高速拖曳水池轨道建设工程若干问题探讨
2018-05-21魏方以蒋志鹏贡建国
魏方以,徐 昊,蒋志鹏,贡建国
(上海交通大学海洋工程国家重点实验室,上海200240)
0 引言
在高速拖曳水池建设过程中,轨道建设是极为关键的核心工程,其直接影响到高速拖车的速度稳定性与精度,从而影响模型试验性能数据的准确性和重复性[1]。拖曳水池轨道与传统铁轨在结构特点、荷载特点与工作特点等方面存在明显区别,通常由主轨和副轨组成,每根轨道为整根无缝焊接,并严格保证轨道的水平度、直线度和平行度,控制水池池壁不均匀沉降变形对轨道的影响,以确保模型拖曳试验精度。
随着近年来国内新建拖曳水池不断增多,整体趋势也呈现投入多、规模大、精度高、功能广等多元特征。但如何提高其轨道建设的质量、控制加工与安装精度,从而满足未来各类模型试验的科研需求,是业内尤为关注的问题。本文以上海交通大学拖曳水池轨道建设为例,总结分析了轨道设计加工与安装、轨道测量与调整、轨道安装精度分析等若干工程问题,并针对相关技术问题探讨可行对策。上海交通大学拖曳水池轨道如图1所示。

图1 上海交通大学拖曳水池轨道
1 轨道的设计、加工与安装
上海交通大学多功能拖曳水池整体尺度300 m×16 m×7.5 m,拖车最大拖曳速度达10 m/s,轨道由中国航空救生研究所(610所)负责建造,其技术指标如下[2]:
轨道总长约300 m,轨距16.6 m;
相对于水平面,轨道顶面各点水平度偏差小于±0.1 mm,每米偏差小于±0.05 mm;
每根轨道直线度偏差小于±0.2 mm,每米偏差小于±0.1 mm;
轨道基座的间距不小于500 mm,轨道在各基座处沿垂向可调距离不小于20 mm,沿水平向可调距离不小于±5 mm.
因此,高精度技术指标为轨道系统的设计、加工、安装、调试和维护等工作带来了重大的技术难度与挑战。
1.1轨道设计与加工
钢轨材质选用U71Mn,经质检局对金相组织、硬度、冲击功、抗拉强度、屈服强度、断后伸长率等项目检验合格。根据轨道技术指标,除满足拖车载荷要求外,轨道设计时应考虑两个方向的调节余量,满足双向调节和锁定,从而克服由于水池地基的变形、内部应力与外部载荷变化所引起的轨道基础沉降及变形,如图2所示。710所胡志仁等针对拖曳水池高精度轨道的调节锁紧问题,对轨道调节范围、轨道直线度和水平度调节机构以及调节支座的固定3个方面进行了研究[3]。轨道六个面进行精密预加工过程中,需要对加工质量严格控制管理,认真制定钢轨加工尺寸检测记录表,避免出现轨道预加工后轨面粗糙度超标,影响轨道精确调整,导致拖车运行速度不稳定,水平导轮卡轨等现象。
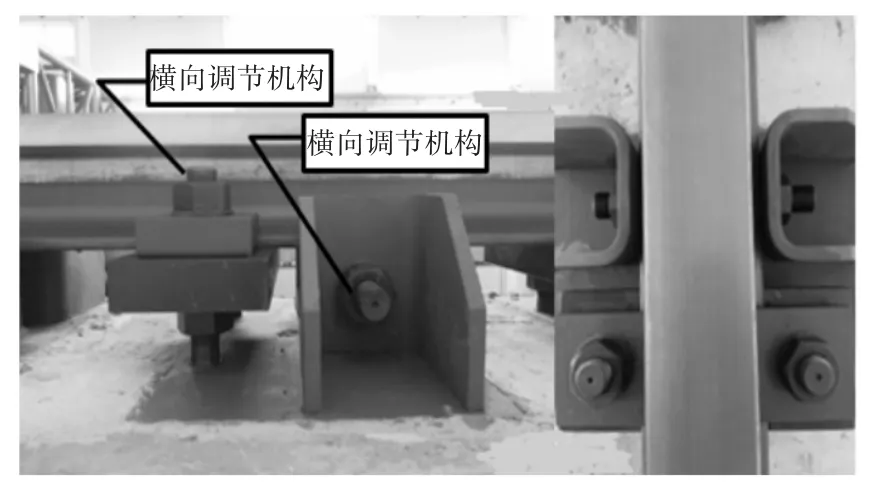
图2 轨道布置图
轨道焊接轨头精密预加工过程中,需提前制定可行的轨道焊接施工方案,完成轨道现场焊接试验,详细记录每个试验焊接头的正火参数、检测精度、超声波探伤及落锤试验情况,最终记录轨道正式焊接、正火相关数据,并检测滑轨固有频率。
1.2轨道的安装
轨道安装分为预埋件铺设与浇筑、轨道铺设两部分。土建施工时应预留预埋孔或槽,防止在扣件铺设与浇筑时出现尺寸偏差。在保证设计水位前提下,开始铺设预埋件,预埋件的定位采用激光跟踪仪,并保持对池壁的沉降与变形监测,以便预埋件浇筑固定后满足轨道调整要求,施工流程如图3所示。

