某轻卡定速巡航不稳原因探索和改进
2018-05-26曹超班艳琴张建强郭忠蕊
曹超,班艳琴,张建强,郭忠蕊
(安徽江淮汽车集团股份有限公司,安徽 合肥 230022)
前言
定速巡航系统(CRUISE CONTROL SYSTEM) 缩写为CCS,又称为定速巡航行驶装置,自动驾驶系统等。其作用是:按司机要求的速度合开关之后,不用踩油门踏板就自动地保持车速,使车辆以固定的速度行驶。定速巡航原理主要是通过巡航控制组件读取车速传感器发来的脉冲信号与设定的速度进行比较,通过精准的电子计算发出指令,保证车辆在设定速度下的最精准供油量。本文主要探索某轻卡定速巡航不稳的原因及改进措施。
1 故障问题回顾
1.1 问题背景
某轻卡车型在市场反馈巡航车速不稳定,主要表现为:启动巡航,车速设定在100km/h时,仪表盘读数不变,但驾驶员能感受到车辆不时前窜和减速,经过诊断仪检测,得知在该状态下,实际车速在97km/h~100km/h之间频繁波动。
1.2 问题确认
在定远试验场高环跑道对未出厂的该车进行巡航路试(变速箱档位为最高档):仪表指针在 100km/h时开启巡航后,仪表指针在100-111不停摆动,车辆有抖动感;且真实车速为 100km/h时,发动机接收到的车速信号在 93.5-104 km/h之间不断变化,误差范围达10.5%,大于发动机对车速信号 2%的误差要求,发动机需不断的对油门进行调整。确认存在两个问题:
1)车速表指针上下浮动较大。
2)驾驶员和乘员能感受到车辆前后不停窜动的抖动感。
2 原因分析
2.1 定速巡航控制原理
定速巡航系统是经过采集车速信号,计算分析并对比设定车速,通过控制电子油门传感器输出的信号,控制节气门开启大小的调整,来实现对车辆速度的控制。定速巡航功能开启后,定速巡航模块会通过电子油门传感器输出的信号,精确计算为保持当前定速巡航速度,需要控制节气门开启的角度大小,从而使得气、油精确配合,来达到定速巡航所设定的行驶速度。
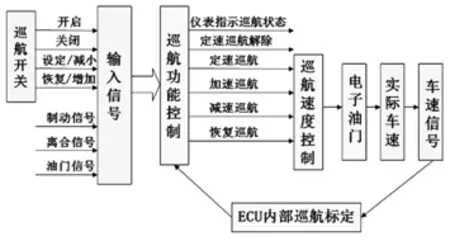
图1 巡航控制原理图
车速传感器一般位于变速箱上,检测输出轴上的转速来获取车速信号,车速信号经过频率转化模块降频后发到仪表中,仪表一方面自己使用,另一方面被降频后的车速信号发送到CAN总线,供ECU使用,ECU分析对比设定车速,实现对电子油门的精确控制。
2.2 发动机厂家相关要求
目前获取了康明斯、迈思福、锡柴、潍柴发动机关于巡航的相关要求,对比说明如下:
1)ECU电控原理图要求,不同厂家针脚定义位置不同,对应开关信号要求基本相同;
2)巡航控制逻辑:最低巡航车速设定不同,增速减速步进速度设定不同,退出逻辑基本相同;
3)发动机ECU对整车提供的车速信号精度要求不同。

图2 发动机车速精度要求
2.3 整车车速信号精度测试
该车型匹配的车速里程表传感器,由变速箱输出轴通过蜗轮蜗杆机构机械驱动传感器输入轴,每转输出8个脉冲信号。在高环采集的匹配此传感器的一组整车CAN车速信号。
最高车速信号:96.4km/h,最低车速信号:91.1km/h,基准车速94,误差5.6%。
车辆巡航时发动机接收到的车速信号不能满足±1%的精度要求,故可初步判断车速信号精度为影响定速巡航稳定性的关键要素。
3 改进方案
3.1 提高现有传感器精度
3.1.1 现传感器的信号精度
要求厂家对现供货传感器和改进的传感器进行台架测试,误差波动范围较大(3%-29%),不能满足要求。
3.1.2 寻找新的传感器供应商
寻找了国内另一电器厂家生产的同类传感器,并提供了3个样件,经高环测试 CAN线整车车速信号误差分别为:1.7%、2.7%、2.3%。
其中误差为 1.7%的传感器:基准车速 76km/h,最搞车速76.6 km/h,最低车速75.3 km/h,误差1.7%,精度为+0.8%和-0.9%,满足发动机的巡航要求。将传感器更换到该故障车型上,在定远路试巡航时车速指针平稳,车辆无抖动现象。
提高现结构车速传感器精度到误差允许范围内,巡航问题可解决。
3.2 新型传感器
3.2.1 非接触式霍尔传感器
非接触式霍尔传感器结构是经过电线束和装在变速器后轴承盖上的电子里程表传感器连接在一起,我们称这种电子里程表传感器为非接触式霍尔里程表传感器。
