低转矩波动无刷直流电动机提前导通控制方法
2018-06-04胡明桦郭鸿浩
杨 艳,胡明桦,郭鸿浩
(南京邮电大学,南京 210023)
低转矩波动无刷直流电动机提前导通控制方法
杨 艳,胡明桦,郭鸿浩
(南京邮电大学,南京 210023)
摘 要:转矩波动限制了无刷直流电动机在高精度高稳定性系统中的应用,随着转速增加,电机存在转矩波动增大、输出转矩下降等问题。根据等效模型分析了提前换相过程中转矩波动情况,研究了一种提前导通PWM控制方法。该控制方式使换相时电流的交点提前至反电动势的交点处,提前角度可随电机运行状态变化而动态调整。给出了控制方法实施过程并建立MATLAB/Simulink仿真模型,验证了控制方法对抑制转矩波动和减小输出转矩效果较明显。
关键词:无刷直流电动机;转矩下降;提前换相;低转矩波动;动态调整
0 引 言
近年来无刷直流电动机因功率因数高、运行可靠且易维护、长寿命等优点得到了广泛的应用,一系列相应的控制策略也日臻完善。虽然无刷直流电动机性能优势明显,但在高精度的伺服控制系统中应用较少。限制无刷直流电动机在上述系统中应用的关键原因是无刷直流电动机有较明显的转矩波动,抑制转矩波动一直是无刷直流电动机研究热点之一[1-5]。一方面通过电机本体设计从多个方面优化来抑制转矩波动;另一方面通过控制策略对无刷直流电动机转矩波动进行补偿来抑制转矩波动,取得了一系列成果。文献[4]采用三相控制策略,将每个PWM周期分成3个区域,每个区域的大小分别决定着电流上升和下降的速率以及换相的快慢,在换相过程中为三相分配合适的占空比就使得关断相电流的下降速率和导通相电流的上升速率在每个PWM周期内相等,达到消除转矩波动的目的。该方法在低速时抑制转矩波动明显,但在重载或高速的情况下电机换相时间短,而该控制策略每个换相周期需要经过多个PWM调制周期才能消除转矩波动,因此会存在电机换相失败的问题。文献[8]对文献[4]中的控制策略进行研究,改进了换相过程中三相占空比计算方法,限制换相过程中关断相的占空比,解决了高速重载下存在的换相失败问题。
提前导通控制是为了使电流和反电动势同步,换相时将尚未开通或关闭的开关器件提前一个时间开通,避免电流严重滞后于反电动势。无刷直流电动机同一相电流上升和下降的波形基本对称,根据相关性定理,当且仅当电流波形的中点与反电动势波形的中点重合时相电流与反电动势的乘积最大[2],在这种情况下电机的输出转矩最大,为了实现这一条件,必须对电流进行提前导通。文献[1]给出了最佳超前角计算公式,实时计算超前角可满足特殊的工作场合。文献[3]给出了一种通过定子磁链实施提前换相的方法,该方法不需主动计算提前换相角,并且换相角可随相电流大小自动调节,对电机的平均推力提升十分明显。
