基于GPS数据的高速公路车辆异常行为检测
2018-05-31杨龙海
杨龙海,徐 洪,张 春
(1. 哈尔滨工业大学 交通科学与工程学院,黑龙江 哈尔滨 150090; 2. 重庆市交通规划研究院,重庆 401147)
0 引 言
高速公路交通拥挤和交通安全已成为现今交通领域的一个重要研究课题。车辆异常行为是造成高速公路拥挤、引起交通事故的重要原因。高速公路车辆异常行为主要有车辆超速行驶、车辆低速行驶、倒车逆行、紧急制动、临时停车、紧急停车、轨迹异常等。车辆速度、加速度变化是连续变化的曲线,车辆表现出以上异常行为都存在着一个变化过程,最终呈现出稳定状态。
若能在车辆开始出现异常行为变化时就对车辆行为进行检测判断、提示预警,当车辆达到最终状态时即能马上判断出该车状态,并提出最终预警,这将大大缩短车辆事件检测时间、及时预警和上报管理中心,能快速对该事件进行处理、预防二次事故的发生。可见,实时进行车辆异常行为检测有助于预防高速公路二次事故发生,减少高速公路拥挤度,降低车辆延误,提高高速公路运行效率,进而实现低碳安全出行目标。车辆异常行为检测早期主要采取移动电话、紧急电话、路政巡逻等手段向交通监控中心通报信息。这类在事件发生地由目击者“手工”识别的方法,易时滞并延长事故清除时间,起不到预防处理的作用。所以研究车辆异常行为自动检测算法,对其进行动态反馈已成为研究者们的一个重要研究方向。
车辆异常行为检测大致分为两类。一是基于视频数据进行检测,SANG Haifeng等[1]通过视频数据对车辆速度和轨迹进行跟踪检测分析;邱凌赟等[2]提出了一种基于车道模型知识自底向上的车辆异常检测方法;罗金满等[3]采用高斯混合模型对车辆跟踪路径和车速进行估计,然后对事件进行判断。第二类是基于智能手机终端数据进行检测,陈恺[4]和周后飞等[5]分别根据手机检测车辆的加速度、转角等参数对车辆异常行为进行检测;赵燕等[6]根据手机定位数据建立了基于云计算的移动公路运输监管系统。此外,还有学者通过GPS数据或者仿真数据进行研究,I.MOHAMAD等[7]采用GPS数据及方向盘转角对车辆加速过快、减速过快和频繁变道等3种驾驶行为进行了检测;杨志勇[8]通过仿真数据分析提出基于模糊逻辑的高速公路异常事件检测算法。
