一种近水面拖曳式浮标的设计及仿真分析
2018-05-21史淑玲
秦 成,史淑玲
(1.北京7220信箱,北京 100071;2.北京北方车辆集团有限公司,北京 100072)
21世纪是海洋的世纪,加强海洋的开发利用关系到国家的安全和长远发展,同时,为了实现海洋经济的可持续发展,在开发海洋的同时,必须加强对海洋环境的监测和保护。目前拖曳系统被广泛用于海洋监测和海洋环境调查[1,2]。
拖曳系统一般由浮标和缆绳等组成,由船舶拖带并通过浮标中携带的探测设备实现海洋环境监测。在海洋环境监测过程中,海上风浪流等自然因素都会对拖曳系统造成干扰,因此,拖曳式浮标设计中必须要实现浮标的拖曳稳定性和良好的可操控性[3-9]。基于以上要求,本文进行了一种近水面拖曳式浮标总体设计和仿真分析。
1 拖曳式浮标的总体设计
根据拖曳式浮标的使用环境及布设手段要求,确定了浮标的设计要求,如表1所示。

表1 浮标的设计要求
为降低拖曳阻力,本拖曳浮标外形采用流线型设计,并采用Rhinoceros软件对浮标的流线进行了优化设计,如图1所示为得到的浮标设计方案。
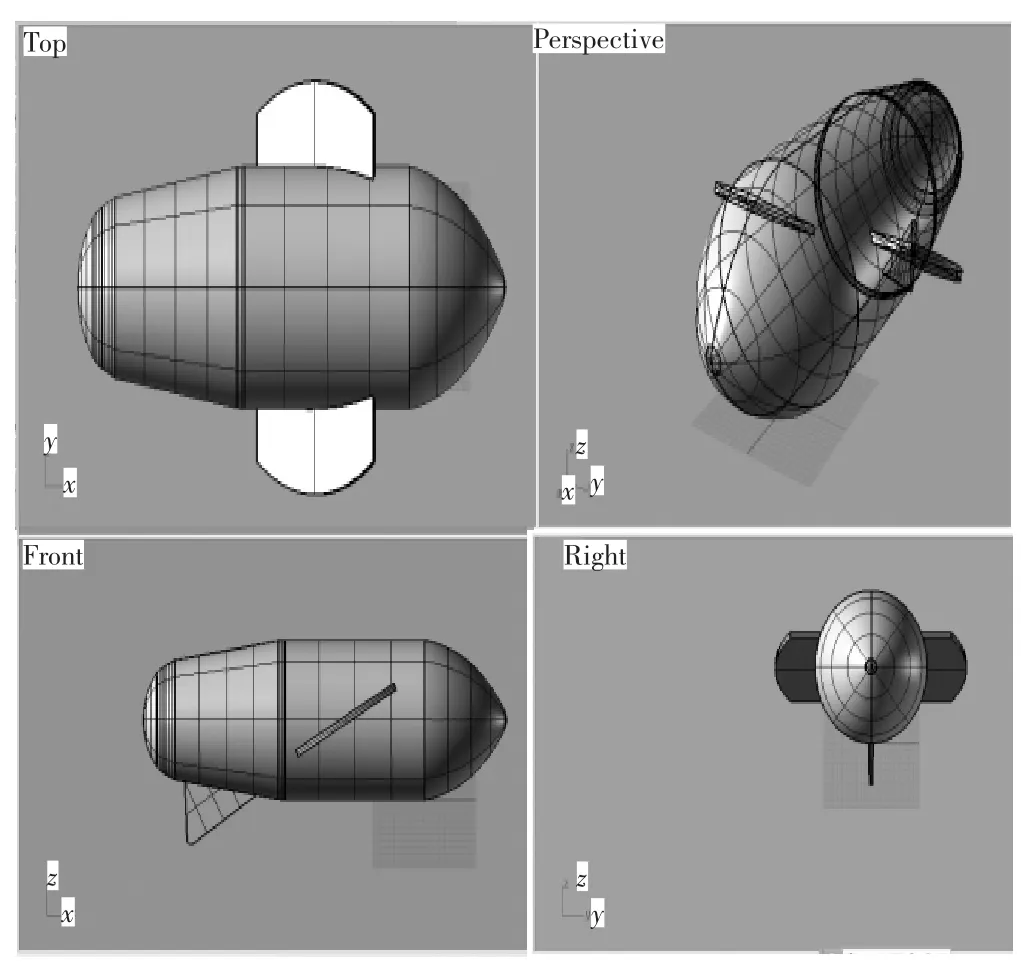
图1 浮标Rhinoceros流线优化设计
浮标主要由艇体、系留环、方位灯、水平翼、垂直翼、仪器舱、尾盖等部分构成,如图2所示。