本文对于上述2种抑制转矩波动控制方法进行了深入分析,研究了一种结合上述2种控制方式的低转矩波动无刷直流电动机提前导通PWM控制方法。通过MATLAB/Simulink建立了无刷直流电动机仿真模型并进行验证。
1 提前导通PWM控制原理
1.1 电机模型
三相星型连接无刷直流电动机工作在6状态方式下的等效模型原理图如图1所示。为方便分析,做以下假设:三相绕组对称;忽略齿槽效应和电枢反应;不计磁路饱和、涡流和磁滞损耗[7]。
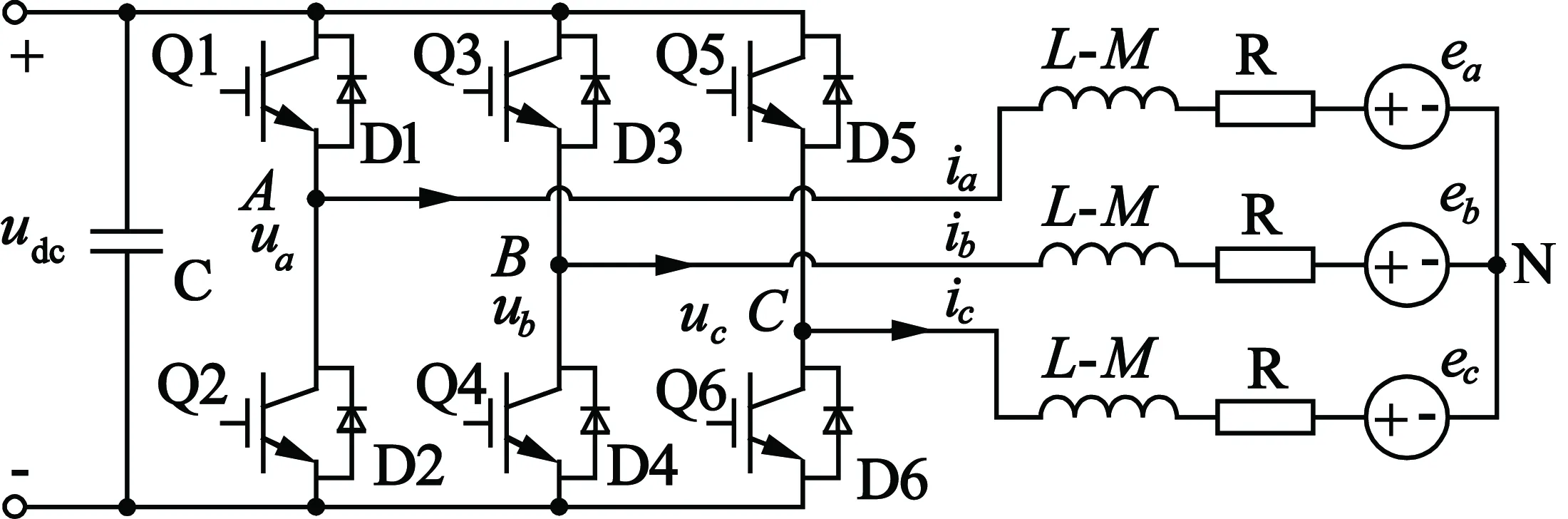
图1 无刷直流电动机等效原理图
根据无刷直流电动机的特性,建立无刷直流电动机的数学模型矩阵方程:
(1)
式中:ux,ix,ex(其中x=a,b,c)分别是三相的绕组端电压、电流瞬时值和反电动势;R为绕组电阻;附加假设电枢等效电感不受气隙合成磁通变化影响,L为相绕组电感,M为相绕组的互感,L和M均为常数。用L替代L-M,则等效电路改写:
(2)
ia+ib+ic=0
(3)
设转子角速度为ω,极对数为p,电磁转矩Te:
Teω=p(iaea+ibeb+icec)
(4)
1.2 无刷直流电动机换相过程分析
传统无刷直流电动机导通时,反电动势和电流波形如图2所示。无刷直流电动机绕组电感的存在使得电流上升和下降的速率不可能无限大,换相时间不能为零,电流波形总是滞后于反电动势波形,从而产生换相转矩波动。
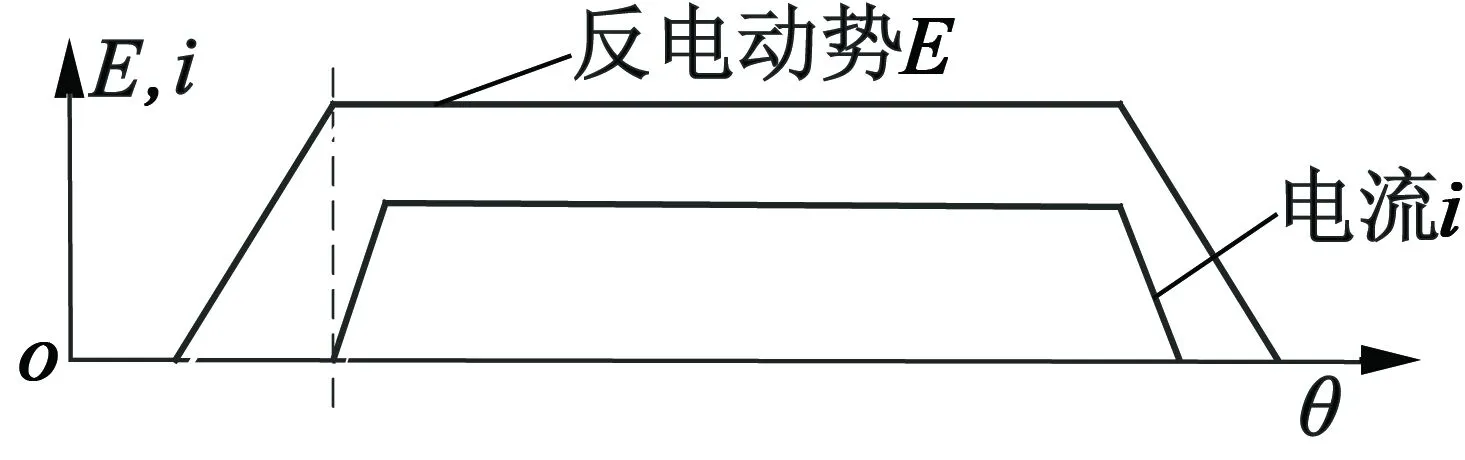
(a) 低速运行时
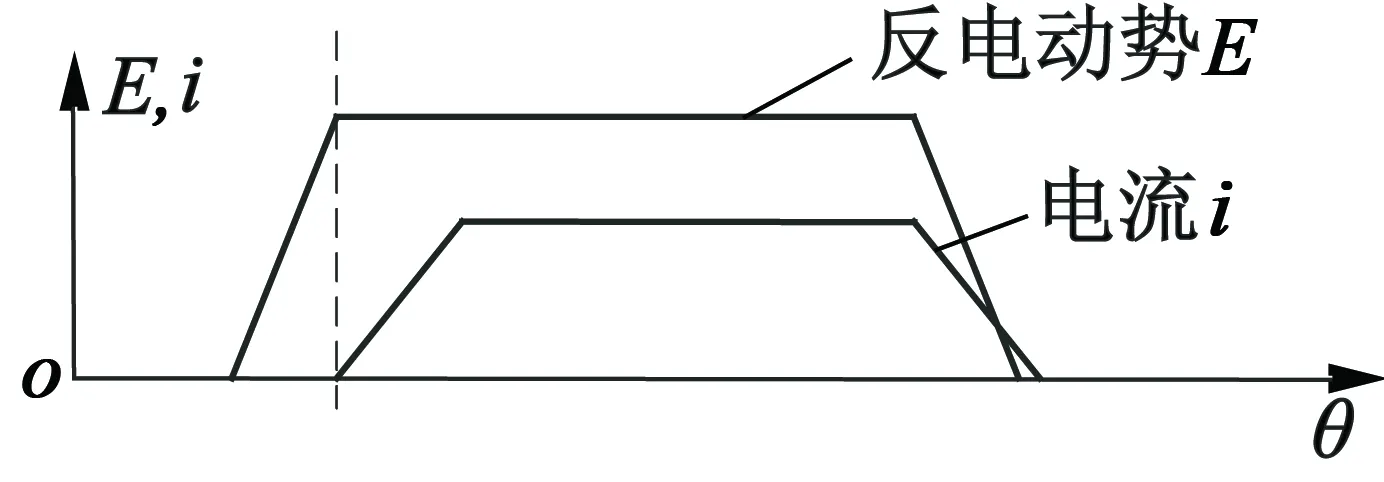
(b) 高速运行时
图2(a)显示了电机工作于低速时反电动势和电流波形,反电动势和绕组电感相对比较小,电流快速从零上升到稳态值且快速从稳态值下降到零,转矩波动较小。图2(b)显示了电机工作于高速时的反电动势和电流波形,反电动势和绕组电感相对比较大,电流从零上升到稳态值有相当一部分空间角度间隔,电流从稳态值下降到零的空间角度间隔也变长,会出现反电动势已经为零而电流还没达到零的情况,这种现象会减小电磁转矩并且增大转矩脉动及电流纹波。
无刷直流电动机导通过程分为两相导通状态和三相导通状态,又称为导通区间和换相区间。换相转矩波动是转矩波动的主要来源,文献[6]分析了理想状态下电机的换相过程,即使电机开通相和关断相电流斜率相同时也存在转矩波动。
(5)
式中:Ti为电磁转矩;Ttc为波动转矩。
换相过程中非换相相电流保持恒定,电磁转矩为常值,没有波动。Ttc是关于θ的二次函数,对θ求一次导,得到关于θ的一次函数,并令等于0。即:
(6)

图3 换相过程转矩波动图