国内外对高速公路车辆异常行为检测研究主要还是基于视频,并借助其他车辆检测装置对车辆轨迹进行检测判断。虽都具有较好的检测效果,但针对高速公路视频装置不完善的路段和没有相应参数检测装置的车辆,现有算法则不能对这些情况下的异常行为进行检测判断。
针对这一问题,笔者提出设计一个高精度GPS单向通讯定位装置。该装置为盒状,在车辆进入高速公路系统时发给车辆,录入车辆相应信息,如车牌号、驾驶员等,车辆离开高速公路时收回。这样可确保高速公路上的所有车辆都具有高精度GPS定位装置,其定位精度为厘米级,定位间隔为1s甚至更短。单向通讯是指交通管理中心可根据车辆GPS数据进行处理分析,判断车辆是否出现异常,若有异常则对车辆提出预警。
在这个背景下,笔者针对如何采用GPS数据对车辆异常行为检测判断进行了研究。主要工作有:① 利用车载GPS装置实时采集车辆定位信息,提出了车辆异常行为检测方法框架,并分析了超速、倒车逆行、低速行驶、紧急制动、临时停车、紧急停车等7类异常行为的GPS数据特性。② 设计了基于GPS数据的车辆异常行为分级检测算法。③ 通过VISSIM软件对各类异常行为进行模拟仿真,利用检测率、误报率这2个指标对设计算法进行评价分析。
1 方法框架
笔者提出的车辆异常行为检测方法框架如图1。方法流程包括:① 通过车载GPS装置获得车辆动态数据;② 将GPS数据通过坐标转换得到高斯坐标下的数据;③ 提取经转换后的车辆动态参数特征;④ 采用标准偏差法和神经网络对车辆行为进行识别,并对识别车辆异常行为进行分级预警。
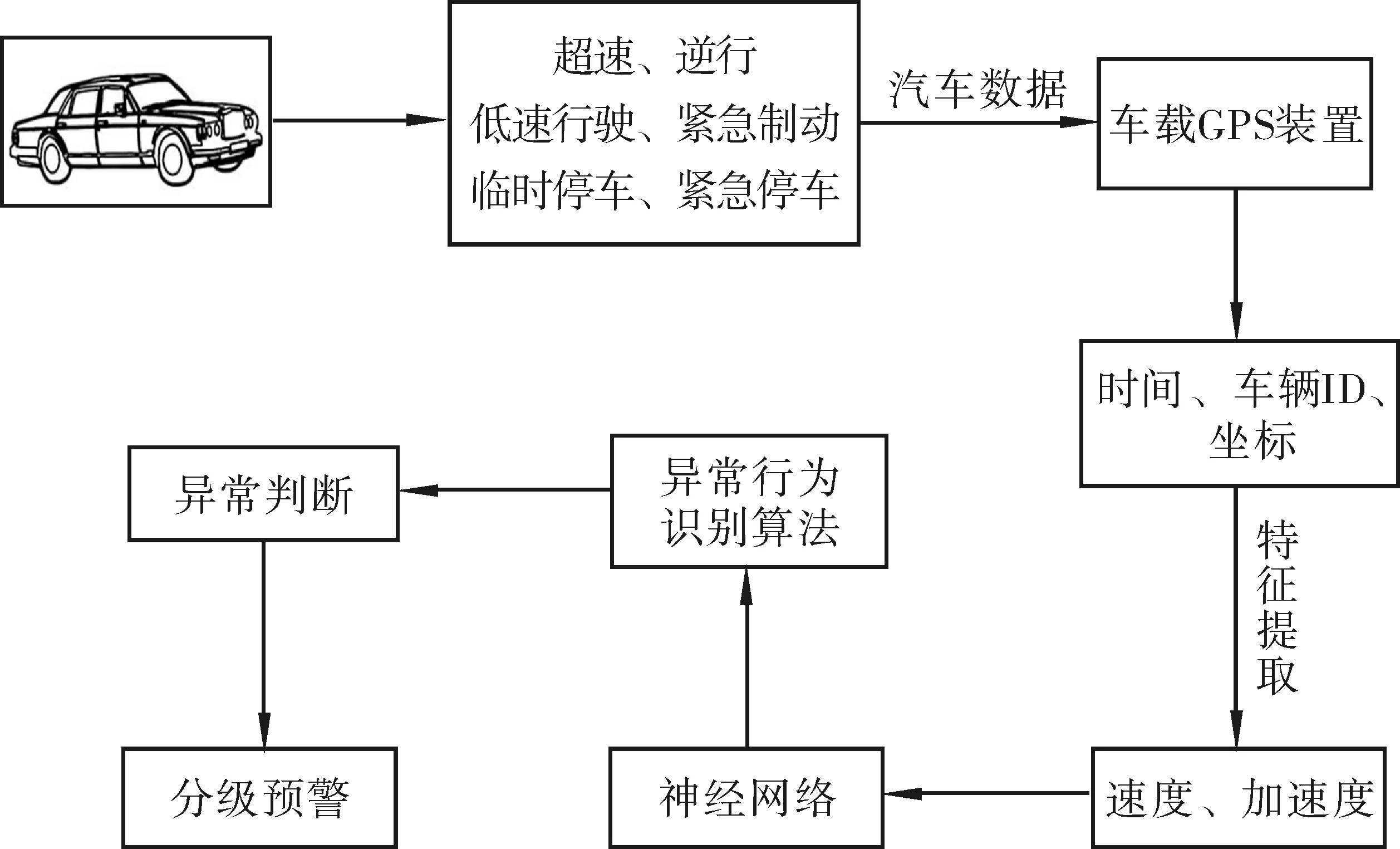
图1 方法框架Fig. 1 The framework of the proposed method
值得注意的是,文中方法是采用一辆车的特征信息进行异常行为判断。由研究背景中所有车辆都具有GPS定位装置,故完全可根据多辆车的GPS定位信息,进而提取车辆运行特征信息。但由于笔者研究检测的异常行为主要是单车独立异常行为,如紧急变速、停车、逆行等,这些行为在不考虑其它车信息下也能进行判断,为减小算法运行负荷,所以采用单辆车定位信息进行异常行为判断。
2 车载GPS数据