图2 浮标组成图
艇体由内部发泡体和外层聚氨酯高分子层制成,艇体前端装有系留环,两侧和尾部装有平衡翼,顶部设有方位灯,其闪光灯用于夜间补给;垂直翼主要起导向作用(与舵相似);水平翼是在拖曳时产生升力。
艇体外层由高性能TPU聚合材料构成,具有弹性,能有效避免收放接触冲击损伤。艇体采用国际先进的流线型外型,通过对其密度、重心、浮心等进行设计,配合符合流体力学设计的平衡翼,保证了浮标在水中静止和拖曳航行时的稳定性。艇体由高性能TPU聚合物构成,具有弹性,抗冲击特性。前端的系留环使用高强度不锈钢材料制成,经久耐用。顶部的方位灯为闪烁光源,使用节能高效的发光二极管,装入两节普通的7号电池即可使用100 h以上,并有透光性好的防弹材料外壳保护。
2 拖曳式浮标的建模
浮标坐标系定义:模型的大地坐标系位为oexeyeze,其中oexe为舰船前进方向,oeye垂直向上,oeze满足右手定则。拖曳载体坐标系oxbybzb,其中oxb为舰船前进方向,oyb垂直向上,ozb满足右手定则,具体如图3所示。
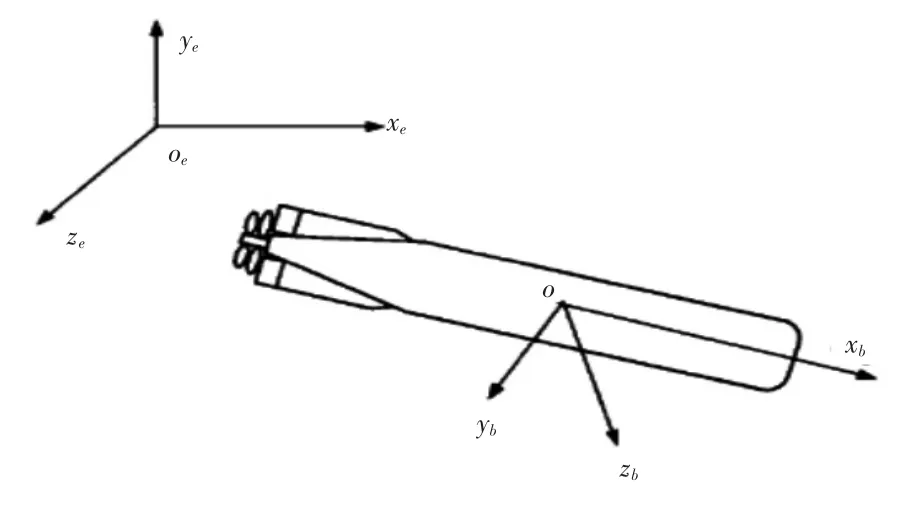
图3 浮标坐标系示意图
在大地坐标系中,浮标的位置在地面坐标系中表示为pe=[x,y,z]T;在浮标体坐标系中,速度为vb=[u,v,w]T,角速度为 ωbnb=[p,q,r]T;浮标受力与力矩分别为 fb=[X,Y,Z]T与 mb=[K,M,N]T.
浮标位置与姿态即广义位置η,可表示为η=[pn,θ]T;速度与角速度即广义速度V,可表示为 V=[vb,ωbnb]T;则浮标所受力与力矩可表示为广义力τ,有 τ=[fb,mb]T.
从而,得到拖曳式浮标的六自由度运动的动力学方程:

