典型无人机飞行控制系统HEMP效应研究
2018-05-30李进玺程引会郭景海刘逸飞
赵 墨, 吴 伟, 李进玺, 程引会, 马 良, 郭景海, 刘逸飞
(西北核技术研究所, 西安 710024; 强脉冲辐射环境模拟与效应国家重点实验室, 西安 710024)
电子系统的高空核爆电磁脉冲(high altitude electromagnetic pulse,HEMP)易损性研究一直是电磁脉冲效应研究的难点和重点。在信息化时代,无人机在军用和民用领域的重要程度日益提高,但作为高度集成的信息化装备,其内部核心电子系统易受到强电磁脉冲的干扰甚至毁伤[1-3],最终导致无法完成任务。针对无人机面临的电磁威胁,国内学者开展了大量的研究工作,分析了无人机战场应用中所面临的电磁干扰因素和威胁特点,通过分析机体外形、机体复合材料与电磁耦合特性的相互关系,总结了具备抗电磁干扰性能的无人机机体设计思路,开展了有关无人机通信系统的强电磁干扰效应研究工作,获取了通信系统的典型效应现象[4-8]。机体与通信系统等均为无人机的重要组成部分,但飞行控制系统是无人机系统的“心脏”,其工作状态是决定无人机能够完成预定任务的关键,国内已开展的研究中,针对HEMP环境下无人机核心电子学系统干扰与毁伤效应的研究未见报道。本文针对无人机飞行控制系统面临的强电磁威胁,利用半实物仿真模拟,开展了无人机飞行状态下,飞行控制系统的HEMP效应研究,获取了典型效应现象,为下一步开展无人机飞行控制系统HEMP易损性分析奠定了技术基础。
1 试验系统