车载GPS能实时反馈车辆动态信息,包括车辆ID、反馈时间、车辆经纬度等。这些数据主要表现出两个特征:一是针对每辆车,该定位数据均是一个时间序列数据,可获得车辆连续的运行特性;二是每辆车有一个位置定位,可获得车辆之间的相对位置特性。根据定位时间序列数据可计算出车辆的速度、加速度,从而可对单车驾驶行为进行实时监测;根据车辆间相对位置信息可大致估算车辆间的车头间距、车头时距等信息,从而可对跟车过近等危险驾驶行为进行检测;将高速公路分段后,还可计算出路段上车辆平均速度和平均密度等参数,进而能从宏观上对高速公路运行情况进行评价。
GPS装置反馈定位坐标系为WGS-84全球坐标系,而文章采用的坐标系为1954年北京坐标系,故在进行数据分析前,首先需将车辆定位坐标进行转换[9]。经过坐标转换后,即可对车辆加速度、速度等参数进行计算,如式(1)、(2)。
(1)
(2)
通过GPS实验和VISSIM软件仿真获得车辆在超速、倒车逆行、低速行驶、紧急制动、临时停车、紧急停车和正常行驶时的车辆定位数据,计算出车辆速度和加速度变化,分析参数变化情况。定位数据为1 s,几种车辆行为状况下的参数变化如图2。
由图2(a)可知:高速公路车辆正常行驶过程中,车辆速度、加速度是不断波动的,加速度波动范围为[-1.5,1.5],速度则在110 km/h上下。
由图2(b)可知:高速公路车辆超速时,其加速度变化同正常情况下的加速度变化无明显差别,而速度则由正常速度缓慢加速,超过最高限速120 km/h,在140 km/h左右波动。
由图2(c)可知:车辆发生临时停车时,其速度存在一个正常减速过程,由110 km/h到停车大约25 s;在制动过程中减速度变化不剧烈,最大减速度为-2 m/s2左右。
由图2(d)可知:车辆在低速行驶时,存在一个由正常速度减速至最低限速以下过程(或进入高速公路就采用低速行驶);在低速行驶中,车辆速度低于高速公路最低限速(60 km/h),而加速度变化同正常行驶中的变化无明显区别。
由图2(e)可知:车辆在发生紧急停车时包含两个过程,一是紧急制动,二是停车。车辆从100 km/h减速为0大约8 s;制动过程中减速度变化剧烈,快速达到最大减速度-6 m/s2,然后逐渐减小。发生紧急制动、紧急停车时车辆减速度大于正常行驶过程中驾驶员采用的一般减速度,会使驾驶员产生不舒适感。
