气泵电机橡胶减振垫减振性能的研究
2018-05-29张锦华陆志强
□ 张锦华 □ 陆志强
同济大学机械与能源工程学院 上海201804
1 研究背景
振动往往带来很多问题。对于气泵产品,电机的振动会通过减振软垫传递到产品外壳,如果减振效果不好,会导致产品外壳和地面摩擦,引起噪声;同时也会引起装配在产品外壳上的其它零部件因疲劳而过早松脱等一系列问题。
橡胶作为优秀的减振材料,在工业各个领域有着广泛的应用。橡胶减振垫的特点是既有高弹性,又有高黏性。橡胶的弹性是由其卷曲分子结构的变化而产生,橡胶分子间的相互作用会妨碍分子链的运动,从而表现出黏性阻尼的特点。橡胶的这种卷曲的长链分子结构,以及分子间存在较弱的次级力,使橡胶材料呈现出独特的黏弹性能,因而具有良好的减振、隔声和缓冲性能。橡胶的滞后、阻尼及能进行可逆大变形的特点,使其被广泛应用于各个领域的减振[1]。
用于户内外气泵的橡胶减振垫目前大多为橡胶与金属复合制品,由于气泵中的电机质量较轻,振动频率较高,因此采用静态承载能力较差但柔性好、具有一定阻尼的纯橡胶异形减振软垫来进行减振[2-4]。
橡胶减振软垫的减振能力与软垫的刚度有关,但在实际使用过程中,刚度很难被精确地测量。邵氏硬度和刚度有一定的相关性,相较于刚度测量设备,邵氏硬度测量设备在企业中应用得非常广泛[5-6]。笔者主要研究橡胶软垫的硬度和直径对减振能力的影响,制作了不同硬度和尺寸的橡胶软垫,并开发了用于测量高频率振动位移的试验设备,通过对安装了不同硬度和直径减振软垫的气泵进行振幅测量,应用试验设计(DOE)的响应曲面设计方法[7-8],分析测量数据并模拟出橡胶减振软垫硬度和直径与振幅之间的函数关系,找到能够将气泵外壳的振动降低到比较合理范围的方案[9],并通过试验进行验证。
2 试验准备
为了准确、实时地测量高频率振动气泵的振幅,采用了一套采样率为10 000次/s的高精度位移测量系统,高精度实时位移测量装置如图1所示。
气泵电机的振动通过橡胶软垫传递到气泵外壳,电机的振动主要是由电机内部作直线运动的运动机构产生周期力而产生。

▲图1 高精度实时位移测量装置
振动会引起气泵移动,尽量排除外界对气泵移动的干扰是准确测量气泵振动位移的关键要素之一。由于气泵主要移动方向、主要振动方向与气泵电机内部往复直线运动方向一致,因此在测量装置中设计了光滑的轨道系统,与气泵电机内部的往复直线运动方向保持一致。气泵需要紧紧地固定在导轨滑块上,不允许有晃动,导轨和滑块之间也不可以有间隙,以免晃动引起其它误差。同时,调整系统确保导轨处于水平位置。系统上固定传感器的挡板要有一定的刚度并与导轨相互垂直。气泵固定在轨道的滑块上,由于轨道非常光滑,因此气泵可以在轨道上自由滑动,这样就可以在很大程度上排除外界干扰对气泵移动的影响[10]。
通过四个位移传感器的测量,获得气泵的初始位置作为各自的零点。当气泵振动时,四个位移传感器同时记录气泵的实时位移值。1号传感器和2号传感器的位移值包含气泵振动的实时摆幅和气泵移动的实时位移,但需要调整系统,以确保两个位移传感器记录的实时位移是一致的,只是方向相反。3号传感器和4号传感器实时记录轨道滑块的位移,即气泵实时移动的距离,同样3号传感器和4号传感器记录的气泵实时位移值也要一致。由此,可获得振动的振幅F(x):

式中:x1、x2、x3、x4分别为1号、2号、3号和4号传感器的测量值。
经过测量,气泵外壳的振动振幅为0.5 mm,其振动的函数如图2所示。

▲图2 外壳振动的函数图像
3 试验结果分析与讨论
3.1 DOE的响应曲面设计方法
DOE响应曲面设计方法分为两个阶段。第一阶段是因子设计和分析阶段,目的是找到包含有最优方案的参数范围。通过试验不同硬度、直径组合的橡胶软垫样品,模拟出当前参数组合与气泵振动振幅的关系模型函数,通过检查该模型函数的方差分析结果和弯曲模量,判定最优参数组合是否包含在当前的参数范围内。如果检查结果发现最优方案不在当前参数范围内,则需不断调整样品参数,直到最优参数组合包含在第一阶段的试验参数范围内。
第二阶段是曲面设计阶段,目的是在第一阶段试验的基础上,进行下一步的轴点试验,完成曲面构图和模拟出最终模型函数,找到最优的参数组合。其中轴点位置ɑ因子的取值仅与因子个数有关,当因子个数为2时,轴点位置ɑ因子的取值为1.414。轴点偏移量的计算式为:

式中:D(c,l)表示因子水平中心点到因子各水平点的差,c为因子高水平的取值,l为因子低水平的取值。
3.2 第一阶段的试验结果与分析
气泵橡胶减振软垫的硬度取两个水平,分别为HA硬度40和HA硬度70,直径取两个水平,分别为4 mm和6 mm,以及在两个水平的均值点进行三次试验,得到安装了不同硬度、直径减振软垫产品的振幅,见表1。

