本文所设计的电控液压转向系统液压部分主要由液压泵、全液压转向器、电磁阀、溢流阀、液压锁、油箱和转向液压缸组成,原理图如图2所示。其中,液压泵为液压转向系统提供动力,其自身动力来源于自走式喷雾机的柴油发动机;电磁阀通过不同的通断电组合来改变转向系统到达液压缸的油路,实现车辆不同转向模式和不同行驶速度模式的切换;全液压转向器在液压助力下控制车辆的左右转向和直线行驶。此外,为保证系统油路压力稳定,还安装有安全溢流阀和液压锁等液压保护装置。图2中,电磁阀Y1-Y8不同的通电状态分别对应不同的转向模式和动作:Y1为斜行模式,Y2为四轮模式,Y3和Y4为喷雾机后轮自动回正,Y5、Y6、Y7和Y8为喷雾机车轮位置校正调节。
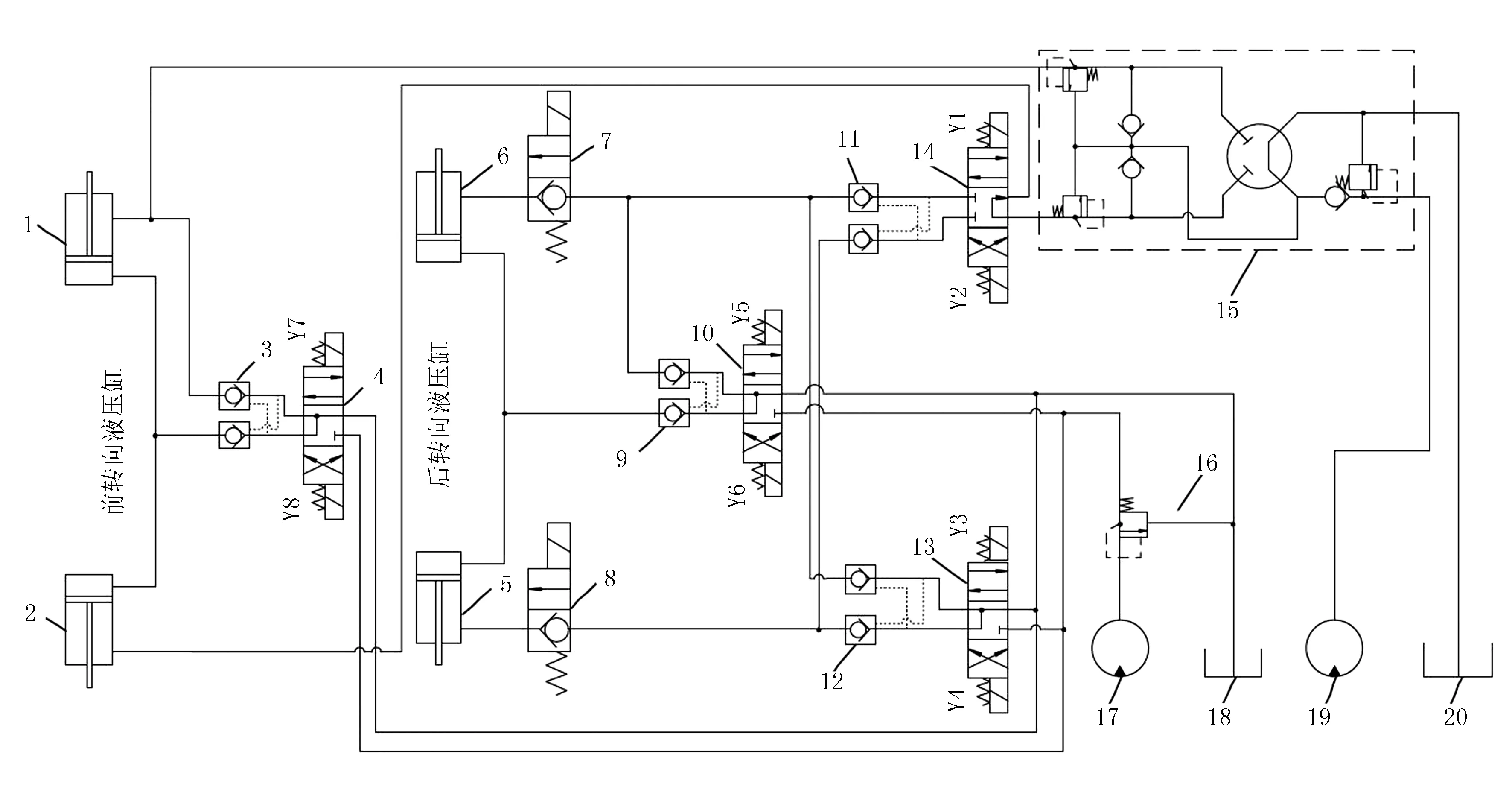
1、2、5、6.液压缸 3、9、11、12.液压锁 4、10、14.三位四通电磁阀 7、8.两位两通电磁阀 15.液控转向器 16.溢流阀 17、19.液压泵 18、20.油箱
2 电气控制系统设计
电控液压转向系统以电气控制液压部件实现喷雾机转向模式切换及速度模式的选择。电气控制系统的设计是整个电液转向系统可靠运行的关键。本文设计的电控液压转向系统中,电气控制系统主要包括硬件部分和软件部分。
2.1 控制系统硬件部分