由图2(f)可知:车辆先减速为0,然后反向加速行驶,车辆在倒车逆行过程中速度为负值,此时对应的加速度负值表示车辆逆向加速,而正值表示该车减速,在倒车逆行过程中其加速度变化不大。车辆在高速公路出行倒车逆行行为,主要存在3种情况:车辆错过匝道,减速倒车;车辆错过匝道,掉头逆行;对向车道车辆越过中央分隔带逆行。前两种情况都是车辆减速为0,然后速度为负值的过程;而第3种情况车辆速度直接为负值。
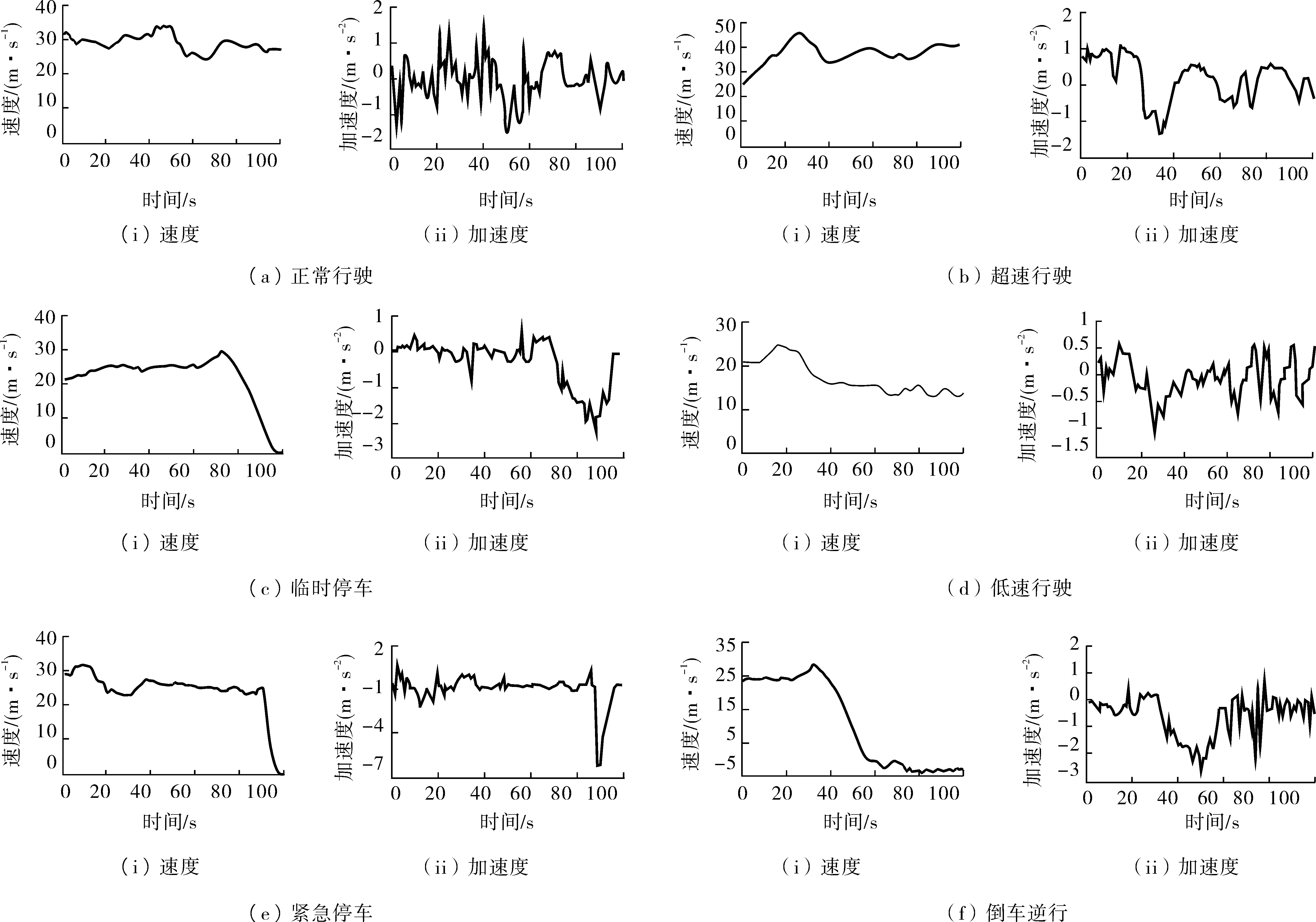
图2 不同车辆行为的参数变化Fig. 2 Parameters curves corresponding to various vehicle behaviors
综合分析这6种驾驶行为发现,车辆只有在紧急制动下,其加速度则剧烈变化。临时停车过程中,减速度最大值略大于正常行驶中的波动值。发生以上几种异常行为时,车辆速度都存在变化过程,且最终值存在明显差异。因此根据速度的最终大小、正负情况以及加减速度变化剧烈情况可对上述几类异常行为进行分类检测。
3 车辆异常行为分级检测算法
3.1 分类规则
基于对GPS定位数据分析,车辆在运行过程中其参数变化是非线性、随机、时变的,车辆异常行为分类可看作一个非线性分类识别问题。人工神经网络具有较好的非线性映射、分类与识别、优化计算等功能,因此笔者设计采用神经网络进行车辆异常行为检测。类似研究也较多,如LU Jian等[10]曾提出过偏最小二乘法和神经网络混合模型进行高速公路事件检测。
采用BP神经网络作为车辆异常行为检测分类器,将连续N次定位的车辆速度、加速度作为输入参数,采用神经网络对参数进行数据趋势分析,判断事件类型。以正常行驶、超速、倒车逆行、低速行驶、紧急制动、停车行为这6种车辆驾驶行为作为神经网络输出结果。
神经网络的6种状态大致分类规则如下:
1)超速行为:在连续定位参数序列中,后50%的速度值都超过高速公路规定最高限速(设定为120 km/h),且从加速度趋势中分析该状态较为稳定,没有下降趋势。
2)倒车逆行行为:在定位数据中检测到速度值为负值,且其后续没有大于0的速度值。
3)低速行驶:在连续定位参数序列中,后50%速度值都低于高速公路规定最低限速(设定为60 km/h),且从加速度趋势中分析该状态较为稳定,没有加速趋势。