图3 轨道预埋件施工流程图
轨道焊接后,由五工位精铣机床加工,加工精度同轨道预加工要求一致,逐步推进完成300 m轨长。轨道安装时检测与调整所采用的测量仪器必须达到高于0.05 mm的测量精度,包括Leica TM30和FARO激光跟踪仪等,如图4.
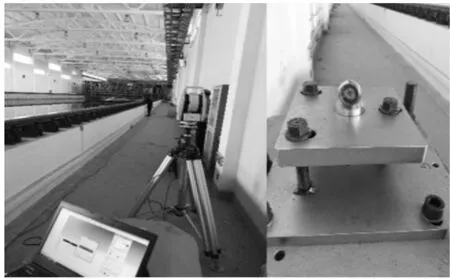
图4 Leica激光跟踪仪及靶球
2 轨道的测量与调整
通常,拖曳水池轨道测量采用传统水准槽[4-5]、轴线定位[6]、USMN[7]、常规测量[8]等测量方法。我校水池采用建立基于GPS精密高程测量技术的永久独立基准线方法,沿水池纵向单侧布置12个基准桩,跨度约306 m.与传统水准槽测量方法相比,独立基准线测量方法能更好地控制高精度轨道的测量和调整精度,有力保证了轨道的安装、调整与维护。此外,也有一些水池基准点间距在水池两端为18 m,中间相邻基准桩距离约30 m,按照基准点的直线度要求,测量精度为±0.2 mm+0.5 ppm,安装精度为±2 mm,全长相对误差±0.5 mm.采用Leica TM30和Trimble水准仪完成了基准点强制归心装置的安装放样及精密测量工作,点位放样精度达到3 mm,高程放样精度达到1 mm.对轨道检测与调整采用的设备包括Leica TM30和FARO激光跟踪仪和Trimble水准仪。采用Leica TM30全站仪进行了基准桩的安装放样,定义当地坐标系,1号点为坐标系原点,x轴与滑轨平行,基本指东,y轴指南,z轴垂直向上,构成左手坐标系。基准桩个数共计12个,点位分布及坐标系如图5所示。

图5 基准桩点位分布及坐标系
为使测量结果更精确,需对基准桩进行多次复测,同时相对上次安装位置进行微调,并利用激光跟踪仪测量与全站仪测量进行互相检核。
3 轨道精度分析
拖车系统的稳定性对模型试验至关重要,决定拖车运动性能的因素比较多,包括轨道精度、运行距离、拖车与轨道的固有频率、拖车结构配置、拖车轮压均衡性、拖车控制系统品质等,其中轨道精度是关键因素[3]。而轨道精度取决于轨道设计与加工、轨道测量与调整以及水池地基环境因素等。因此,校核施工后的轨道精度显得尤为重要和复杂。
轨道系统精度的重要考核指标是轨道直线度、水平度、平行度等。为全面了解我校水池轨道精度达标情况,通过抽样校验基准线、局部控制点稳定性观测、轨道全局校验等方法,总结分析出轨道精度情况如下:
1)基准线抽样校验。实测基准桩数据经坐标体系旋转后换算,基准桩坐标最终成果如表1所示,该成果可以作为轨道基准,由于工区地质环境较为复杂,加上水池蓄水的变化和基准桩高度较高,坐标可能随时间存在微小变化。