电气控制系统硬件部分主要包括系统主控制器PLC、电压转换的逆变器、检测车轮位置的接近开关、操作控制按钮及车载24V直流电源。
2.1.1 主控制器PLC
PLC是可编程控制器(Programmable Logic Controller)的简称,是为工业环境应用设计制造的计算机,主要用于替代传统的继电器实现逻辑控制,广泛应用于机电控制、电气控制和数据采集等多个领域[10-11]。本文选用三菱公司生产的FX1N-60MR-001型PLC作为电气控制系统的主控制器,其CPU内置8 000步无需电池支持的EEPROM、输入输出刷新指令、输入滤波调整指令、输入中断功能和脉冲捕捉功能。该型号PLC使用100~240V交流供电、36点输入、24点继电器输出、200点16位增计数器、可扩展输入输出点数128点。
2.1.2 接近开关
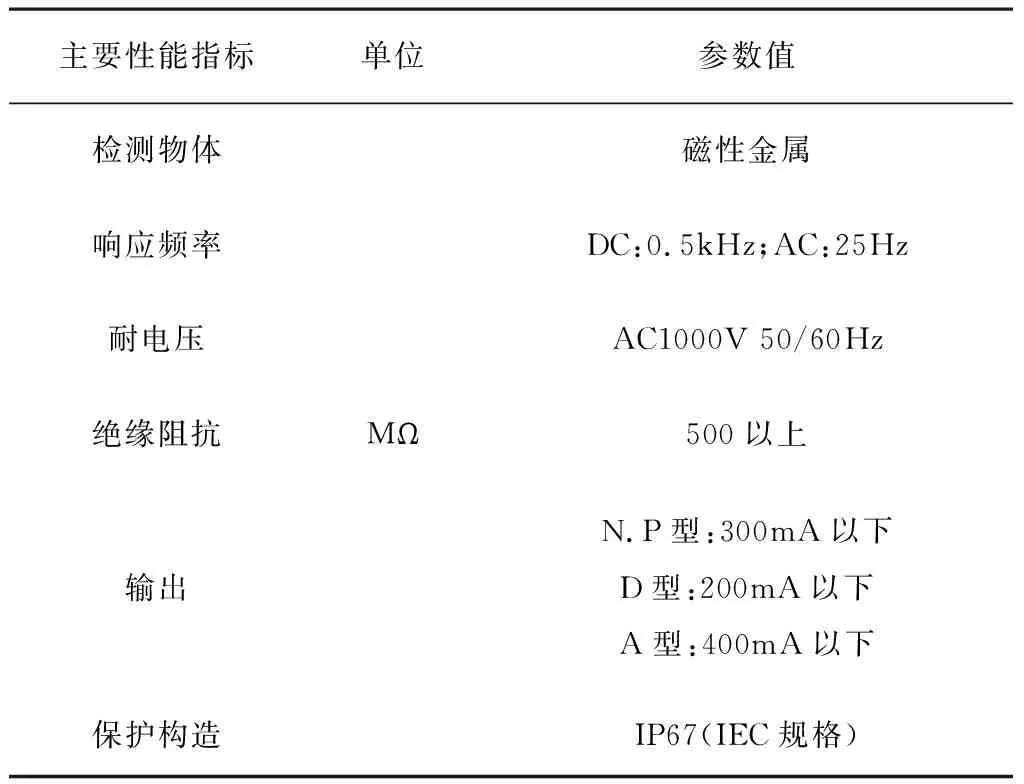
接近开关(Proximity Switch)是一种无需与运动部件直接接触就可以动作的开关型传感器,既有行程开关、微动开关的特性,同时具有传感器性能,动作可靠,性能稳定,频率响应快,使用寿命长,抗干扰能力强,且防水、防震、耐腐蚀。接近开关的原理是:当被检测物体表面与接近开关的距离小于接近开关的检出距离时,接近开关输出电信号到控制器。本文选用型号为LJ18A3-8-Z/BX三线制NPN型接近开关来检测喷雾机前后轮的位置状态,性能参数如表1所示,内部原理如图3所示。