4)紧急制动:对应不同速度下,判断紧急制动减速度阈值是不同的,所以通过神经网络训练学习,根据车辆速度和减速度来判断车辆是否发生紧急制动。
5)停车行为:在定位数据中检测到速度值减为0,且其对应加速度也为0,后续车辆仍静止不动。
6)正常行为:除上述5种情况的其他状态。
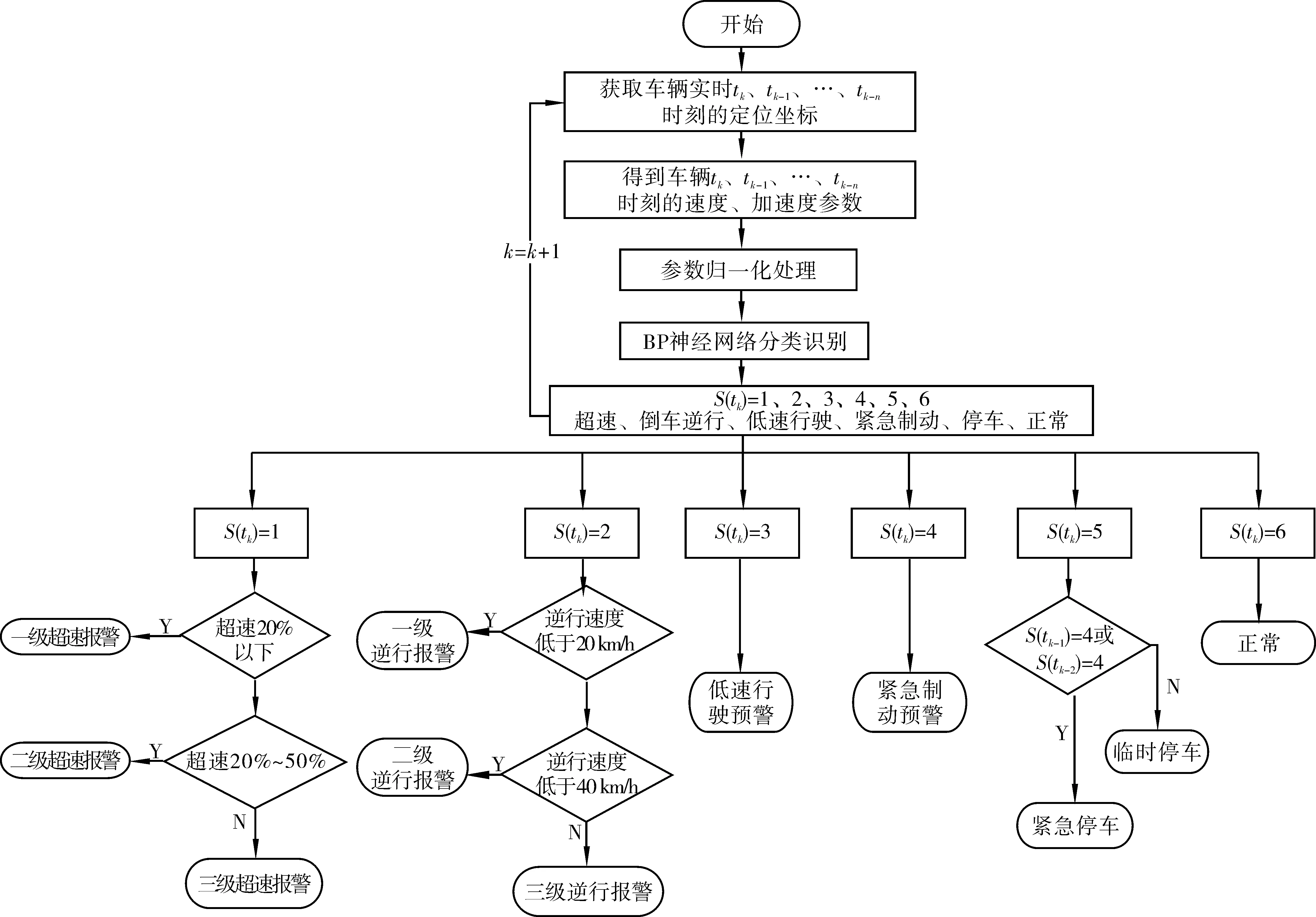
图3 分级检测算法Fig. 3 Hierarchical detection algorithm
3.2 分级反馈预警系统
神经网络分类器对车辆行为进行分类识别,识别之后系统需要对异常行为进行反馈预警。由于交通管理法规在对超速等行为进行处罚时,考虑了违规行为对交通流影响的大小,规定了不同等级的处罚措施。可见,针对相同的违规驾驶行为,其影响程度也不相同,所以笔者进行了分级反馈预警系统设计,如图3。
3.2.1 超速分级预警
1)1级超速预警:检测到超速车辆在tk时刻速度超速20%以下。
2)2级超速预警:检测到超速车辆在tk时刻速度超速20%以上,50%以下。
3)3级超速预警:检测到超速车辆在tk时刻速度超速50%以上。
3.2.2逆行分级预警
1)1级逆行预警:检测到逆行车辆在tk时刻逆行速度小于20 km/h。
2)2级逆行预警:检测到逆行车辆在tk时刻逆行速度大于20 km/h,小于40 km/h。
3)3级逆行预警:检测到逆行车辆在tk时刻逆行速度大于40 km/h。
3.2.3 停车分级预警
1)紧急制动预警:检测到车辆发生紧急制动行为。
2)低速行驶预警:检测到车辆发生低速行驶行为。
3)临时停车预警:检测到车辆发生停车行为,且前两次判断中没有发生紧急制动行为。
4)紧急停车预警:检测到车辆发生停车行为,且在前两次判断中有发生紧急制动行为。
笔者提出分级检测算法,通过神经网络对车辆行为进行分类识别后,根据异常行为分级预警原则,对车辆行为进行分级检测。
综上所述,基于GPS定位数据的高速公路车辆异常行为检测算法主要包括:提取车辆动态参数、采用神经网络对车辆驾驶行为状态识别、针对不同异常驾驶行为进行分级预警。
4 检测算法性能评价
4.1 数据来源
