电控指夹式排种器实训装置的研制与应用
2018-05-21唐明祥丁雪梅唐心龙马中威董桂军
唐明祥, 丁雪梅, 唐心龙, 马中威, 董桂军
(吉林大学 a. 植物科学学院;b. 动物科学学院;c. 农业实验基地,长春130062)
0 引 言
播种作业是农业生产过程中的关键环节,而机械化播种相对人工作业优势显著,具有作业准确、深浅一致,而且效率高、速度快,同时也为田间管理作业创造良好的条件,所以播种机是现代农业生产中的重要机械之一。播种机的种类繁多,归纳起来不外乎是它们的基本结构大同小异,主要是它们的核心工作部件“排种器”不同[1-5]。
排种器作为播种机的核心工作部件,其种类很多,指夹式排种器就是其中的一种,主要用于玉米精量播种,电控排种器也是未来的发展趋势,而电控指夹式排种器就是其中之一,它是将自动控制技术应用其中的先进排种器,其结构和工作原理以及使用调整比较复杂[6-8],尤其是对于高校涉农非机械专业的学生学习掌握这样的先进播种机比较困难,而排种器又是播种机械中讲授的重点难点,对于配备电控指夹式排种器的播种机,学生对播种量的检查调整更是难于理解掌握[9-12]。基于这一现状,本文研制了电控指夹式排种器实训装置,并在我院农学、植保、资环、园艺、生技(植)等5个涉农非机械专业机械课程的实验教学中进行了多次应用,同时在学校的开放性创新实验项目中也进行了实践应用,解决了学生对播种机部分难于理解掌握的现状,提高了学生上课的积极性与主动性,课堂效率显著提高。
1 实训装置的研制
1.1 实训装置的基本结构
电控指夹式排种器实训装置如图1所示,主要由播种单体、自动清种器、行走装置和控制器等组成。其中播种单体由指夹式排种器9、驱动电动机10、速度传感器4等组成;自动清种器由风机5、电动机11、撮子8等组成;行走装置由轨道3、电动机12、行走轮15等组成;控制器由遥控器、播种控制器2和行走控制器13组成。
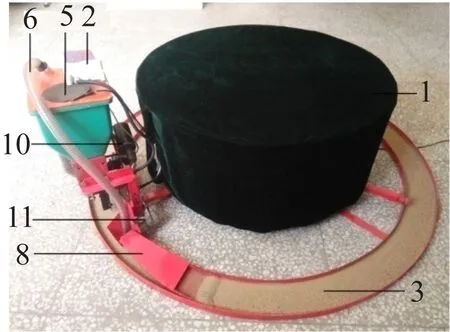
1-装饰台面;2-播种控制器;3-环形轨道;4-行走速度传感器;5-内置风机;6-吸种管;7- 种子箱;8-撮子;9-指夹式排种器;10-排种器驱动电动机;11-自动清种器电动机;12-行走装置驱动电动机;13-行走控制器;14-电线通过装置;15-行走轮
图1 电控指夹式排种器的结构
1.2 实训装置的控制
图2所示为实训装置的工作流程图,遥控器控制行走控制器和自动清种器,其中,遥控器通过控制行走控制器来实现播种单体在轨道上行走的快慢,实现自动清种器实时清种,如果非遥控器控制自动清种器就由行走控制器内预置程序自动控制清种。

图2 实训装置的工作流程图
1.3 实训装置的基本工作原理
如图1所示,播种控制器2和行走控制器13的开关都处于开的位置,插上电源,按遥控器中的C键,行走装置的电动机12开始工作,并驱动行走轮转动在环形轨道上行走,播种单体也随之在环形轨道上行走,指夹式排种器在电动机10的驱动下以一定的株距在环形轨道的沙子表面上播种,同时,自动清种器将播下的种子收入撮子8,约转1.5圈时,撮子8在电动机11的带动下升起,将种子送入撮子后端,风机5启动将种子吸入种子箱7,以使种子循环利用,如果按遥控器的D键,则实时清种,以达到循环播种演示。
1.4 实训装置的主要特色
(1) 实训装置完全能模拟排种器在田间作业时的工作情况,直观方便;
(2) 以圆形轨道来代替田间播种的直线轨迹,同时利用自动清种器实现种子循环利用;
(3) 实训装置的播种演示利用遥控器控制,操作简单,随时可操作。
2 实训装置的实验及结果分析
2.1 实验结果
设定驱动轮直径,然后利用实训装置测定不同理论株距(在播种控制器上进行设定)下的实测株距,测得的数据形成柱状图,如图3所示。

图3 理论株距与实测株距关系的柱状图
由图3可见,当驱动轮直径为85 cm时,实测株距接近理论株距,为了更准确,预设株距为16.67、20.00 cm,分别测试驱动轮直径为83、84、85、86 cm时所对应的实测株距,填入表1,即微调驱动轮直径,进一步观察发现,仍然是驱动轮直径为85 cm时的实测株距最接近理论株距。