无刷直流电动机提前导通控制转矩波动将发生变化,换相时三相反电动势和电流波形如图4所示。
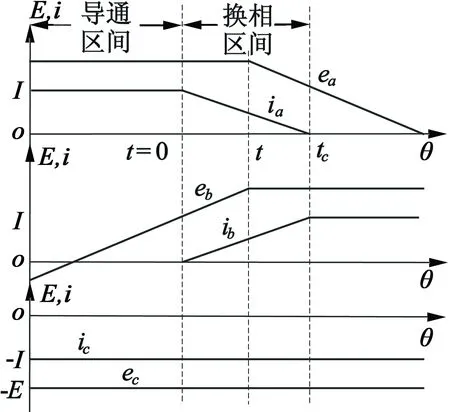
图4 提前换相反电动势和电流波形图
图4中,换相区间反电动势的变化需要分段表示,根据以上分析引入提前导通控制,提前量为t。
以AC到BC换相为例,换相过程中开通相和关断相提前t导通,A相和B相反电动势分为两段表示。反电动势和电流的表示如下:
(7)
(8)
ec=-E
(9)
(10)
(11)
ic=-I
(12)
假设电机在运行过程中转速恒定,ia,ib,ic为a,b,c相电流,ea,eb,ec为a,b,c相反电动势,E为反电动势平顶部分幅值,I为稳态电流幅值,ωe为电磁转速,把式(7)~式(12)代入式(4)得到电机转矩表达式:
(13)
式中:ωm为机械角速度。式(13)经过化解后,得到转矩波动关于提前导通时间t和电机转子位置角θ的二元二次方程:
(14)
(15)
(16)
换相时的转矩大幅减小,最优提前导通角时两个最大值相等,当提前换相非最优时两个最大值不一定相等。换相过程如图5所示。
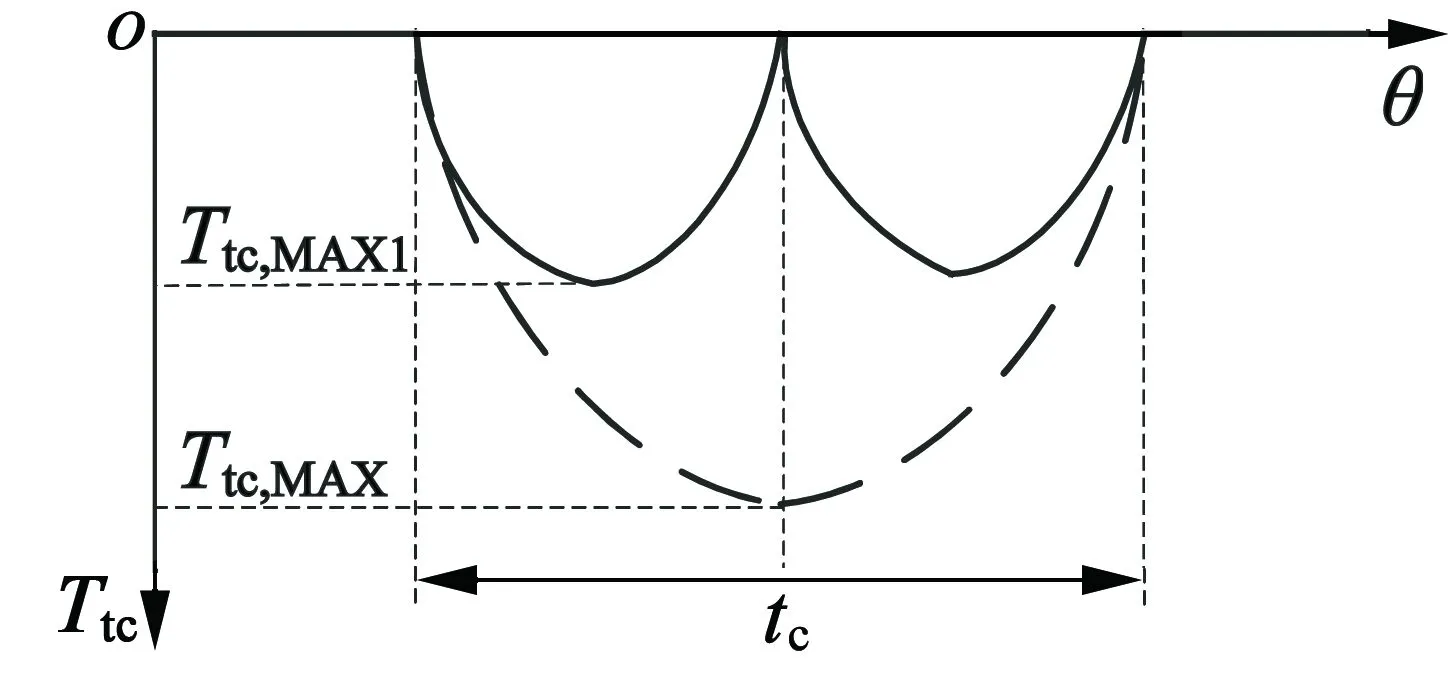
图5 提前导通换相转矩波动图
在换相区间转矩波动幅度减小,换相转矩波动得到抑制,高速时转矩下降的问题也得到缓解。
1.3 提前导通控制方法
无刷直流电动机提前导通控制,克服了高速时转矩下降问题,抑制了转矩波动,是无刷直流电动机研究的一个热点。提前导通角的计算是提前导通的关键所在,之前的研究将电机常工作于匀速状态,根据经验设置一个固定的提前导通角就能满足运行需求。但现实应用中电机运行状态变化频繁,固定的提前导通角方法早已不能满足性能需求。文献[9]研究了基于速度改变提前角度控制的方法,提出合理的提前角度能小幅提升输出功率,而提前角过大则会适得其反。提前控制方法很多,有各自的优缺点。
本文研究了一种提前导通控制方法。换相时分别检测开通、关断两相反电动势和电流的幅值,理想情况下两相反电动势幅值交点即换相开通时刻,两相电流幅值交点时刻即换相时间的一半,在空间角度上两个交点之差就是最优提前导通角。本文研究换相控制模块实时检测获取换相提前角度应用到下一个换相周期来实现电机提前换相,具体过程如下。
三相星型6状态工作方式无刷直流电动机一个旋转周期反电动势和电流波形如图6所示,为了便于分析,假设反电动势波形为理想梯形波。
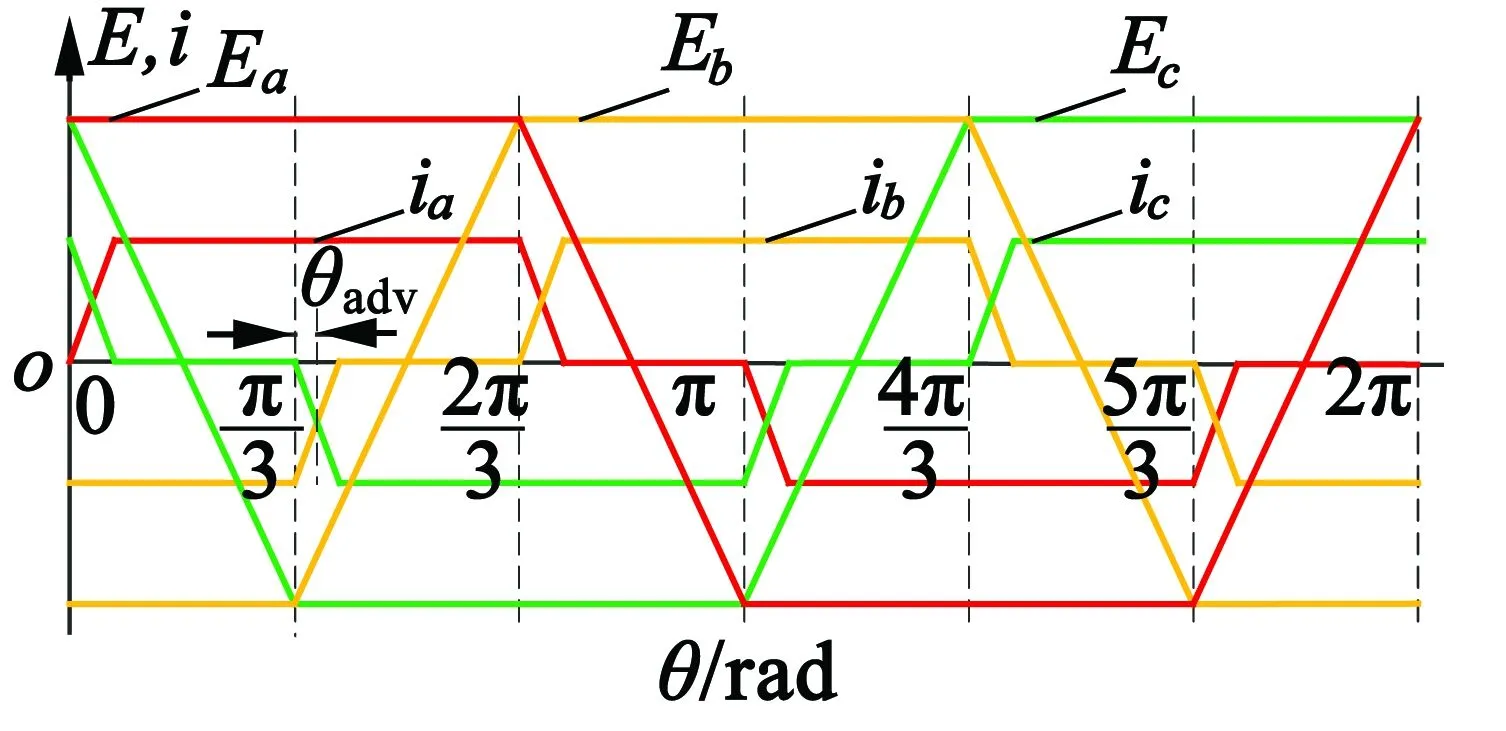
图6 未提前导通三相反电动势和电流波形