通过4辆装有GPS装置的车辆在哈尔滨某高速公路(最高限速为120 km/h,最低限速为60 km/h)上模拟超速、低速行驶、临时停车、紧急制动等驾驶行为,获得车辆GPS定位数据。此外通过VISSIM软件仿真各种驾驶行为,并对实验数据进行补充。最后获得样本数据共1 120组,其中超速样本204组,倒车逆行样本142组,低速行驶200组,紧急制动74组,停车行为200组(临时停车126组,紧急停车74组),正常行驶样本300组。其中紧急制动、紧急停车、逆行这3种行为仿真数据占50%;超速、低速、临时停车、正常行为对应的仿真数据占20%。
将上述数据分为训练集和测试集两个部分,其中约2/3用于神经网络训练,剩余部分用于测试。采用检测率(detection rate, DR)、误报率(false alarm rate, FAR)对所提出的检测算法性能进行评价。两个检测指标的计算如式(3)、(4)。
检测率RDR:
(3)
误报率RFAR:
(4)
式中:Ep为实际检测事件数;Ef为实际发生事件数;Ae为事件检测误报警数;Al为事件检测报警数。
4.2 参数标定
设计算法中需要标定的参数有神经网络输入层所需要的连续定位次数N,神经网络隐含层神经元个数P,以及神经网络中其它相应参数。在确定参数N取值时,首先确定初始值N=3,然后以步距为1进行调整,选取检测效果最好时参数N的取值。隐含层神经元个数P的取值方法采用王立威[11]所提出的方法,采用S型函数作为激励函数,由有训练误差和期望误差来确定最优隐含层个数。
经过实验计算,当N=11,且隐含层含有19个神经元时,笔者所提出的算法检测效果最好,即训练神经网络为22×19×6格式,训练时间为1 s,用训练好的网络对数据进行分类,接近瞬间完成。
4.3 实验结果分析
利用340组数据对训练好的神经网络进行测试,测试结果见表1。
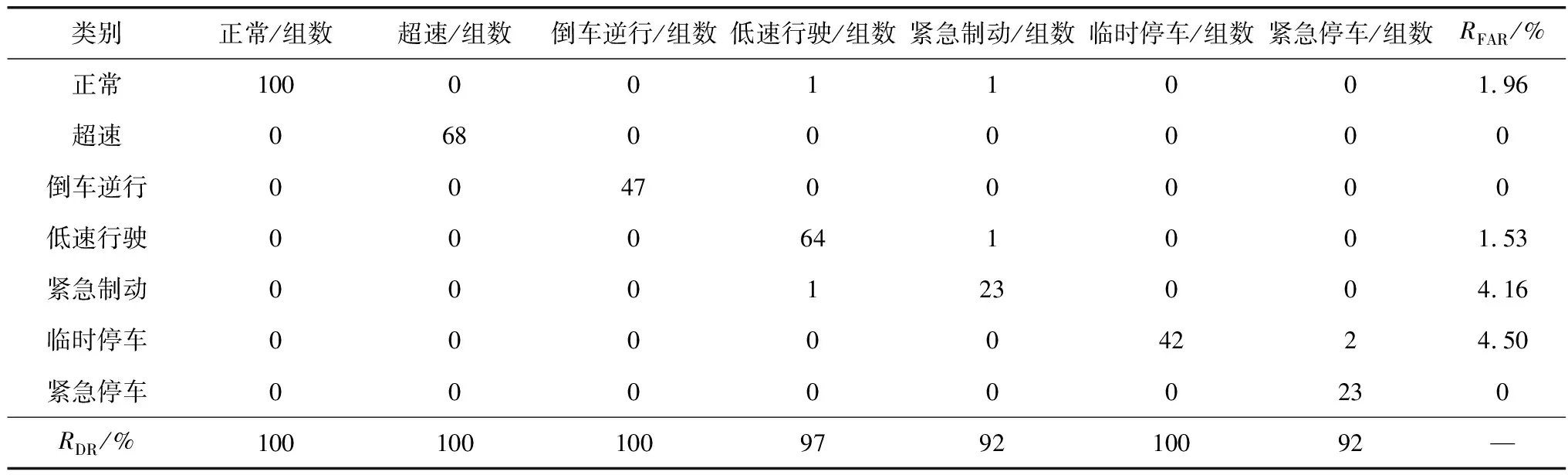
表1 文中检测算法检测结果Table 1 Detection results of the proposed detection algorithm
由表1可看出:一共66组低速行驶数据,其中64组数据被正确检测,一组被判定为正常行为,一组被判断为紧急制动,所以低速行驶行为检测率为97%;也可看出:低速行驶状态共检测到65组,正确检测64组,另一组紧急制动状态误判为低速行驶状态,其误报率为1.53%;其他行为类别的检测率和误报率计算方法类似。