表1 安装了不同硬度、直径减振软垫产品的振幅
将试验结果输入到Minitab软件DOE分析功能中的因子设计和分析模块,分别完成橡胶软垫硬度和直径对气泵振动振幅影响的分析、硬度与直径之间的交互作用分析、模型函数的方差分析及弯曲分析。
分析结果显示:电机橡胶软垫的减振能力与硬度有关,与直径有关,以及与硬度和直径两者的交互作用有关,橡胶软垫硬度和直径与产品振幅的相关程度如图3所示,模型函数方差分析及弯曲分析结果见表2。模型函数中线性、硬度、直径、交互作用、硬度×直径等各项的概率p值全部大于0.05,可知模型函数的各项均不显著;模型函数弯曲的p值等于0,小于0.05,可知模型函数有显著的弯曲。因此可以得到当前的模型函数有明显的失拟和弯曲,由此判定该模型函数无效。同时由于模型函数有明显的弯曲,可以得到硬度、直径最优方案组合已包含在当前的参数范围内,因此直接进行第二阶段的试验,完成曲面构图和模拟最终模型函数。

▲图3 橡胶软垫硬度和直径与产品振幅的相关程度

表2 橡胶软垫硬度、直径DOE因子分析所得模型函数的方差分析及弯曲分析结果
3.3 第二阶段的试验结果与分析
第二阶段的试验是在第一阶段试验的基础上,分别增加(76.21 HA,5 mm),(33.79 HA,5 mm),(55 HA,3.586 mm),(55 HA,6.414 mm)四个轴点的试验。得到安装了位于轴点位置的不同硬度、直径减振软垫产品的振幅,见表3。

表3 安装了位于轴点位置的不同硬度、直径减振软垫产品的振幅
将轴点的试验结果和第一阶段的试验结果一并输入Minitab软件DOE分析功能中的曲面设计模块进行分析,完成曲面构图和模拟最终模型函数。增加轴点试验后模拟出的模型函数方差分析结果,见表4。
模型函数方差分析结果显示,模型、线性、硬度、直径、平方、硬度×硬度、直径×直径的p值全部小于0.05,可以得到模型函数中的各项显著;失拟的p值为0.46,不显著。可以得到模型函数没有明显的失拟,因此模型函数是有效的。

表4 模型函数方差分析结果
增加轴点试验后模拟出的模型函数正态概率图如图4所示,残差分析结果显示,残差分布没有明显异常,该模型函数没有异常。
振幅与减振橡胶的硬度、直径的函数关系为:

式中:A为硬度;B为直径。

▲图4 增加轴点试验后模拟出的模型函数的正态概率图
根据函数方程可以推算出当橡胶软垫的硬度取56.5 HA,直径取5.07 mm时,产品外壳的振动达到最小,取值为0.134 mm。
增加轴点试验后模拟出的模型函数曲面如图5所示。
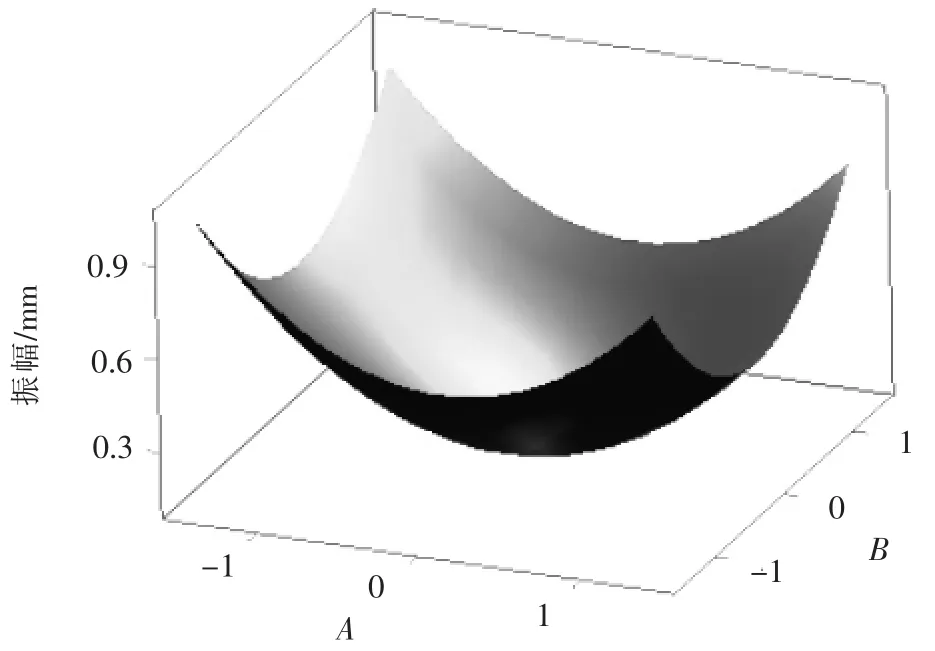
▲图5 增加轴点试验后模拟出的模型函数曲面图
图5中,A因子表示硬度,-1水平表示取值40 HA,1水平表示取值70 HA;B因子表示直径,-1水平表示取值4 mm,1水平表示取值6 mm。
3.4 试验结果的验证
由于橡胶的硬度很难精确地调整,因此分别取HA硬度为56、57、55,直径为5.1 mm的三种橡胶软垫样品进行试验验证,得到安装验证样品的气泵的振幅,见表5。

表5 安装了验证样品产品的振幅
从表5可知,安装了验证样品的气泵振动振幅为0.15 mm左右,相比于初始气泵0.5 mm的振动振幅有较大的改进。
4 总结
通过DOE响应曲面设计,发现调整后的橡胶软垫具有更优的减振能力。
研究结论为橡胶软垫的减振能力和橡胶硬度、直径呈曲面关系,在HA硬度取56左右,直径取5.1 mm时,研究对象的减振能力达到了最优值。