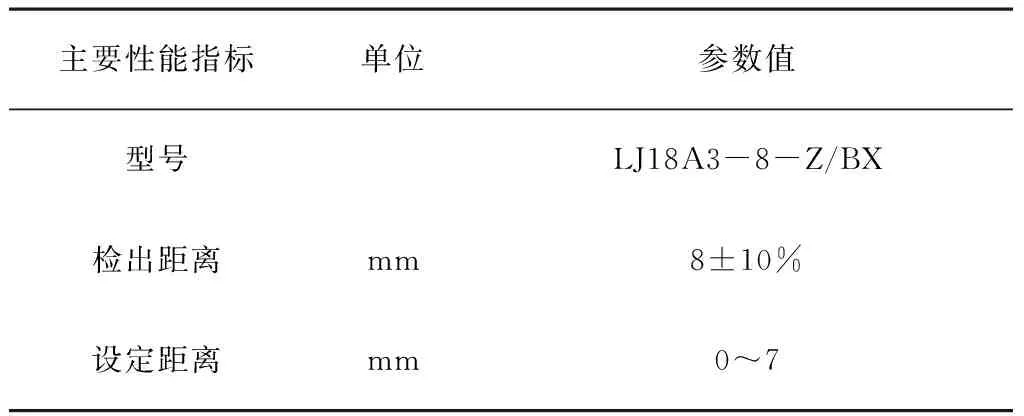
表1 LJ18A3-8-Z/BX型接近开关参数表
续表1
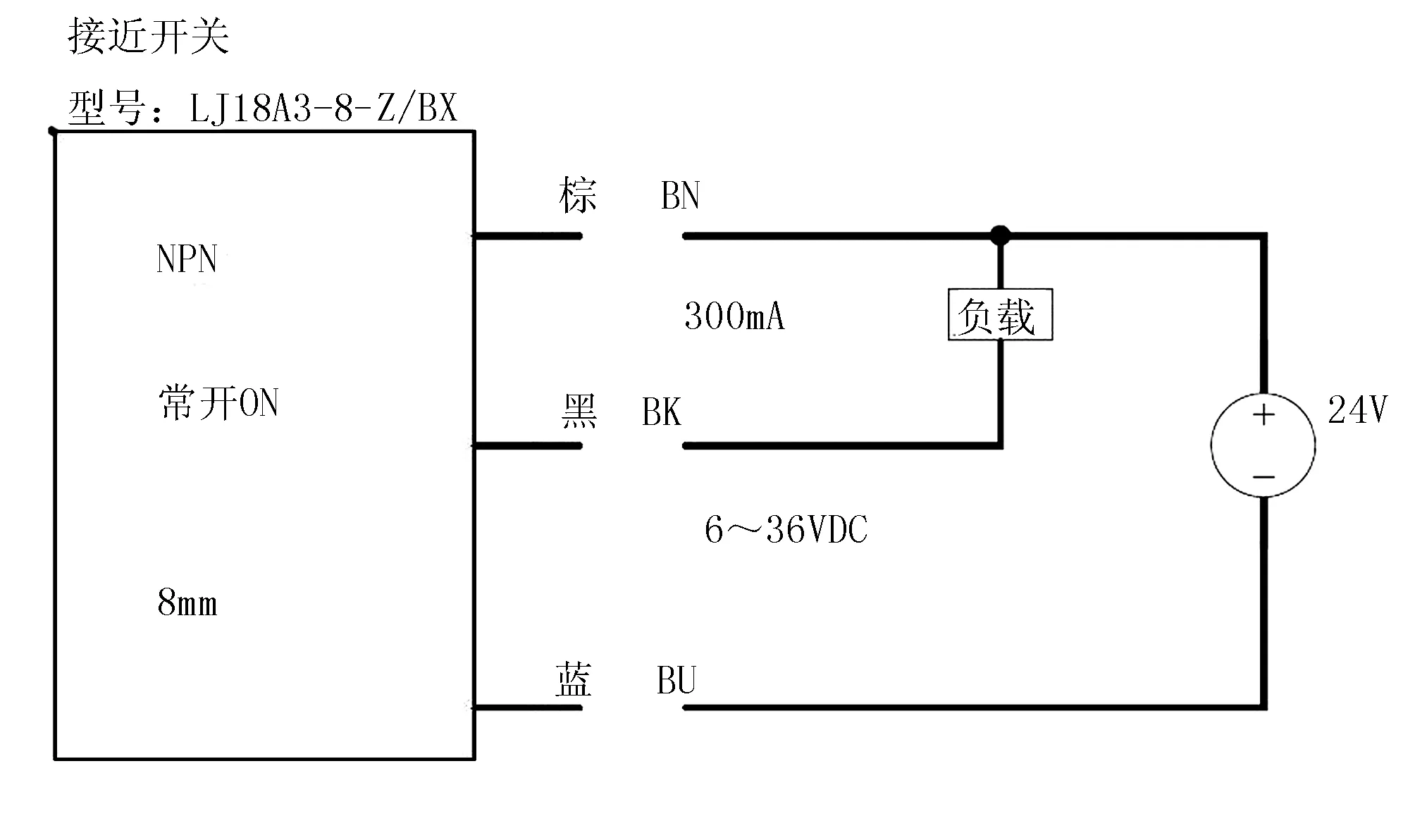
图3 接近开关电路原理图
2.1.3 其他硬件设备
本系统硬件设备所需电源均由车载24V直流电源提供。为给主控制器PLC提供合适的工作电压,选配500W“DC 24V TO AC 220V”型车载逆变器,接线图如图4所示。
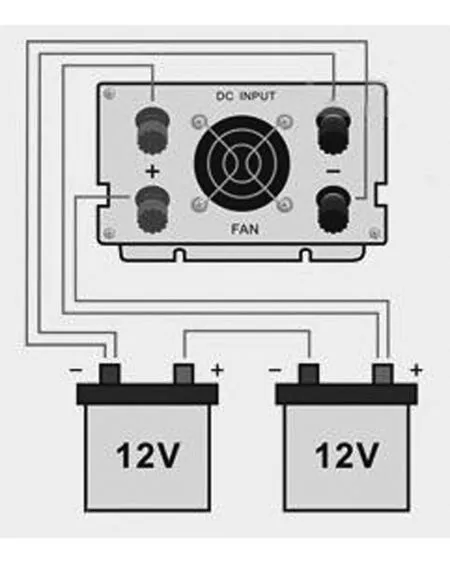
图4 500W逆变器接线图
2.2 控制系统软件部分
控制系统的软件部分设计旨在实现喷雾机不同转向模式及不同速度模式的灵活转换。本系统所编写的喷雾机电液转向系统程序能很好地满足喷雾机两轮转向、四轮转向及斜行3种转向模式,保证喷雾机在不同的工况下能以最可靠、灵活的方式工作,轻松躲避行驶路线上的障碍物;主控制器通过控制不同电磁阀动作改变喷雾机行走马达的排量设定了3种速度模式,使车辆工作和运输更加方便。系统工作时,主控制器PLC进入自检模式,检测控制系统是否故障:若无故障,则进入主程序执行阶段;否则,发出系统故障报警。