表1 微调驱动轮直径实测株距
根据图3分析得出如下结论:① 当驱动轮直径一定时,实测株距随预设株距增大而增大;② 当预设株距一定时,实测株距随驱动轮直径增大而减小;③ 当驱动轮直径为85 cm时,实测株距最接近理论株距(预设株距),即驱动轮直径为85 cm正是调试找到的最佳数据;
2.2 误差分析
实验数据具有一定误差,主要原因是:① 电控指夹式排种器实训装置排种口与沙子平面距离较高,种子跳动造成一定误差;② 播种轨迹为环形轨道式,对实测株距也有一定影响;③ 测量点的选择有一定影响。
3 教学应用
实训装置研制完成之后,在本科生的实验教学中进行了应用,涉及13个期班,603人次,3 618人·学时,如表2所示。今年首次在开放性创新实验项目中进行了应用,涉及学生16人,2个学院,4个专业,如表3所示,实训装置的成功应用充分体现了研制该装置的目的。

表2 本科生实验教学
实训装置在本科教学和开放性创新实验项目中应用后,对学生的反馈进行了归纳总结,主要有:
(1) 通过参与本实验,提高了我们的动手能力与理解能力,本实验操作性较强,通过自己的动手操作,可以学习了解有关电控式精量播种机的基本结构与工作原理,这深深地吸引了我们,并对该方面产生了浓厚的兴趣,都说兴趣是最好的老师,自然对学习这方面的知识也有所促进。

表3 开放性创新实验项目
(2) 通过该实训装置的演示与实际操作,可以直观地观察指夹式排种器的工作过程,也可以在该装置上模拟株距的调整,同时还可以清晰地观察到指夹式排种器的结构,我们对于机械方面没有太深入的了解,该装置使我们在学习播种机的结构与工作原理方面的知识以及动手调试时,得到了很多的帮助。再加上老师细心地讲解,让我们在理解消化这部分知识时如鱼得水,既提高了我们的实践动手能力,又能帮助我们理解掌握播种机的各个知识点。
通过电控指夹式排种器实训装置在实践教学中的应用,增强了学生的实验技能,激发了学生的创新思维、培养了学生的科研意识。同学们在实际操作中,积极探索,主动交流与讨论,相互学习,相互促进,也是理论与实践相结合的体现,这一过程有利于提高学生的综合素质和实践技能[13-15]。
4 结 语
研制的电控指夹式排种器实训装置克服了播种机播种量的调试受时间、季节、气候、白天、晚上等因素的限制,该装置完全能模拟排种器在田间作业时的工作情况,直观、方便,排种器的播种株距(或者叫播种量)通过速度传感器与排种器的行走速度相匹配,也就是说,当播种量一定的情况下,播种量随排种器前进速度的变化而不变;实训装置通过在本科实验教学和开放性创新实验项目中的应用,提高了课堂效率、锻炼了学生的实践动手能力,同时还能够对学生起到理论联系实际的作用。
参考文献(References):
[1] 李剑峰, 高晓阳. 播种机速度自动检测的硬件及软件设计[J]. 甘肃农业大学学报, 2007(1):92-95.
[2] 张春岭, 吴 荣, 陈黎卿. 电控玉米排种系统设计与试验[J]. 农业机械学报, 2017(2):51-59.
[3] 史 嵩,张东兴, 杨 丽, 等. 气压组合孔式玉米精量排种器设计与试验[J]. 农业工程学报, 2014, 30(5): 10-18.
[4] 唐明祥, 梁天也. 谈2BJG-2型精密耕播通用机的改装及使用效果[J]. 农机使用与维修, 2014(9):42-44.
[5] 石林榕, 吴建民, 孙 伟, 等. 基于离散单元法的水平圆盘式精量排种器排种仿真试验[J]. 农业工程学报, 2014(8):40-48.
[6] 刘文忠, 赵满全, 王文明, 等. 气吸式排种装置排种性能理论分析与试验[J]. 农业工程学报, 2010(9):133-138.
[7] 孙裕晶, 马成林, 牛序堂, 等. 基于离散元的大豆精密排种过程分析与动态模拟[J]. 农业机械学报, 2006(11):45-48.
[8] 杨 丽, 史 嵩, 崔 涛, 等. 气吸与机械辅助附种结合式玉米精量排种器[J]. 农业机械学报, 2012(S1):48-53.
[9] 张 磊, 赵明冬. 光伏并网发电实训平台研制与应用[J]. 实验技术与管理, 2017(1):109-113.
[10] 黄 思, 杨卫国, 梁棣华, 等. “过程流体机械”本科教学实验装置的研究[J]. 广州化工, 2009(2):204-205, 215.
[11] 邢雪梅. SLJWX-1A型微机保护实训装置在教学中的应用[J]. 工业控制计算机, 2017(3):138-139.
[12] 李剑峰. 播种机排种自动控制系统的研究[D]. 兰州:甘肃农业大学, 2006.
[13] 张润光, 张有林, 韩军岐, 等. 智能气调保鲜实验装置研制与教学应用[J]. 实验技术与管理, 2015(11):99-101, 104.
[14] 魏 弟, 王会君, 张 桂, 等. 生物化学电泳实验染、脱色装置的研制及教学应用[J]. 实验技术与管理, 2005(11):60-63.
[15] 易 黎. 加强实验室开放管理培养学生实践创新能力[J]. 实验技术与管理, 2014(7):223-225.