通过数据检验结果可发现:设计的算法在几种驾驶行为判别中存在误报现象。其中低速行驶误判为正常行驶的,主要发生在车辆由正常行驶过渡到低速行驶过程时刻,这时存在着模糊性,导致误判;低速行驶和紧急制动存在着相互误判,以及紧急制动误判为正常行驶,主要是由于判断紧急制动减速度与对应速度存在着相关性,不能单纯根据减速度大小来判断紧急制动行为,这就增加了行为判断的难度;由于紧急制动误判,导致紧急停车检测率下降,将紧急停车误判为临时停车。这些检测率、误判率还与训练样本数据有关,由于笔者采样样本不大,所以可能在误报率上存在误差,若加大训练样本和测试样本,事件误报率应该会有所下降。
总体来看,设计的分类检测算法对各类异常行为检测率都比较高,能够较好地识别检测各类车辆异常驾驶行为。
5 结 语
笔者通过高速公路车辆GPS定位数据,提取出车辆的速度、加速度、位置信息,将连续11次定位的车辆速度、加速度作为输入参数,训练出检测性较好的神经网络分类器,并设计了车辆异常行为分级检测算法。通过实验验证,可看出:车辆异常行为分级检测算法对车辆的超速、倒车逆行、低速行驶、紧急制动、临时停车、紧急停车的识别效果令人满意,具有检测率高、分类精度高、速度快等特点。可见高速公路基于收发GPS单向通讯盒,获得每辆车实时定位数据,根据笔者提出车辆异常行为检测算法,能实时检测车辆驾驶行为,实时反馈异常行为,有助于高速公路系统的智能管理,有效降低高速公路交通事故风险。
笔者提出的算法也存在某些不足。例如网络训练需要大量的样本数据,各个驾驶行为检测率没达到100%,还存在着一定的误报率。在接下来的研究中,笔者将改进车辆驾驶行为的分类算法,将模糊理论、关联规则理论等融入到分类算法中,提高分类精度。此外,车辆异常行为反馈信息发布规则、发布范围等方面也是今后的研究方向。
参考文献(References):
[1]SANG Haifeng, WANG Hui, WU Danyang. Vehicle abnormal behavior detection system based on video [C]//FifthInternationalSymposiumonComputationalIntelligenceandDesign. U.S.A: IEEE, 2012:132-135.