本文研究的无刷直流电动机提前导通角在电机运行过程中检测得到,不需通过计算换相时间,省去了复杂的计算过程。提前导通角取反电动势交点到当前换相电流交点的角度差值,传统无刷直流电动机控制方法电流总是滞后于反电动势,所以检测到的提前导通角大于零。
提前换相角的计算是提前导通的关键,电机运行状态变化时换相提前角度也在不断的变化,当电机平稳运行后换相提前角度趋于常值。换相控制的具体原理结合图7和图8分步骤进行说明。
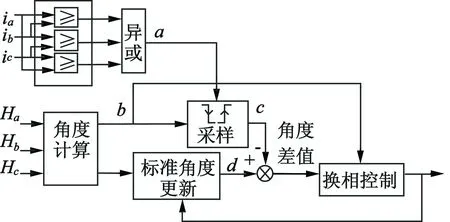
图7 换相控制原理图
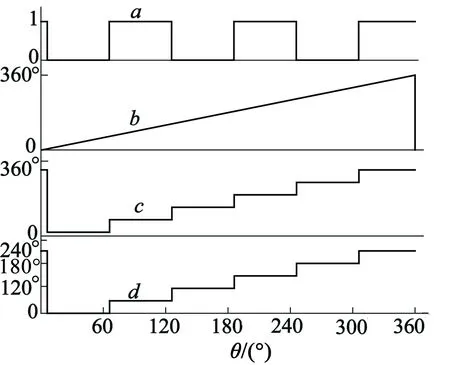
图8 未提前波形时序图
步骤1:如图7所示,电流检测接收三相电流输入,对当前开通相和关断相电流幅值进行比较。当两相电流相等时输出一个触发信号,三相6状态电机在一个旋转周期360°内会有6个触发信号,将6个信号异或成一个触发信号a。触发信号a控制电机换相时刻,同时也是采样模块的触发信号。
步骤2:角度计算根据霍尔传感器获得三相位置信号,按照导通时电机处于0位置,旋转一周360°回到原位置,形成一个从0~360°循环变化的角度信号,即信号b。
步骤3:根据触发信号a对循环变化的角度信号b进行采样,在一个旋转周期内形成6个不同角度幅值的阶梯信号c。信号c的6个幅值表示旋转周期内6个电流交点的角度值。
步骤4:标准角度信号生成模块根据霍尔信号生成换相标准角度信号d,标准的角度为0°(360°)、60°、120°、180°、240°和300°,即换相时刻反电动势交点的角度值。
步骤5:信号d与信号c分别对应于当前换相周期标准换相角度和实际换相角度,通过计算得到当前周期换相提前角度,在下一换相周期时以该角度对电机进行提前导通。
控制系统在第一个换相周期不进行提前导通,在第二个周期内使用第一个周期内计算得到的提前导通角提前导通。因为当前的导通角是上一个周期的提前导通角,所以并不是最优提前导通角,此时电流波形仍然滞后于反电动势波形,只是滞后的角度变小。当电机运行到第三个周期时,把前面两个周期的提前导通角相加得到当前周期的提前导通角,则电流滞后于反电动势的幅度进一步缩小,依次提前导通累加得到下一次的提前导通角,直到反电动势波形的交点和电流交点重合。
在这过程中可能会出现电流波形超前反电动势波形的情况,如图9所示。
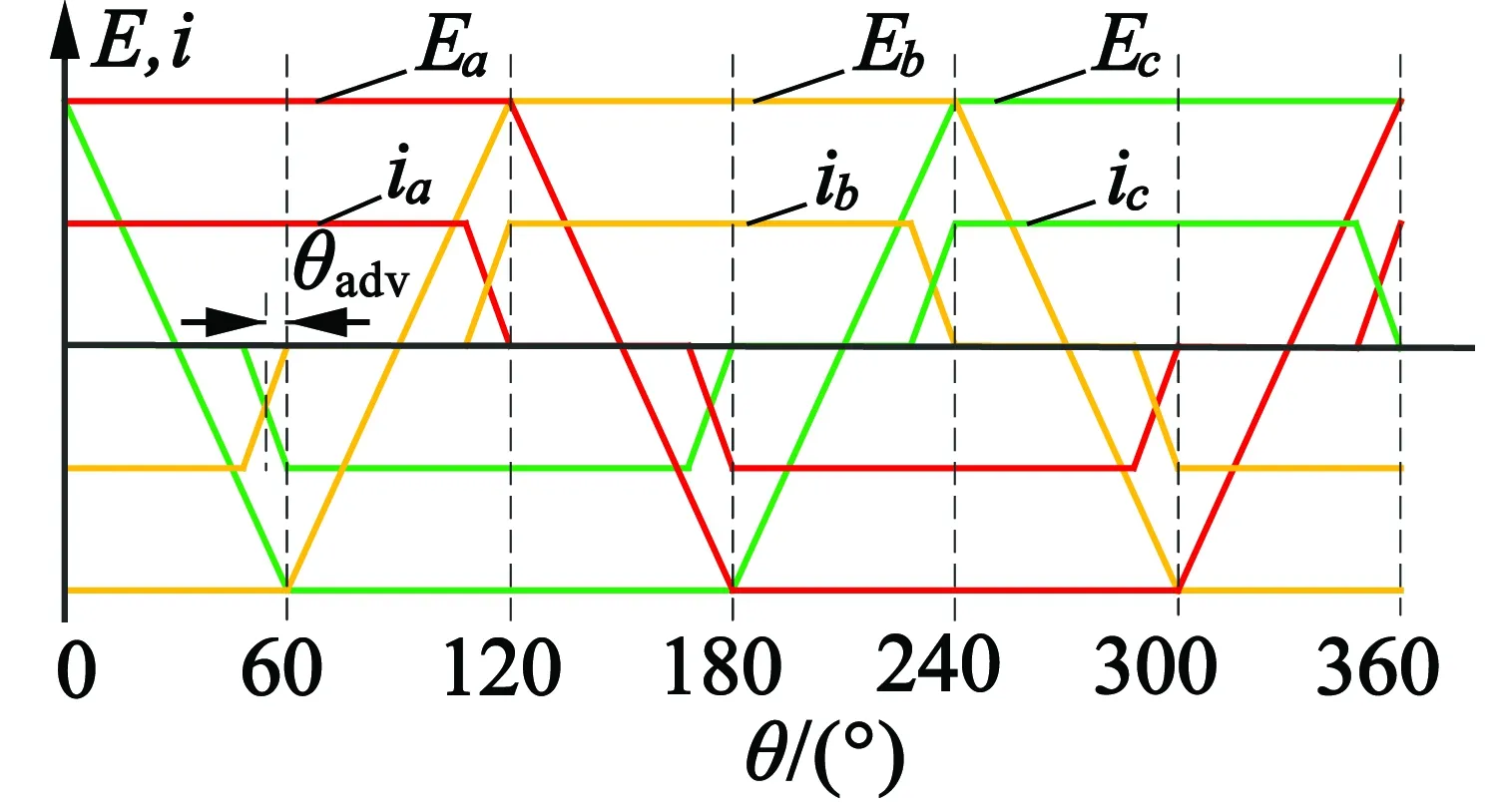
图9 超幅提前导通三相反电动势和电流波形
由图9可见,电流变化时刻已经提前到反电动势交点之前,提前角度过大,需要减小提前角度。开通相电流和关断相电流相等时给出触发信号,经过异或后a信号会有一个跳变,驱动采样信号进行采样,得到当前换相角度即信号c,同时标准角度也给出当前换相的标准角度d,两信号的角度差值为正,下一个周期的提前导通角等于当前换相周期提前导通角与本次计算出的提前导通角之和,提前导通角将变小,在一个换相周期会减小提前换相角度,使电流的交点逐渐趋近于反电动势交点。