进入主程序后,喷雾机四轮转向行驶模式置位,后轮自动回正,喷雾机开始四轮转向模式行驶。当按下两轮或斜行模式切换按钮后,控制器首先检测后轮状态,若后轮不在中位,主控制器输出控制信号到电磁阀接通液压缸使后轮自动回正,然后转动方向盘待前轮回正后完成车辆转向模式的切换。转向程序执行流程图如图5所示。
3 试验验证
电控液压转向系统设计完成后,安装在3WP-2600G高地隙自走式喷杆喷雾机上进行性能测试及可靠性试验,如图6所示。
3WP-2600G高地隙自走式喷杆喷雾机是一款大型、大幅宽、大容量的高地隙喷杆喷雾施药机械,整机采用了全液压技术,其部分参数如表2所示。
具体实现和安装方法是:在喷雾机左侧前后轮转向油缸每处分别安装两个LJ18A3-8-Z/BX型接近开关,用来检测前后轮位置状态,安装位置如图7所示。为了便于进行转向和行驶模式的切换,在驾驶室内设有转向模式切换及速度模式选择按钮,控制按钮布置情况如图8所示。
现场试验表明:本文所设计的电控液压转向系统能够保证高地隙喷雾机在行驶和工作过程中根据实际情况的变化可靠地进行转向模式的切换;当喷雾机执行转弯或掉头操作时,若采用四轮转向模式转弯,内侧轮最小转弯半径为3 930mm,外侧轮最小转弯半径为6 160mm;若采用两轮模式转弯,转向内侧轮最小转弯半径7 930mm,外侧轮最小转弯半径10 160mm;若采用斜行模式行驶时,车辆能灵活地躲避行驶路线上的障碍物,并能完成移库操作。