传感器探头与里程表转子之间有一定的间隙,这个间隙一般控制在 1.4±0.6mm。当汽车行驶时,里程表靶轮与变速器输出主轴一起转动,当里程表靶轮的某一个齿转动到传感器探头对应的位置时,探头中的敏感器件受到里程表转子磁场作用输出一个低电平,当里程表转子的齿没有与传感器探头对准,探头中的敏感器件没有受到磁场作用而输出高电平。这样变速器输出轴每转动一周,里程表传感器就有8 个方波脉冲信号输出,经连接线束传给车速里程表。
3.2.2 非接触式霍尔传感器工作原理
霍尔式传感器是一种磁电式传感器,它是利用霍尔元件基于霍尔效府原理而将被测量转换成电动势输出的一种传感器。由于霍尔元件在静止状态下具有感受磁场的独特能力,并且具有结构简单、休积小、噪声小、频率范围宽、动态范围大以及寿命长等特点,因此获得了广泛应用。金属或半导体薄片置于磁场中,当有电流流过时,在垂直于电流和磁场的方向上将产生电动势,这种物理现象称为霍尔效应。

图3 霍尔传感器
利用霍尔原理将接收到最大或最小磁场强度的点作为输出转换点,依此来开、关输出引脚的电平量。当靶轮的齿凸与齿凹的位置对着传感器感应区时,穿过霍尔元件的磁场强度会发生变化。
3.2.3 非接触式霍尔传感器验证
(1)在高环跑道进行精度测试:80(仪表指示)巡航,仪表发送到CAN上的车速信号如下:最高78.1,最低77.4,真实车速77.7,误差0.9%,可满足要求。
(2)通过将接触式里程表传感器更换为新型非接触式霍尔传感器,请标定部对该车巡航的驾驶性进行评价,评价结果如下:
①进入巡航、退出巡航以及加减速等各巡航功能正常。
②巡航车速稳定性:60km/h,80km/h,100km/h几种车速情况下对车辆巡航车速稳定性进行了评价。以上巡航时车辆通过了平路、坡道等路段,各种路况下车辆能以稳定的车速进行巡航,主观感受和观察仪表均察觉不到车速的明显变化,主观感受良好。在通过上坡和下坡的过程中,车速稳定,从仪表上未见车速的变化,车速的波动值在±1.5~2km/h以内(主观判断),该车的巡航车速稳定性良好(评价时车辆空载)。
小结:匹配非接触式霍尔传感器可以解决巡航问题。
3.2.4 技术对比
对比于接触式里程表传感器,霍尔传感器主要有以下特点:
(1)接触式传感器在早期的车上应用广泛,但是由于其存在传动部件,机械磨损难免,变速箱输出轴的轴向窜动可能导致蜗轮或蜗杆的断裂,这种结构性的缺陷导致其故障率较高,且维修不便。同时其刚性配合,轴心偏差有可能导致变速箱漏油,由于轴向跳动,输出信号也会出现缺失和不稳定。
(2)非接触式传感器由于零件少,去除了机械传动机构,故障点减少,维修方便,是车速传感器的发展方向,目前正逐步大量应用。
(3)随着国四、国五的实施,各种新技术(如自适应巡航、主动紧急制动等)的不断推广应用,对高精度车速信号的需求越来越严格。
(4)霍尔传感器价格高约30元。
4 结束语
通过原因分析,实车验证充分说明了里程表传感器的精度对定速巡航稳定性的重要影响,提高里程表传感器精度可有效解决该轻型卡车巡航时车速不稳的故障。而提高里程表传感器精度可从以下两个角度来实现:
1)采用现有传感器结构,寻找新的供应商和传感器标杆件,提高车速里程表传感器的精度,使整车车速信号精度控制在发动机要求范围以内,变速箱结构不需要作调整。
2)匹配非接触式霍尔传感器,变速箱取消蜗轮蜗杆,匹配靶轮,变速箱后盖需重新开模,以保证霍尔传感器的安装。
参考文献
[1] 李晓萍著.汽车定速巡航系统研究与实现[J].科技创新导报,2009(27).
[2] 代玉军.定速巡航系统功能介绍及注意事项[J].科技视界,2013(24).
[3] 路国庆.脉冲检测方法的霍尔传感器在里程表中的应用[J].机械设计与制造.2009(01).
[4] 尚峰斌.车速里程表的工作原理及优缺点[J].汽车实用技术.2012(10).
[5] 郑发农.电子式车速里程表[J].自动化仪表.2000(06).
[6] 段志敏.德龙车系车速信号的产生与应用原理[J].汽车电器.2014(09).
[7] 徐旭.商用车车速里程表传感器与仪表的匹配[J].汽车实用技术.2013(09).