图10显示了换相提前后反电动势和电流波形交点重合情况,电机趋于一个稳态之后,电机的提前导通角也趋于一个稳态值,电流交点与反电动势交点误差可以忽略,反电动势和电流波形交点重合。
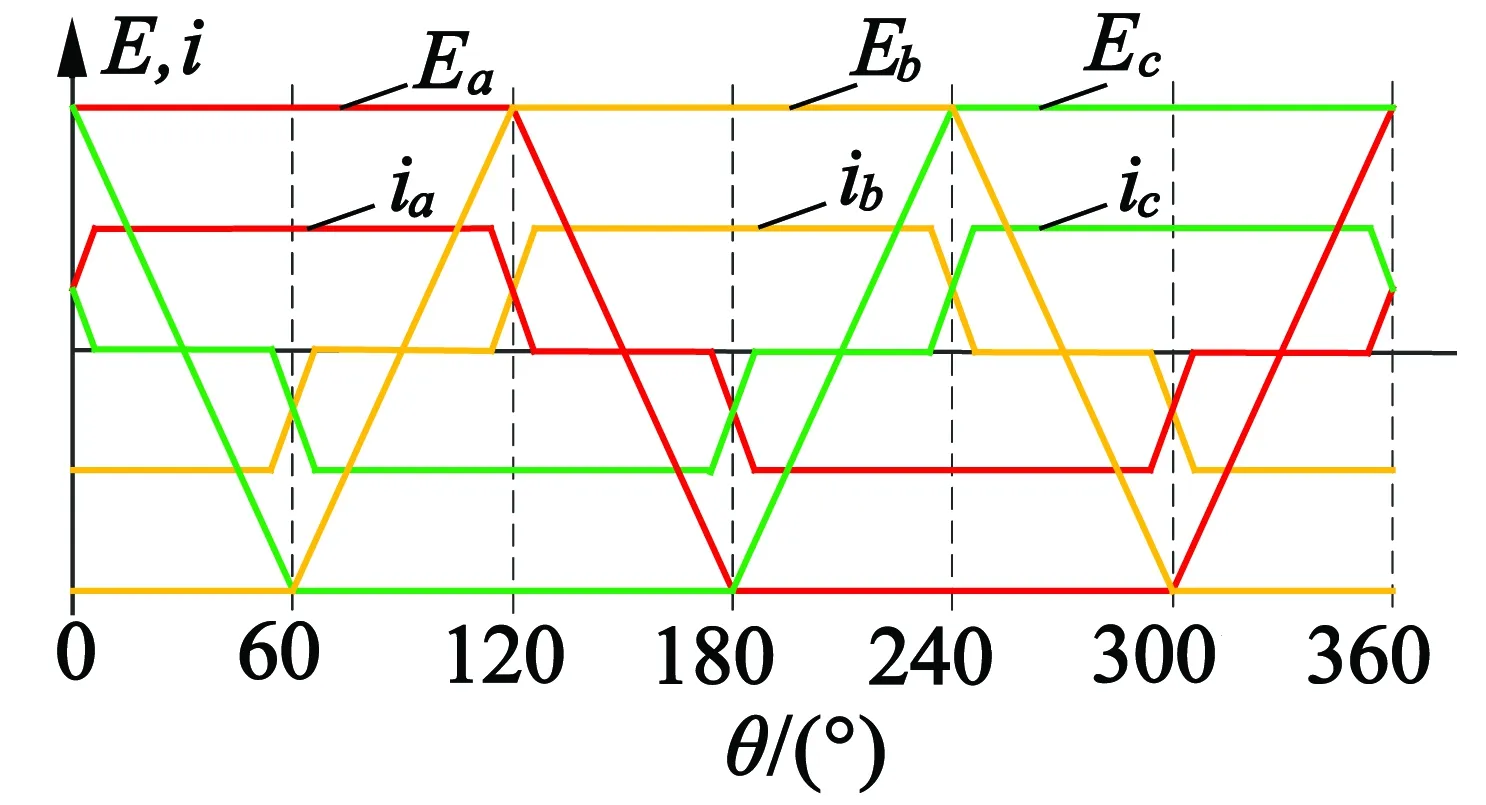
图10 反电动势和电流交点重合波形图
本文所研究的控制策略可以快速地取得控制效果,对于经常变化运行状态的无刷直流电动机也能快速适应,达到预期控制效果。由于电机运行在高速时开通相和关断相电流变化率并不相同,所以检测出的提前导通角并不一定是最优提前导通角。根据文献[2]中电流波形的中点与反电势波形的中点重合时相电流与反电动势的乘积最大,结合式(4)可知,此时电机的输出转矩最大。
1.4 PWM调制策略
控制策略中计算出的提前导通角是否为最优提前导通角取决于换相过程中开通相和关断相电流斜率,如图11所示。
图11(a)中显示当前换相周期内关断相电流下降斜率等于开通相电流上升斜率,根据相关定理可知,θ1=θ2,则θ1为最优提前导通角。图11(b)中显示当前换相周期内关断相电流下降斜率不等于开通相电流上升斜率,在这种情况下,一般θ1>θ2,则θ1不是最优提前导通角。
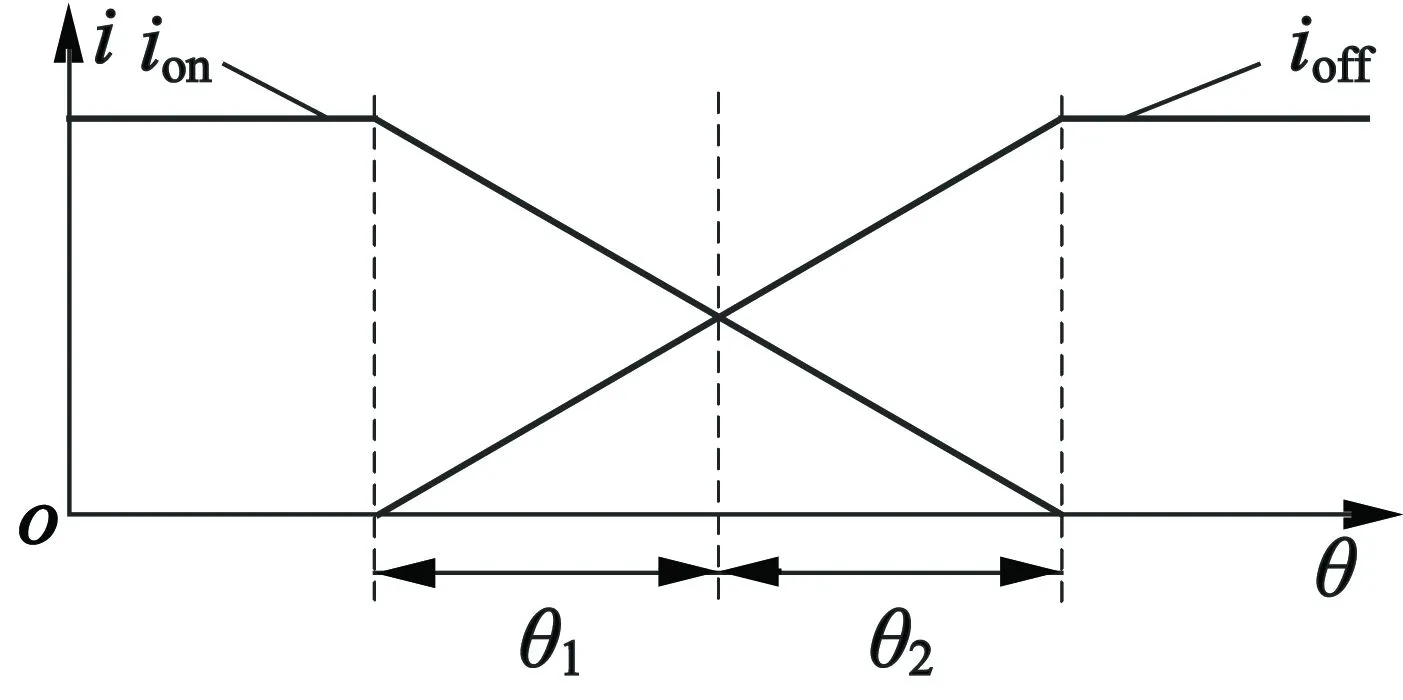
(a) 两相电流斜率相等
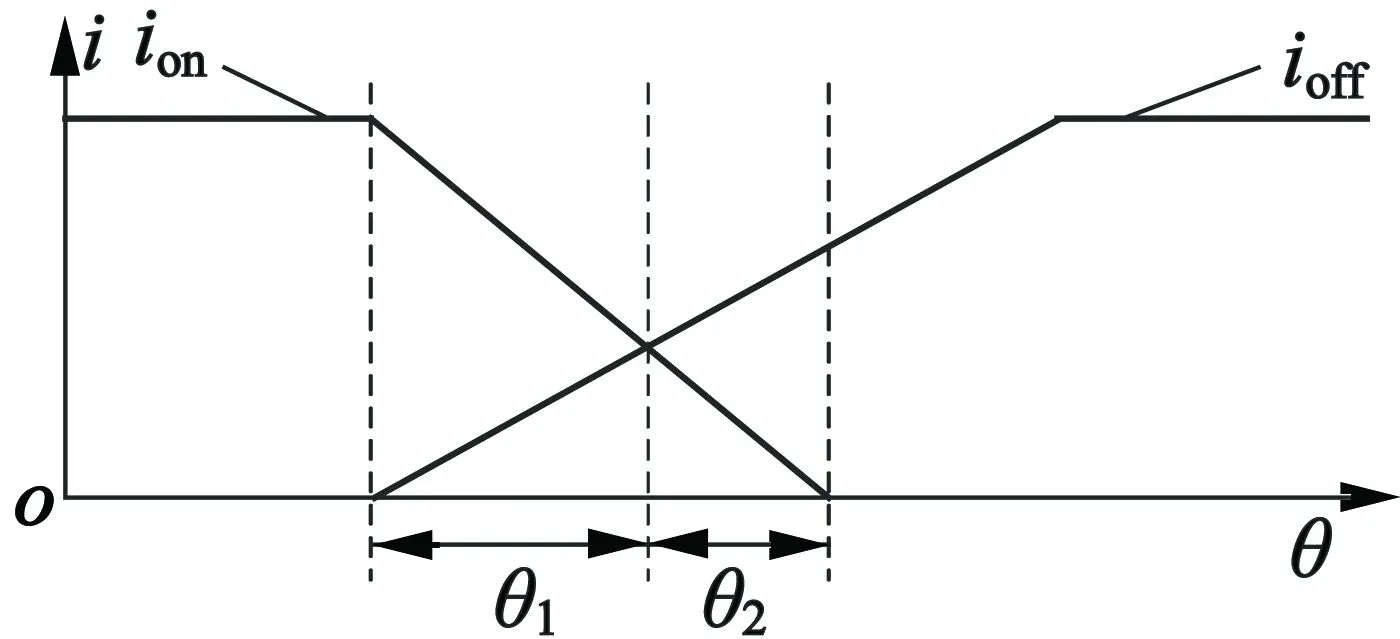
(b) 两相电流斜率不等
为了达到高速状态下电机开通相和关断相电流斜率一致,采取文献[4]中的PWM调制策略,在换相过程中,通过三相配合调制,将换相过程中的每个PWM周期分为3个功能区。通过计算给三相绕组中的每一相分配不同的调制占空比,使关断相电流的下降速度和导通电流的上升速度在每个PWM周期保持相等。
2 仿真验证及分析
为了验证以上控制策略能抑制转矩波动,克服高速时电机转矩下降的问题,根据电机控制系统框图建立MATLAB/Simulink仿真模型,对低转矩波动无刷直流电动机提前导通PWM控制方法进行了验证。仿真电机参数:相电阻R=0.33 Ω,相等效电感L=1 mH,母线电压Udc=135 V,电机极对数p=4。
当电机工作于中低速时,反电动势和电流都相对较小,电流变化较快,转矩波动较小。仿真电机额定转速1 000 r/min,负载5 N·m,图12显示了电机运行时反电动势和电流波形。为了符合实际情况,反电动势为非理想反电势,开通相和关断相电流幅值的交点滞后反电动势交点,在换相过程中非换相电流有明显的凹陷,电磁转矩也随之变小,换相转矩波动将达到峰值。图13显示了该状态下转矩波形,导通过程中转矩基本维持在5~6 N·m,换相过程转矩下降严重,跌落到3.8 N·m,转矩波动严重。