效应试验中的无人机系统为前置双桨固定翼无人机,总体布局如图1所示。飞行控制系统是一种典型的无人机电子学系统,如图2所示,主要由飞行控制计算机、遥控分系统、遥测分系统、2台发动机系统、舵机分系统(方向舵机、升降舵机、副翼舵机,共5个)和电源系统构成。测试与仿真系统包括飞行仿真系统、舵机数据采集系统和接口响应测量系统,其中飞行仿真系统、舵机数据采集系统和无人机系统共同构成了整个无人机HEMP试验系统。
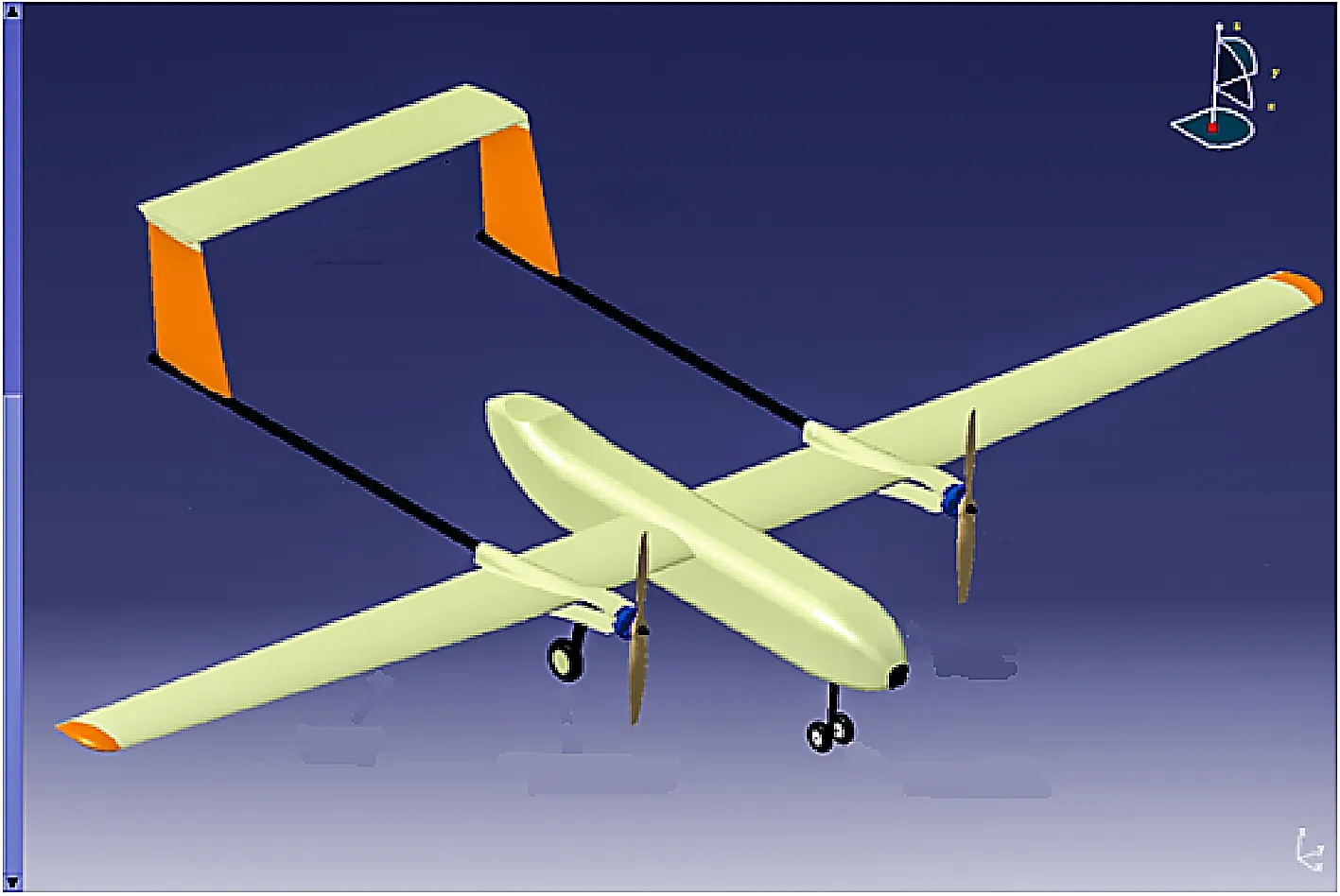
图1 无人机系统总体布局Fig.1 General layout of UAV system

图2 电子学系统构成Fig.2 Composition of electronics system
2 试验结果
利用“春雷号”有界波电磁脉冲模拟器,开展了无人机电子系统辐照试验。试验中,固定无人机方位,辐照电场强度为3~8 kV·m-1,共进行了24次试验,获得了在飞行状态下核电磁脉冲效应现象、规律及主要节点的响应数据,验证了新研制的端口电流探头和光学信号传输系统的工作性能。
将无人机放置在“春雷号”有界波模拟器的试验空间中,机身与地面垂直,测量电子分系统之间线缆连接处的响应电流,试验现场如图3所示。

(a) The EMP simulator
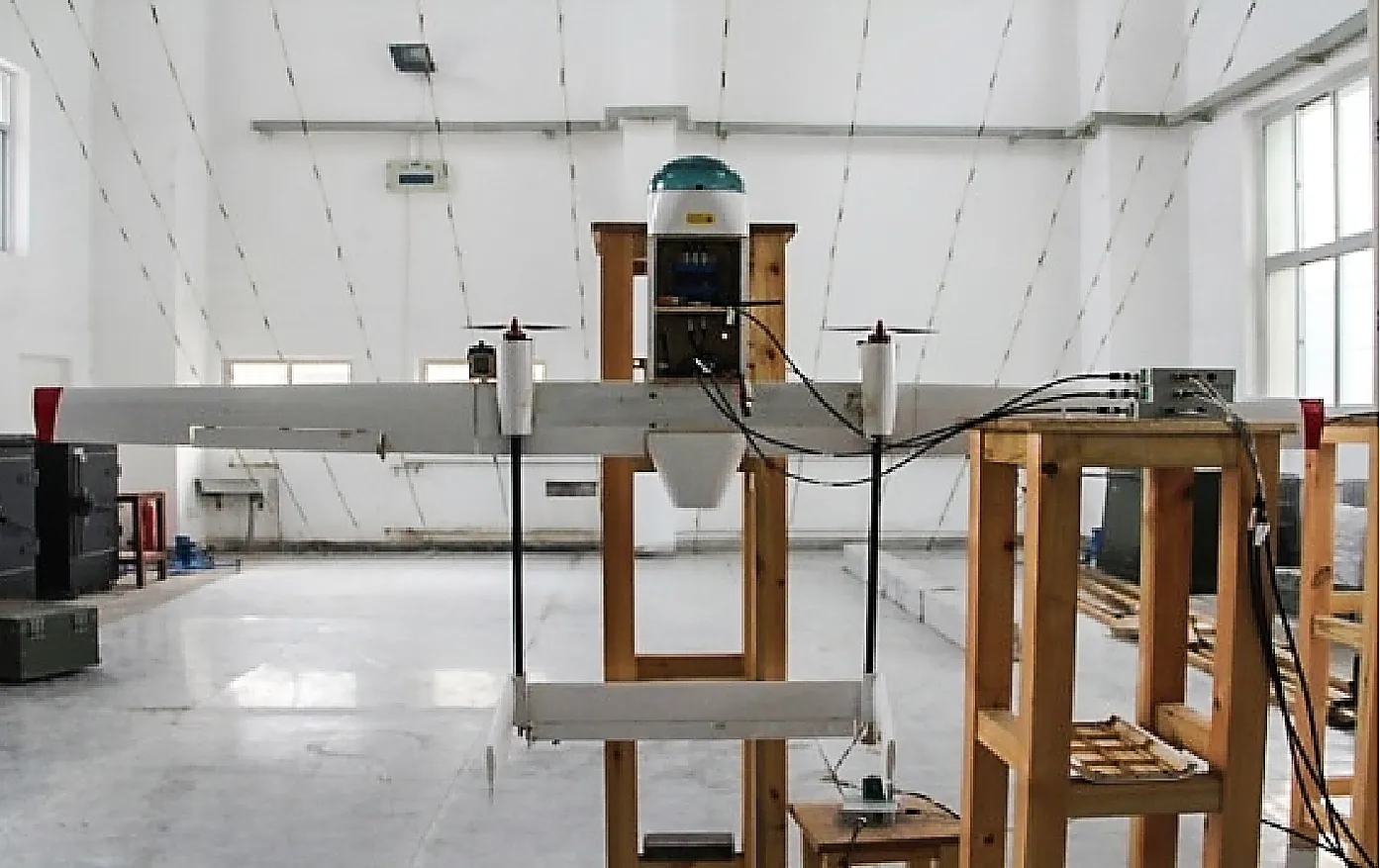
(b) The experiment status
图3无人机试验现场
Fig.3UAVtestingsite
无人机系统试验采用半实物模拟飞行状态,通过地面站与无人机遥测天线发送控制指令,并反馈飞行状态,利用视景系统观察无人机飞行的实时情况,无人机地面站控制面板如图4所示,视景系统界面如图5所示。
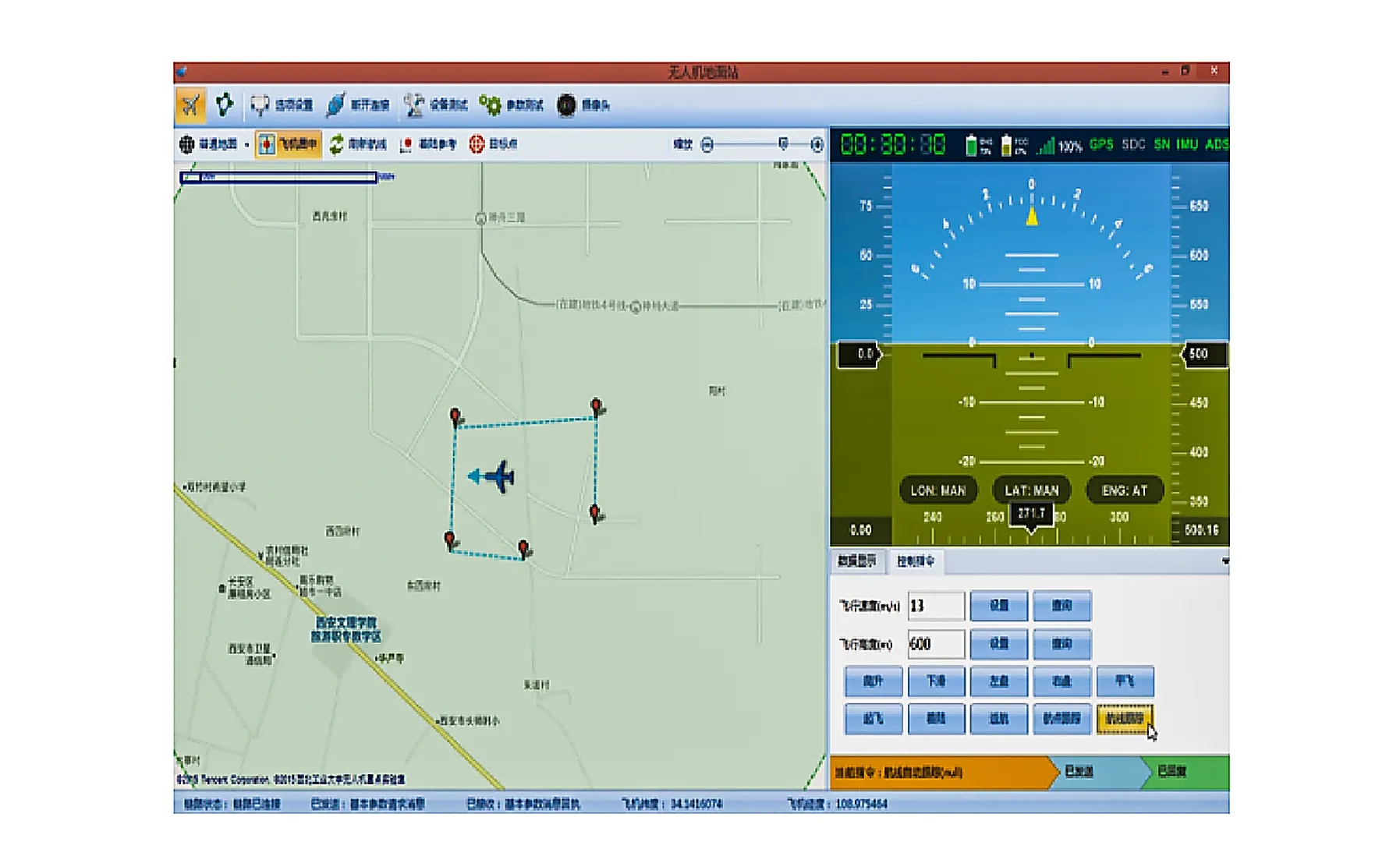
图4 地面站控制面板Fig.4 Control panel of ground control station