表1 基准桩坐标成果
2)5组控制点稳定性监测情况。分别在主副轨上150、190,504,550,570 号扣件点附近各取 5 个控制点,并结合2016年3月至2017年5月共计6次监测值进行分析。
如图6结果显示,拖曳水池中间部位轨道间距受水位影响明显,而端部与砼结合部位的轨道,间距的变化反映的是温度与水位两种介质综合影响结果,曲线变形特点有很大区别。

图6 局部控制点稳定性观测间距随时间变化曲线
3)高程方向。主、副轨相对位置关系如图7,主副轨高程方向总体有波浪式凸起变形,主要是池壁段位间沉降差异引起,一定时间和区间范围内呈规律性变化。但对应点主副轨高差值接近于0,Z主-Z副=0视为双观测,则高程Z向直线性中误差±0.1 mm.

图7 轨道垂直方向主副轨相对位置关系
4)水平方向。通过对10~250 m段(着重考虑常用加速、稳速段)轨道水平方向变形数据分析,如图8所示,经最小二乘处理各测段轨道Y向直线性数据,形成Y向合理的调整后不符值,整体Y向直线性中误差小于±0.14 mm.
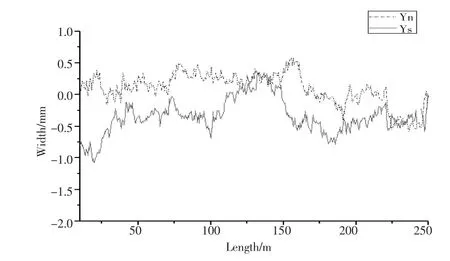
图8 轨道水平方向主副轨相对位置关系
5)直线度方向。利用激光跟踪仪专用靶球对A(主轨),B(副轨)两轨直线度进行检测,测量结果如图9~图10所示,除轨道两端外,直线度较好,绝大部分偏差在0.2 mm左右。