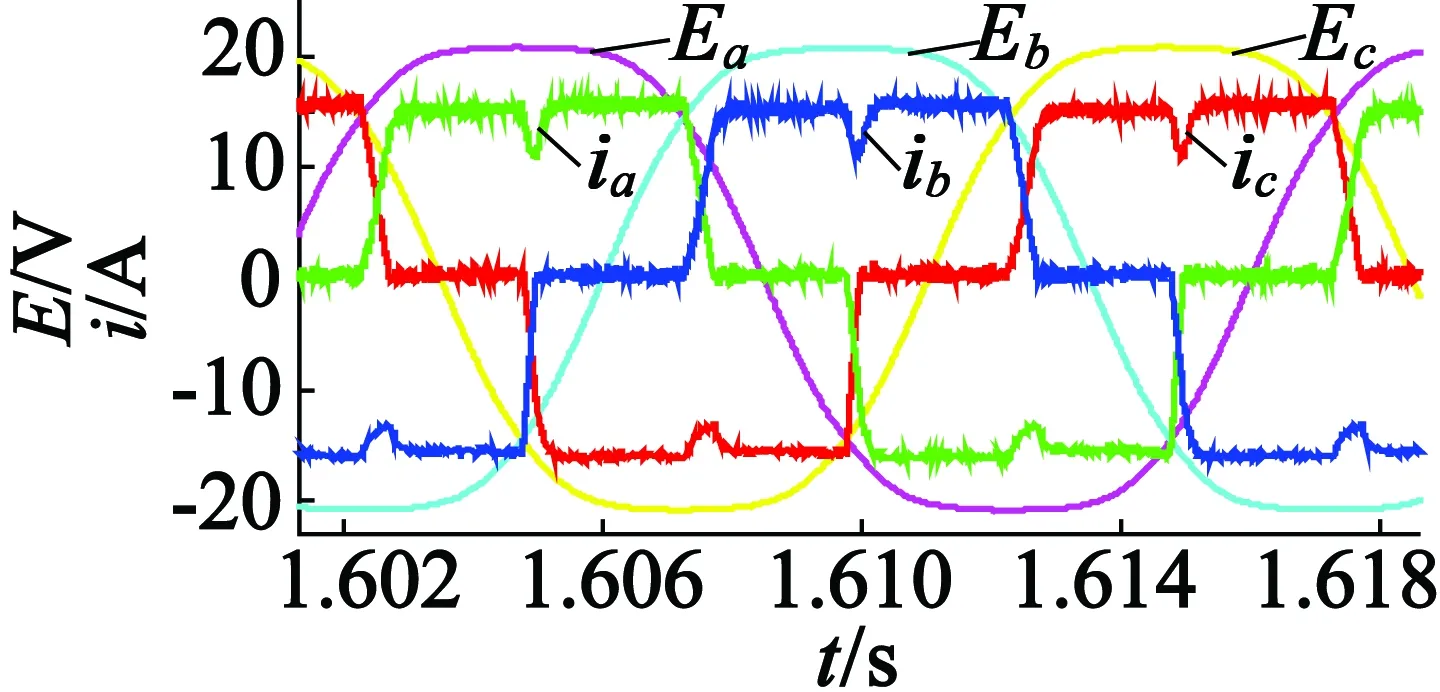
图12 中低速下未提前导通反电动势和电流波形图
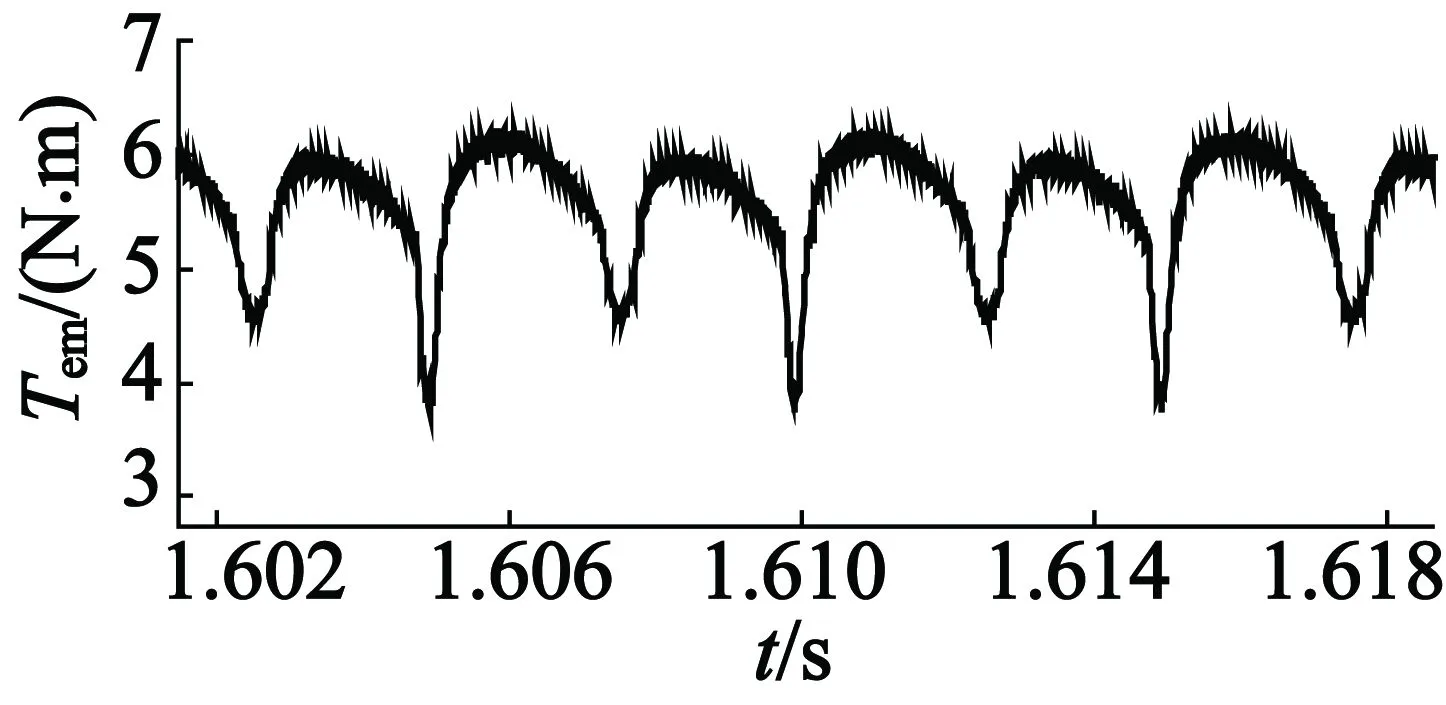
图13 中低速下未提前导通转矩波形图
在相同运行状态下,采用本文的控制策略,图14显示了提前导通下电机反电动势和电流波形。电流变化速度加快,换相时间变小,开通相和关断相电流交点与对应反电动势交点重合,非换相相电流没有明显的凹陷。图15显示了该状态下转矩波形,导通过程中转矩基本维持在5~6 N·m左右,换相过程转矩没有明显跌落,转矩波动抑制明显。
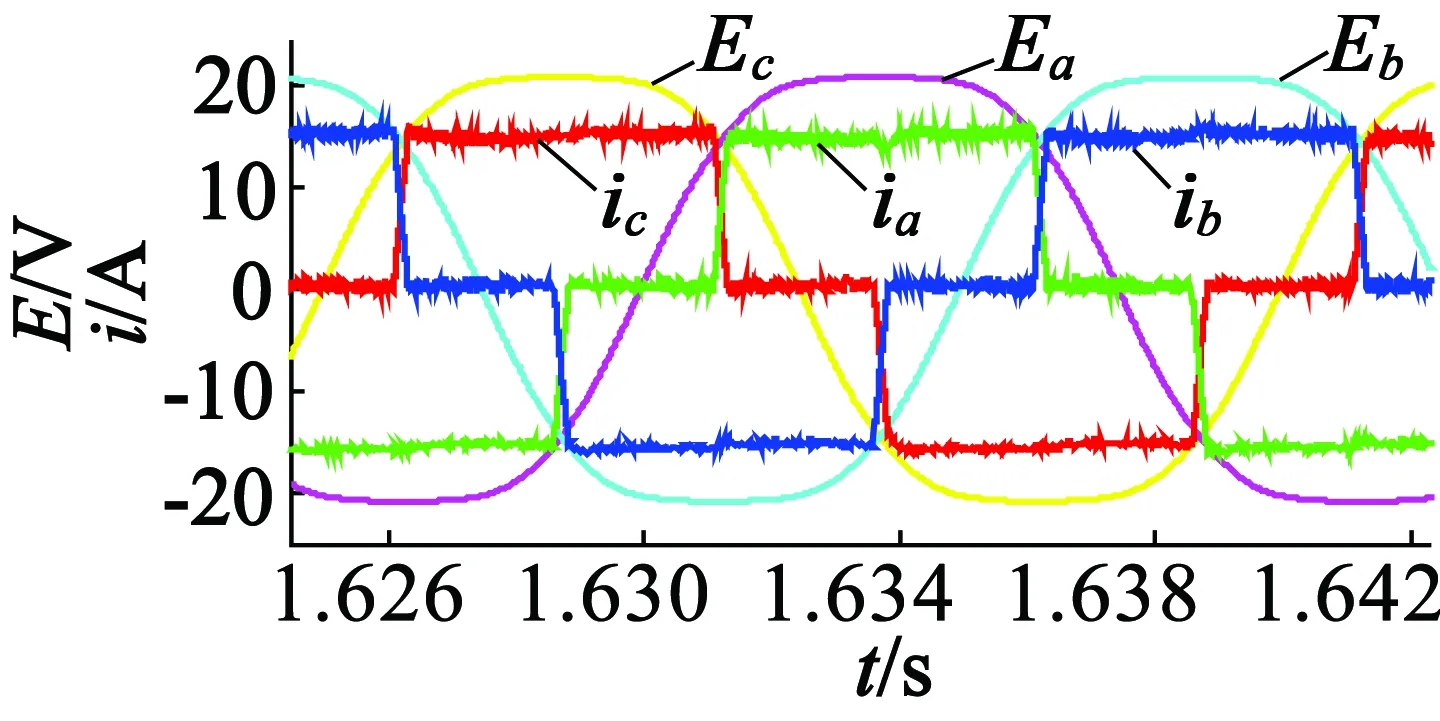
图14 中低速下提前导通反电动势和电流波形图
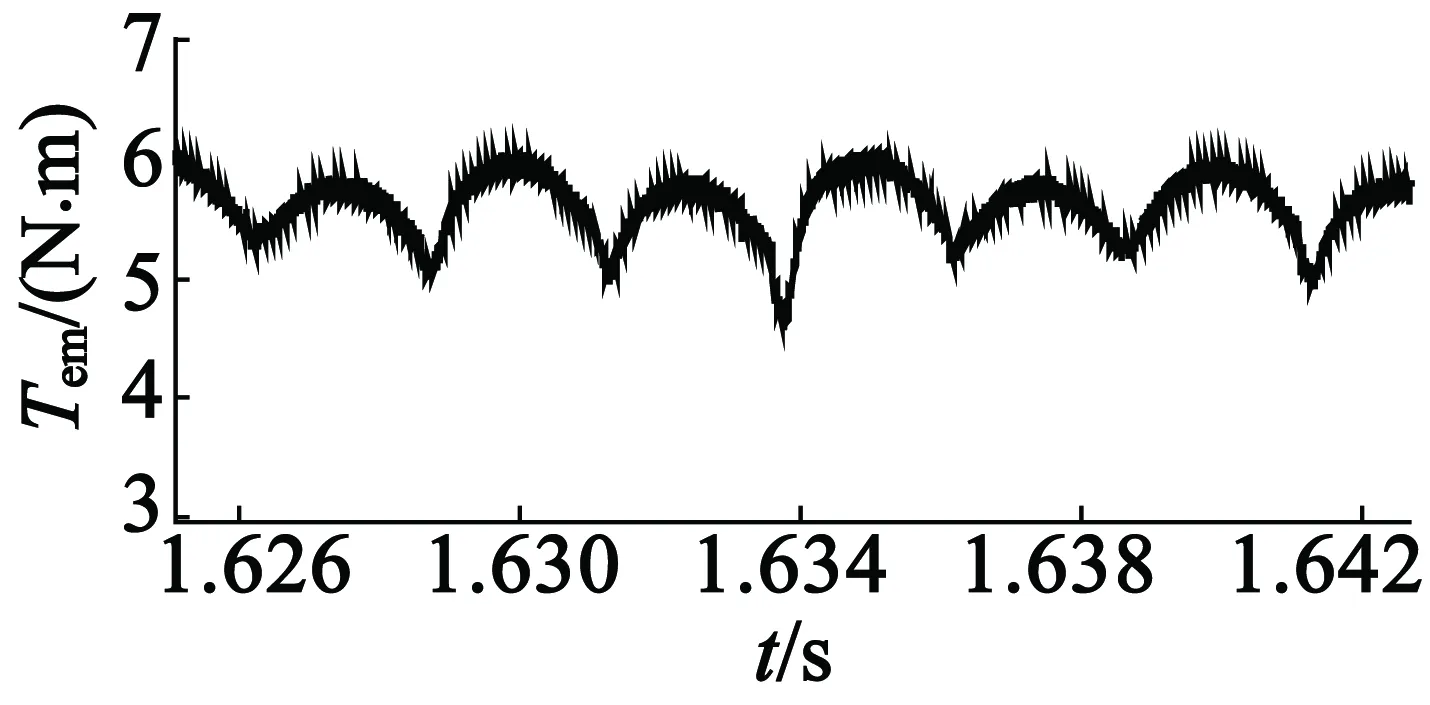
图15 中低速下提前导通转矩波形图
实际应用中,无刷直流电动机工作在高速且高载的情况越来越多,针对上述情况仿真了电机转速为2 500 r/min,负载5 N·m时运行结果。图16显示了传统控制策略三相6状态电机运行时反电动势和电流波形。中高速时电机反电动势和电流较大,电机换相时间变短,换相结束时开通相电流达不到峰值水平,严重滞后反电动势波形,非换相相电流凹陷明显。图17显示了该状态下转矩波形,导通过程中转矩不能维持一定水平,波动幅度大。
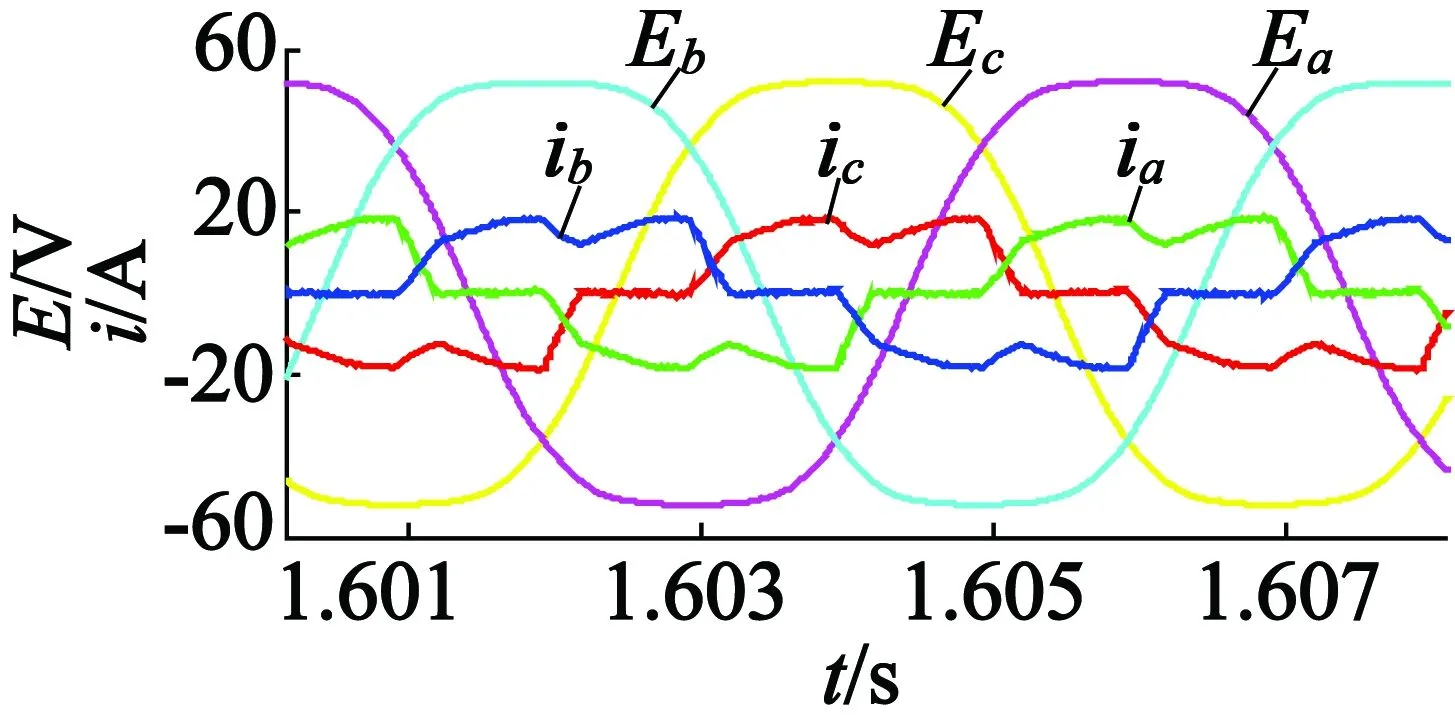
图16 高速下未提前导通反电动势和电流波形图
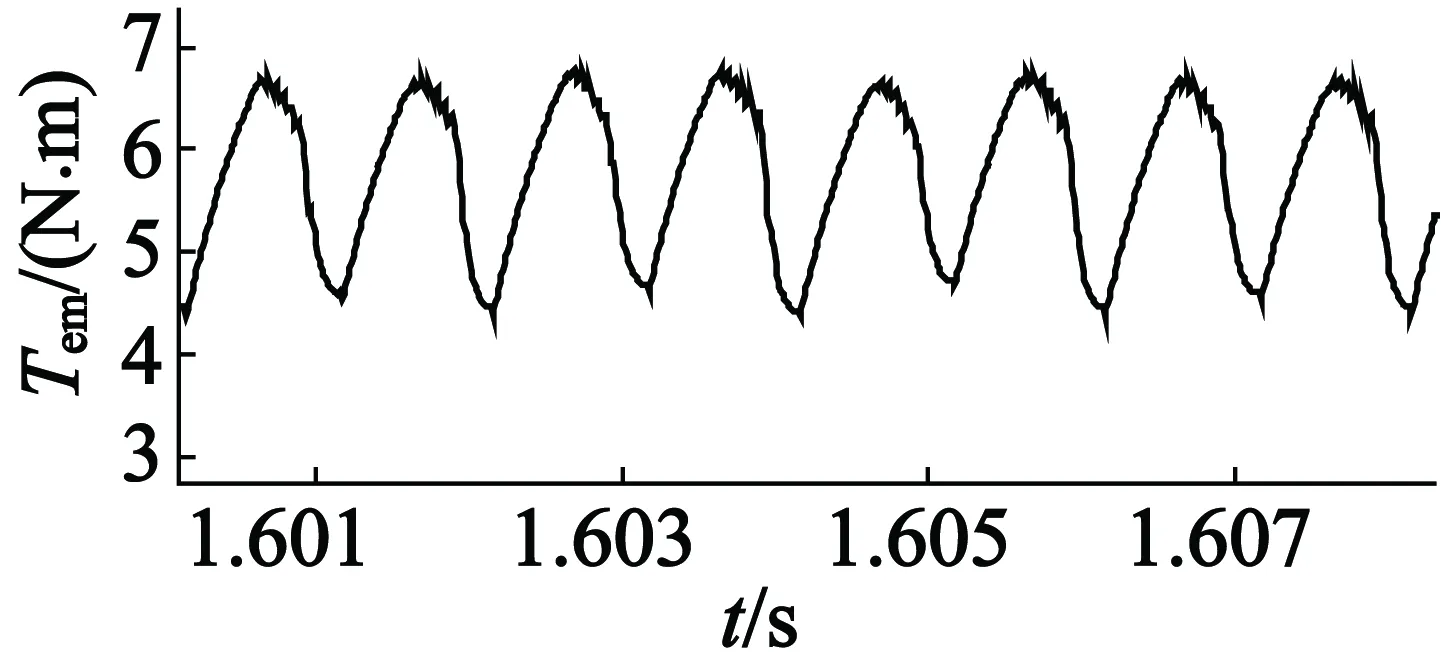
图17 高速下未提前导通转矩波形图
同理,采用本文的控制策略后,图18显示了提前导通下电机反电动势和电流波形。开通相电流上升速度加快,换相时间变短,开通相和关断相电流交点与对应反电动势交点重合,非换相相电流凹陷大幅度减小。图19显示了该状态下转矩波形,导通过程中转矩基本维持在6 N·m左右,换相过程转矩跌落不明显,相对于传统控制方式转矩波动抑制明显。
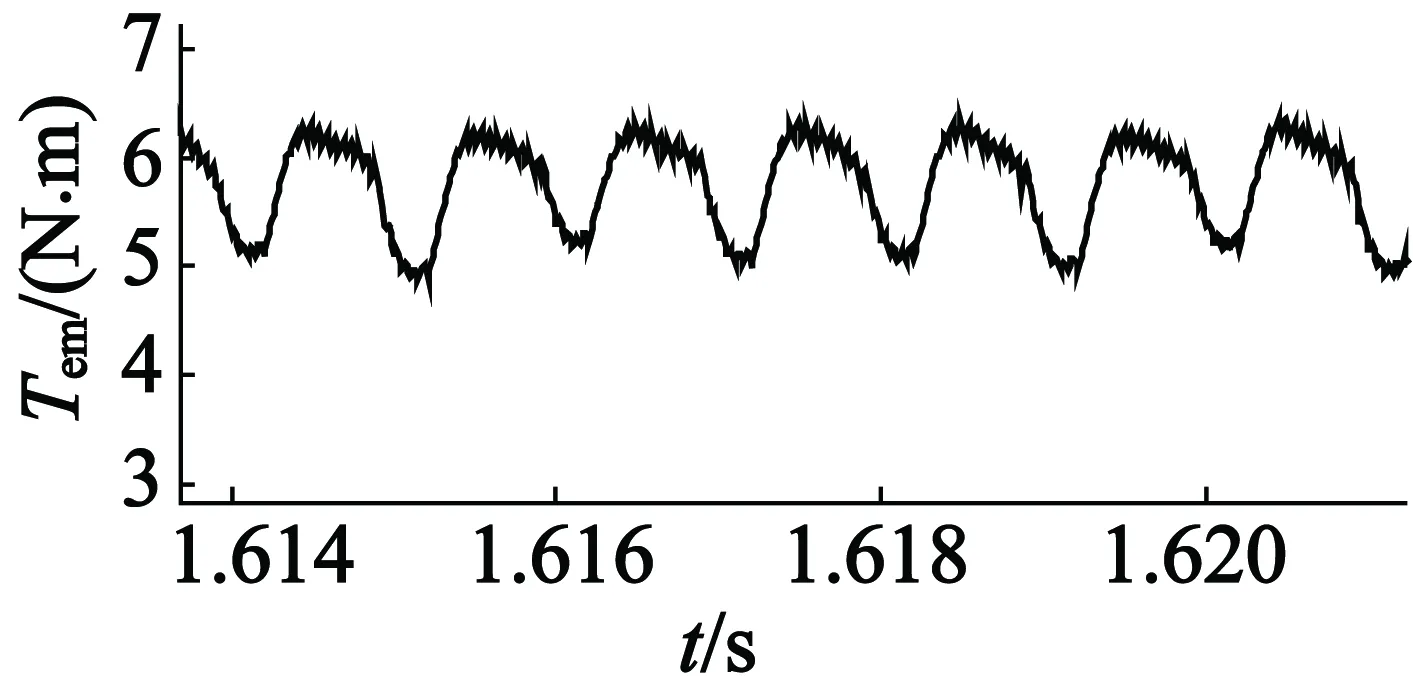
图19 高速下提前导通转矩波形图
3 结 语
通过研究提前导通控制策略下无刷直流电动机波动情况,针对现有的提前导通控制方法,研究了低转矩波动无刷直流电动机提前导通PWM控制方法,依据换相的实现方案进行仿真验证,简单有效控制无刷直流电动机提前导通,开通相和关断相电流交点与反电动势交点重合,转矩波动抑制明显,避免了高速段电机输出转矩下降问题。