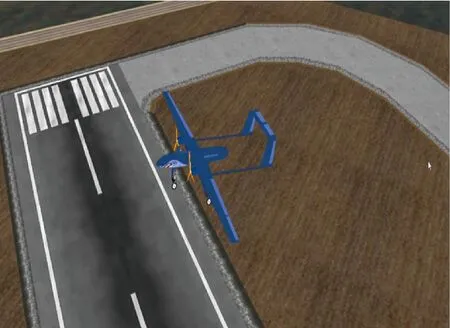
图5 视景系统界面Fig.5 Vision system interface
表1为无人机试验的状态,在较低电场强度下,无人机正常完成预设飞行。当电场强度达到4.5 kV·m-1时,地面站与无人机遥测数据链路传输异常,飞机接受持续错误指令后进入盘旋待命状态,等待进一步指令,由地面站向无人机再次发送控制指令后,可恢复对无人机的控制。当电场强度达到5 kV·m-1时,地面站与无人机遥测数据链路通信中断,地面站无法向无人机发送控制指令,将遥测数据链路全部重启后,可恢复连接并对无人机进行控制。当电场强度达到6.5 kV·m-1时,地面站与无人机遥测数据链路中断,重启遥测数据链路后仍无法建立连接,切换到遥控模式下可人为对无人机进行控制,进行增稳模式(增稳模式为飞控计算机辅助人工对无人机进行控制,以保证飞行的稳定性)遥控控制飞行,表明遥测链路死机,飞控计算机工作正常。当电场强度达到7.5 kV·m-1时,地面站与无人机遥测数据链路通信中断,遥测链路重启仍无法建立连接,切换遥控控制后无法进行增稳控制,仅能进行人工控制,遥控链路死机,飞控计算机死机。当电场强度达到8 kV·m-1时,无人机失控坠落,飞控计算机死机,仿真计算机死机。
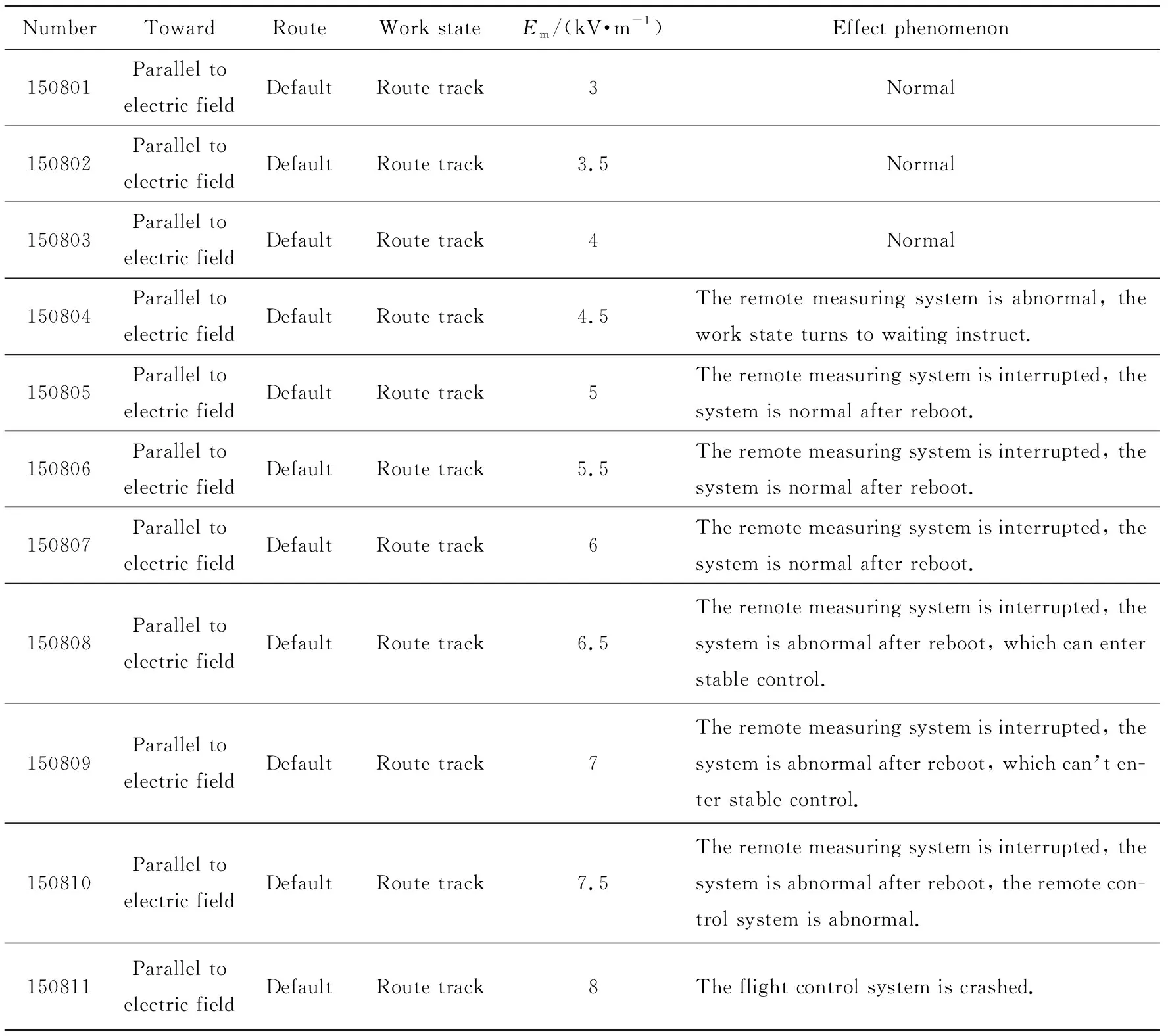
表1 无人机试验状态Tab.1 Testing status of UAV
无人机偏离航线,如图6所示。无人机偏离预设航线时,无人机与地面站遥测通信链路中断,地面站显示界面如图7所示。无人机失控坠落时,视景系统显示界面如图8所示。

图6 无人机偏离航线示意图Fig.6 A UAV deviation from airway