此外,喷雾机可以根据工作及运输等不同的场合在3种速度模式之间实现轻松切换,最高行驶速度可以达到30km/h。经试验测试,整个电控液压转向系统具有较高可靠性和反应灵敏度。
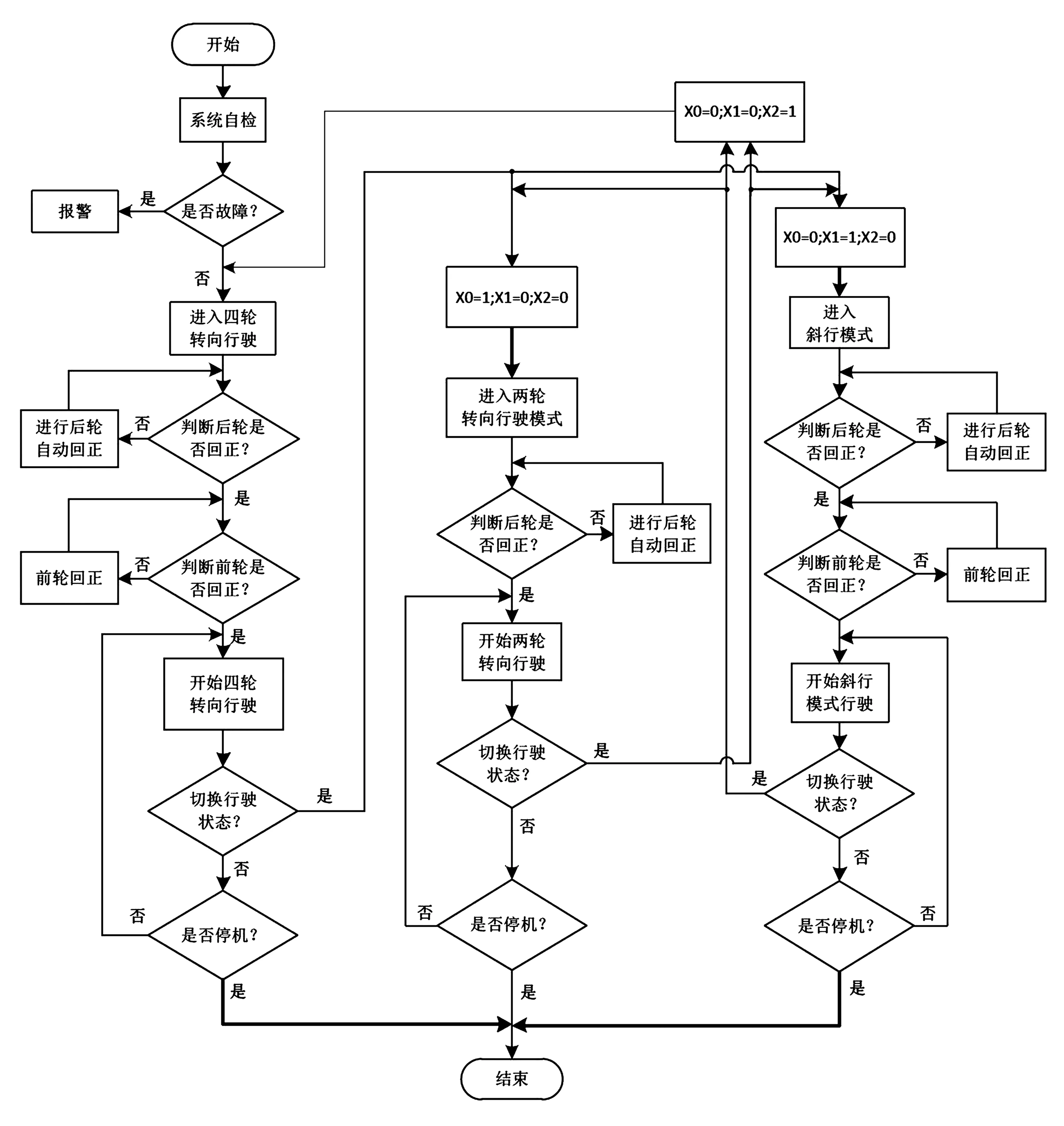
图5 转向系统流程图

图6 3WP-2600G高地隙喷杆喷雾机
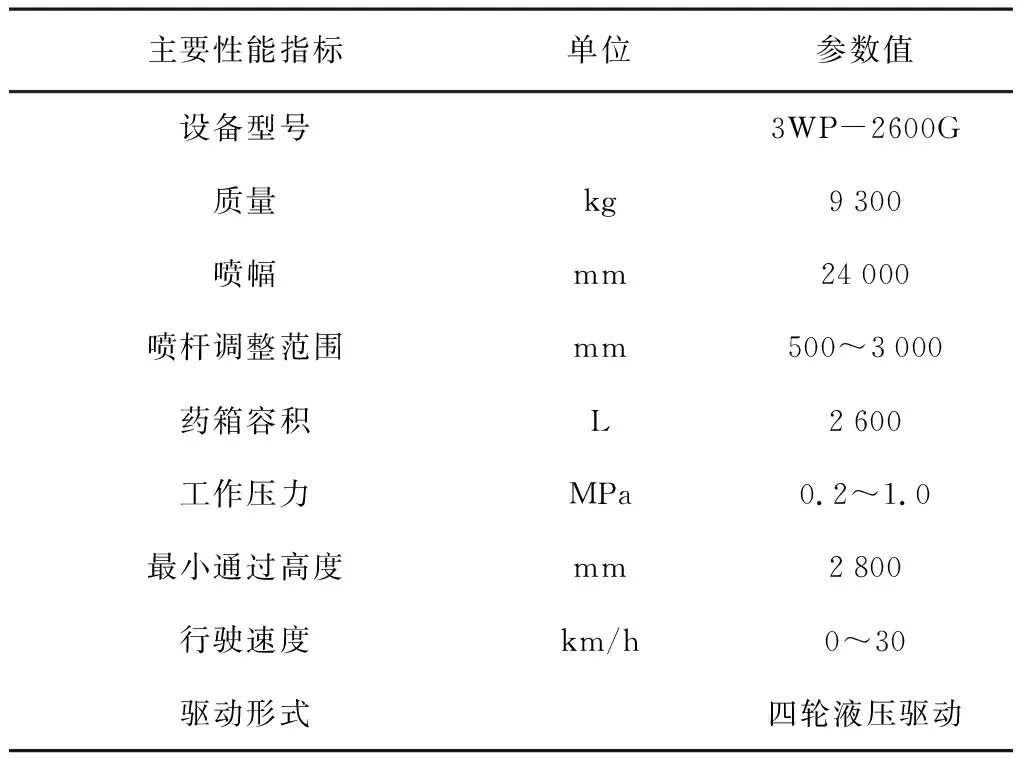
主要性能指标单位参数值设备型号3WP-2600G质量kg9300喷幅mm24000喷杆调整范围mm500~3000药箱容积L2600工作压力MPa0.2~1.0最小通过高度mm2800行驶速度km/h0~30驱动形式四轮液压驱动
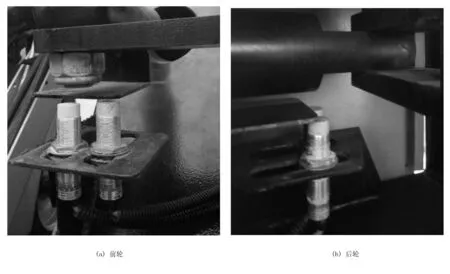
图7 接近开关安装位置示意图
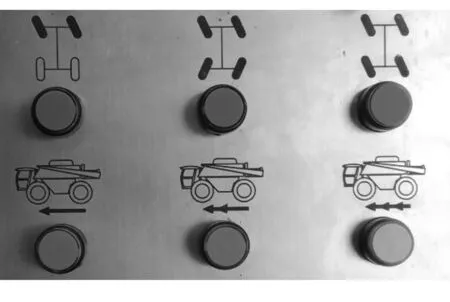
图8 控制按钮
4 结论