其中:
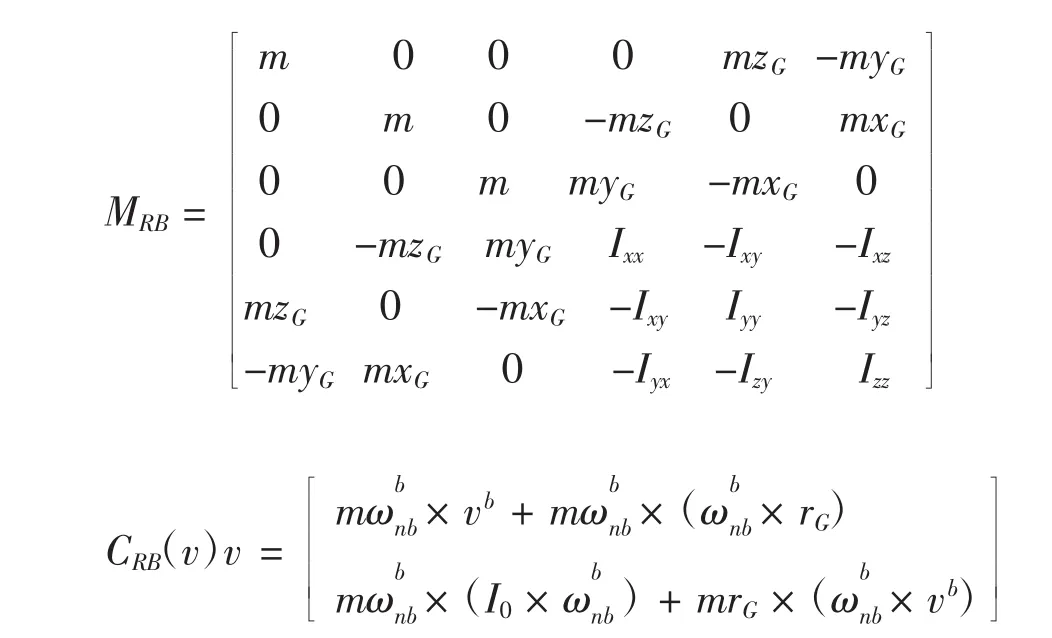
式(1)右端的τ是浮标受到的力和力矩,包括附件质量力、浮力、粘性阻力、升力、控制力等。
拖曳式浮标的运动学方程为:

3 仿真与分析
利用matlab对建立的拖曳式载体的动力学模型进行数值求解,得到了浮标的主要性能参数,结合流线型设计中确定的参数,汇总得到浮标的性能参数,如表2所示。

表2 浮标主要性能参数
对比浮标的设计要求(表1),浮标的总体设计满足指标要求。并进行了设计要求海况(4级海况)条件下,拖曳系统的稳定性仿真计算,拖曳式浮标的升沉和横摇曲线分别如图4、5所示。

图4 拖曳式浮标的升沉响应仿真曲线
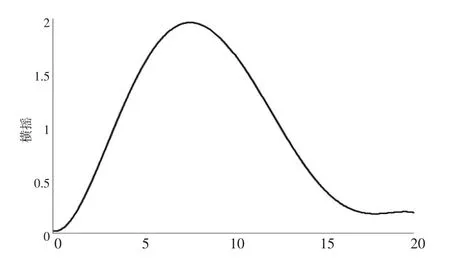
图5 拖曳式浮标的横摇幅频响应仿真曲线
由图4、5可见,在海上波浪频率影响范围内,浮标的升沉和横摇发生波动后趋于稳定,并且升沉和横摇的波动幅度相对较小。可见,在设计海况条件下,浮标的运动和姿态稳定性满足海洋环境监测要求。
4 结论
拖曳浮标系统在海洋资源监测中有广泛的应用,本文进行了一种拖曳式浮标的总体设计并进行了仿真建模和分析,仿真分析结果表明:在设计海况条件下,拖曳式浮标的稳定性满足要求。
参考文献:
[1]丁翠环,李孟学,韩 硕.海上试验声学浮标多功能设计[J].船舶电子工程,2015,35(3):129-131.
[2]李俊文,刘惠康,张孝春.基于ARM的波浪浮标设计[J].电子技术应用,2014,40(9):17-20.
[3]杨 瑞,刘寅东,顾 群.等.海上溢油跟踪定位浮标参数分析及技术优化研究[J].船海工程,2014,43(4):101-103.
[4]刘国栋.波浪浮标系统设计与测波方法研究[J].科学技术与工程,2011,11(35):8805-8809.
[5]徐玉如,苏玉民,庞永杰.海洋空间智能无人运载器技术发展展望[J].中国舰船研究,2006,1(3):1-4.
[6]燕奎臣,李一平,袁学庆.远程自治水下机器人研究[J].机器人,2002,24(4):299-303.
[7]李 哗,刘建成,徐玉如,等.带翼水下机器人运动控制的动力学建模[J].机器人,2005,27(2),128-131.
[8]冯更生,朱克强.水下拖曳系统运动姿态仿真研究[J].海洋工程,2005,23(4):56-63.
[9]王光源,马海洋,李 东.拖曳式通信浮标对潜艇隐蔽性的影响[J].舰船科学技术,2012,34(3):107-110.