图7 地面站与遥测数据链路中断示意图Fig.7 Interruption of remote measuring data link with ground control station

图8 无人机失控坠落示意图Fig.8 An out-of-control UAV
由上述试验结果可知,无人机的核心电子学系统在遭受强电磁脉冲干扰时,会产生遥测数据链通信故障、遥控数据链路中断、飞控计算机死机等效应现象。遥控与遥测数据链路属于通信链路,其收发天线在强电磁脉冲作用下会产生很高的脉冲电压,脉冲电压通过天线引入到后端信号处理电路,造成电路工作异常。无人机各分系统之间是由数据传输线缆和供电线缆相互连接,各线缆在强电磁脉冲作用下也会产生很高的脉冲电压,通过线缆引入到两端连接的电路,从而干扰电路的正常工作。飞控计算机相当于无人机的“心脏”,所有的核心参数与控制信号的计算都是由飞控计算机完成,因此,飞控计算机在强电磁脉冲作用下无法正常工作,也就意味着无人机将直接失控、坠毁。
3 结论
研制的无人机典型电子学试验系统包含无人机系统、数据采集系统和实时仿真系统,实现了无人机地面模拟飞行状态的半实物仿真功能。利用“春雷号”有界波电磁脉冲模拟器开展的核电磁脉冲效应研究,获得了无人机在飞行状态下的效应现象与初步规律,总结分析了无人机典型电子学系统的薄弱环节,提出了应重点考虑抗电磁脉冲加固的组部件。
[1]盛振华. 电磁场微波技术与天线[M]. 西安: 西安电子科技大学出版社, 1995. (SHENG Zhen-hua. Electromagnetic Field and Microwave Technique and Antenna[M]. Xi’an: Xidian University Press, 1995.)