图9 A轨直线度测量结果

图10 B轨直线度测量结果
最后,通过开展模型试验,结合信号实测数据分析与频谱分析情况,对拖车控制精度及轨道精度进行验证,模型试验结果准确性及重复性良好。图11~图12显示为某船模阻力试验时厉图及频谱分析图,30 kn基本无振动干扰,信号采集带宽较小。
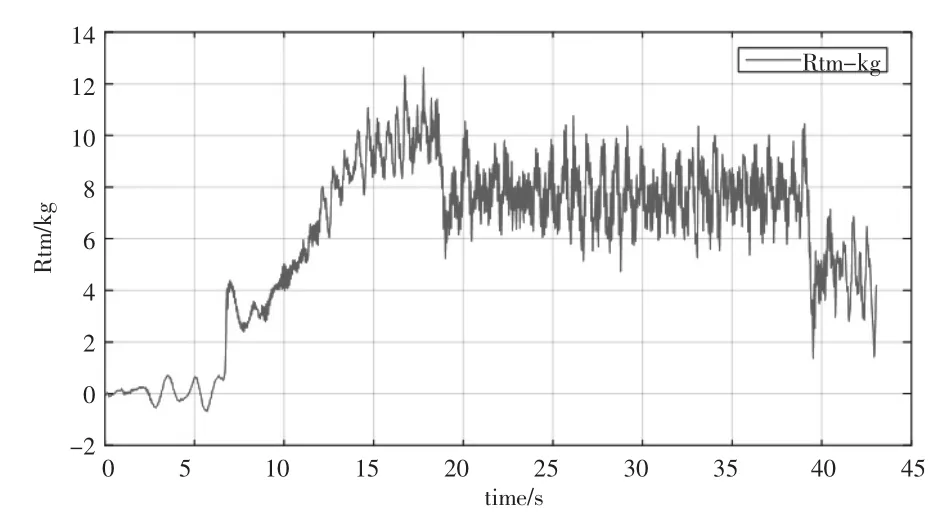
图11 Vs=30kn,Vm=4.806 m/s试验数据时厉图
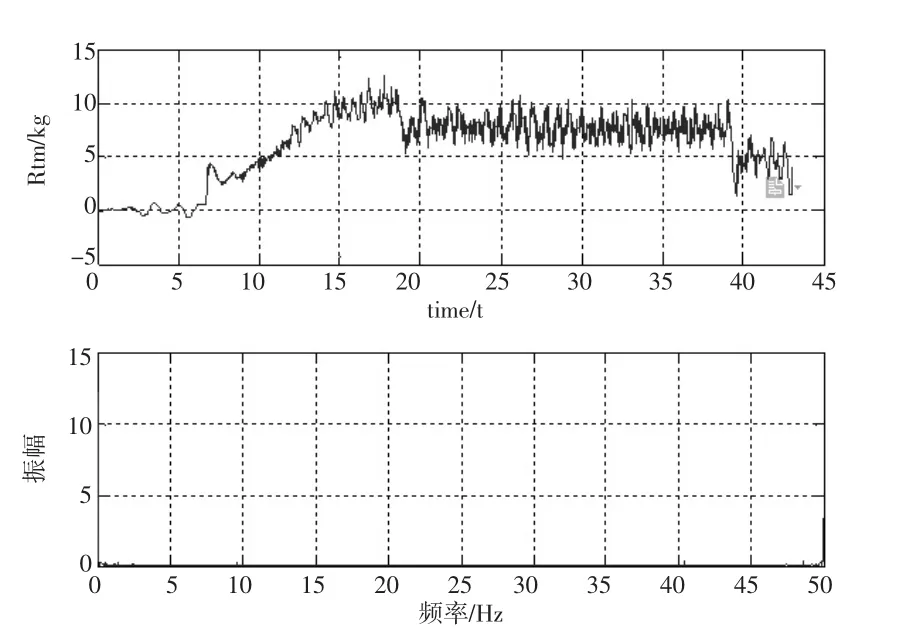
图12 Vs=30kn,Vm=4.806m/s试验数据频谱分析图
4 讨论
轨道建设工程系统复杂、技术要求高、地质条件复杂、周期长、难度大,任何工程环节对轨道质量与精度都有重大影响,针对以上各技术问题,提出几点建议如下:1)轨道设计形式必须考虑有足够横向、纵向调节余量,轨道加工与安装过程需严格控制施工误差;2)改进传统水槽测量方法,利用高精密激光跟踪仪最大限度提高测量调整精度;3)在水池土建过程中,充分考虑地基影响,保证足够的压水时间,对温度、池壁沉降与变形进行定期监测;4)对可能出现的拖车与轨道共振影响,建议轨道扣件或车轮采用不均匀形式分布,或在轨道相邻两扣件中心挠度满足荷载变形情况下,可考虑加大扣件支点距离,或利用高分子材料填充方式增加部分支撑点。
参考文献:
[1]俞湘三.船舶性能实验技术[M].上海:上海交通大学出版社,1991.
[2]上海交通大学多功能拖曳水池拖车与轨道系统验收技术资料[Z].2017.
[3]胡志仁,陈玉龙,金梁斌.高精度轨道调节锁紧机构设计[J].机电工程,2017(05):483-486,537.
[4]胡志仁,金梁斌,陈玉龙.拖曳水池高精度轨道测量方法研究[J].机械工程师,2017(7):120-123.
[5]杨大明,赵洪江.新建船池质量探讨[J].科学技术与工程,2009(03):758-760.
[6]肖代文,邹进贵,张洪波,等.拖曳水池轴线定位测量研究[J].地理空间信息,2007(04):88-89.
[7]周闻青,冷建兴,叶 欣,等.基于USMN的大型操纵性水池基础轨道空间位置测量方法研究[J].计测技术,2016(03):10-13.
[8]姚纪震,万承东.船模试验水池工程测量简介[J].工程勘察,1983(03):29-32.