高地隙自走式喷雾机电控液压助力转向技术的成功应用,能够有效改善高和提高地隙自走式喷雾机工作性能和操作灵敏性。鉴于高地隙自走式喷雾机的自身特点,采用液压助力转向技术能有效缓解驾驶员的疲劳程度,减轻驾驶员体力消耗。本文设计的电控液压助力转向系统通过综合分析现有大型自走式喷雾机转向模式,经过认真设计,在3WP-2600G高地隙自走式喷杆喷雾机上取得成功应用,验证了系统具有良好的工作性能和较高的可靠性,使喷雾机操作更加简便、灵活,同时极大提高了高地隙自走式喷雾机的工作效率,对大型高地隙自走式喷雾机转向系统的设计具有一定的参考价值。
参考文献:
[1] 刘丰乐,张晓辉,马伟伟,等.国外大型植保机械及施药技术发展现状[J].农机化研究,2010,32(3):246-248.
[2] 窦玲静,方宪法,杨学军,等.自走式喷雾机转向技术应用与动态分析[J].农机化研究,2013, 35(3):1-6.
[3] Jan J. Langenakens, Luc Clijmans, Herman Ramon, et al. The effects of vertical sprayer boom movements on the uniformity of spray distribution[J].Journal of Agricultural Engineering Research,1999,74(3): 281-291.
[4] Wang J, Wang Q, Jin L, et al. Independent wheel torque control of 4WD electric for differential drive assisted steering[J].Mechatronics,2011,21(1):63-67.
[5] 郑凯峰,冯占宗,陈宇,等.电液控制全轮转向系统[J].液压与气动,2016(8):89-94.
[6] 贾卫东,张磊江,燕明德,等.喷杆喷雾机研究现状及发展趋势[J].中国农机化,2013,34(4):19-22.
[7] 袁守利,陈昌,董柯.3WPZ-500自走式喷杆喷雾机液压系统设计[J].武汉理工大学学报:信息与管理工程版,2015,37(6):855-859.
[8] 童钦,孟广耀,黄居鑫,等.自走式喷药机四轮转向控制系统研究[J].制造业自动化,2014, 36(9): 144-146.
[9] 陈文良,谢斌,宋正河,等.拖拉机电控液压转向系统的研究[J].农业工程学报,2006,22 (10): 122-125.
[10] 霍莹. 基于PLC的工厂自动化生产物流控制系统研究[D]. 西安:长安大学,2010.
[11] 罗昔柳,边洪瑞,秦迎梅,等.基于三菱PLC的智能家居服务系统设计[J].控制工程,2009,16(S4):44-48.