[1] GU B G,PARK J S,CHOI J H,et al.Optimal lead angle calculation for brushless DC motor[C]//Power Electronics Conference.IEEE,2010:1416-1420.
[2] 罗宏浩,吴峻,赵宏涛,等.永磁无刷直流电机换相控制研究[J].中国电机工程学报,2008,28(24):108-112.
[3] 赵宏涛,吴峻.定子磁链提前换相增加直线永磁无刷直流电机的推力[J].中国电机工程学报,2011,31(3): 118-123.
[4] SHI J,LI T C.New method to eliminate commutation torque ripple of brushless DC motor with minimum commutation time[J].IEEE Transactions on Industrial Electronics,2013,60(6):2139-2146.
[5] SHINN M S,KUN L,JHIH S S,et al.A phase advanced commutation schene for IPM-BLDC motor drives[C]//Industrial Electronics and Applications.IEEE,2009:2010-2013.
[6] KANG B H,KIM C J,MOK H S,et al.Analysis of torque ripple in BLDC motor with commutation time[C]//International Symposium on Industrial Electronics.IEEE,2002:1044-1048.
[7] 谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011.
[8] 胡明桦,杨艳,郭鸿浩.一种改进的无刷直流电动机转矩波动抑制策略[J].微特电机,2016,44(6):74-77.
[9] 胡勤丰,严仰光.永磁式双凸极电机角度提前控制方式[J].电工技术学报,2005,20(9):13-18.
[10] 石坚,李铁才.一种消除无刷直流电动机换相转矩脉动的PWM调制策略[J].中国电机工程学报,2012,32(24):110-116.
APhaseAdvancedCommutationSchemewithLowTorqueRippleforBrushlessDCMotor
YANGYan,HUMing-hua,GUOHong-hao
(Nanjing University of Posts and Telecommunications,Nanjing 210023,China)
Abstract:The torque ripple limits the application of brushless DC motors in high precision and stability system. Some problems come out, such as the increasing torque ripple and the descending output torque descending can be caused by high rotated speed. With the analysis of torque ripple in the process of advanced commutation according to the equivalent model, a simple advanced commutation PWM modulation scheme was proposed. This controlling scheme made the current point of intersection ahead to the BEMF’s and leads the angle dynamically adjusted with the changing motor running state. A control method process was provided and the MATLAB/Simulink simulation module was built. The simulation results verified the effect of the controlling method that can suppress torque ripple and descending output torque.
Key words:brushless DC motor; output torque descending; advanced commutation; low torque ripple; adjust dynamically
中图分类号:TM33
A
1004-7018(2018)05-0019-05
2017-01-13
国家自然科学基金青年科学基金项目(51507083)