[2]童诗白, 华成英. 模拟电子技术基础[M]. 北京: 高等教育出版社, 2001. (TONG Shi-bai, HUA Cheng-ying. Fundamentals of Analog Electronic Technique[M]. Beijing: Higher Education Press, 2001.)
[3]杨耆董, 邬国杨, 傅丰林. 电子线路分析基础[M]. 西安: 西北电讯工程学院出版社, 1985. (YANG Qi-dong, WU Guo-yang, FU Feng-lin. Fundamentals of Electronic Circuits[M]. Xi’an: Xidian University Press, 1985.)
[4]吴源维. 复杂电磁环境下无人机的战场应用[J]. 飞航导弹, 2011, 12(1): 30-35. (WU Yuan-wei. The battlefield application of UAV in complex electromagnetic environment[J]. Aerodynamic Missile Journal, 2011, 12(1): 30-35.)
[5]王尔申, 张淑芳, 雷虹, 等. 复合材料无人机电磁兼容设计[J]. 电讯技术, 2011, 51(11): 107-111. (WANG Er-shen, ZHANG Shu-fang, LEI Hong, et al. Electromagnetic compatibility design of a composite material UAV[J]. Telecommunication Engineering, 2011, 51(11): 107-111.)
[6]刘先虎, 范万水, 王备仓. 复杂电磁环境下无人机通信抗干扰问题研究[J]. 军事通讯技术, 2010, 31(3): 86-90. (LIU Xian-hu, FAN Wan-shui, WANG Bei-cang. Anti-jamming of unmanned aerial vehicle communication in complex electromagnetic environment[J]. Journal of Military Communications Technology, 2010, 31(3): 86-90.)
[7]宋祖勋, 俞卞章, 叶烽, 等. 基于环境适应性的无人机电磁仿真研究[J]. 系统仿真学报, 2003, 15(3): 433-436.(SONG Zu-xun, YU Bian-zhang, YE Feng, et al. Research on electromagnetic simulation for UAV focused on environment applicability[J]. Journal of System Simulcation, 2003, 15(3): 433-436.)
[8]宋祖勋, 叶烽. 无人机飞行器的电磁环境效应分析[C]//第24届全国电磁兼容会议, 成都, 2004.(SONG Zu-xun, YE Feng. Analysis of electromagnetic environment effect of UAV[C]//The 24th National Electromagnetic Compatibility Conference, Chengdu, 2004.)