[2] 邱凌赟,韩军,顾明.车道模型的高速公路车辆异常行为检测方法[J].计算机应用,2014,34(5):1378-1382.
QIU Lingyun, HAN Jun, GU Ming. Abnormal behavior detection for highway vehicle based on lane model[J].JournalofComputerApplications, 2014, 34(5): 1378-1382.
[3] 罗金满,朱娟.基于视频图像的高速公路车辆检测算法研究[J].计算机工程与设计,2011,32(2):642-645.
LUO Jinman, ZHU Juan. Research on highway vehicle detection algorithms based on video image[J].ComputerEngineeringandDesign, 2011, 32(2): 642-645.
[4] 陈恺.基于移动智能终端的高速公路异常驾驶行为检测技术[D].杭州:浙江大学,2015:24-54.
CHEN Kai.AnomalousOn-FreewayDrivingBehaviorDetectionBasedonSmartMobileDevices[D]. Hangzhou: Zhejiang University, 2015: 24-54.
[5] 周后飞,刘华平,石红星.智能手机车辆异常驾驶行为检测方法[J].智能系统学报,2016,11(3):410-417.
ZHOU Houfei, LIU Huaping, SHI Hongxing. Abnormal driving behavior detection based on the smart phone[J].CAAITransactionsonIntelligentSystems, 2016, 11(3): 410-417.
[6] 赵燕,杜文广,杨勇.基于云计算的移动公路运输监管系统[J].重庆交通大学学报(自然科学版),2014,33(5):120-123.
ZHAO Yan, DU Wenguang, YANG Yong. Mobile highway transporta-
tion monitoring and management system based on cloud computing [J].JournalofChongqingJiaotongUniversity(NaturalScience), 2014, 33(5): 120-123.
[7] MOHAMAD I, ALI M, ISMAIL M. Abnormal driving detection using real time global positioning system data[C]//Proceedingofthe2011IEEEInternationalConferenceonSpaceScienceandCommunica-
tion. U. S. A: IEEE, 2011:1-6.
[8] 杨志勇,马红伟,陈小平.基于模糊逻辑的高速公路事件检测算法仿真研究[J].重庆交通大学学报(自然科学版),2013,32(6):1247-1251.
YANG Zhiyong, MA Hongwei, CHEN Xiaoping. Freeway incident detection algorithm based on fuzzy logic [J].JournalofChongqingJiaotongUniversity(NaturalScience), 2013, 32(6): 1247-1251.
[9] 向前勇,王章瑞,许方华,等.GPS导航数据的提取和坐标转换[J].仪器仪表用户,2009,16(4):70-71.
XIANG Qianyong, WANG Zhangrui, XU Fanghua, et al. Data extracting and coordinate changing in GPS[J].ElectronicInstrumentationCustomer, 2009, 16(4): 70-71.
[10] LU Jian, CHEN Shuyan, WANG Wei, et al. A hybrid model of partial least squares and neural network for traffic incident detection [J].ExpertSystemswithApplications, 2012, 39(5): 4775-4784.
[11] 王立威.人工神经网络隐层神经元数的确定[D].重庆:重庆大学,2012:23-34.
WANG Liwei.DeterminationofNumberofANNs’HiddenLayerNeurons[D]. Chongqing: Chongqing University, 2012: 23-34.
