面向Micro-PNT系统的微陀螺敏感结构参数化有限元仿真研究
2018-05-21郭中洋
刘 飞,郭中洋
(北京自动化控制设备研究所,北京 100074)
0 引言
Micro-PNT是一种基于微惯性、时钟等的新型定位导航授时技术,具有全自主、微小型化等特征,有望在无卫星信号或卫星拒止条件下持续提供高精度PNT服务[1]。
微陀螺是Micro-PNT系统的核心器件之一,考虑到精度、体积、质量、功耗等方面的约束,当前国际上主流的可用于Micro-PNT系统的微陀螺主要包括多环微陀螺、微半球陀螺、微光子晶体陀螺以及微小型核磁共振陀螺等技术路线[2],其中多环微陀螺和微半球陀螺融合了传统高精度机电陀螺和现代微纳制造工艺的关键技术要素,兼具高精度和小型化等优势,是最有可能率先取得突破和实现应用的方向,也是当前微惯性器件技术领域的研究热点。
多环微陀螺和微半球陀螺均通过敏感结构实现对外部角速度输入的感测,敏感结构的几何尺寸对陀螺整体性能有较大影响。设计阶段,通常结合ANSYS等有限元仿真工具获取模态频率、频差、耦合量、刚度、增益等的影响要素及变化规律,并据此对敏感结构进行改进优化。
有限元分析大致可分为建模、网格划分、加载、求解和后处理等步骤。现有的敏感结构仿真优化多基于三维实体模型,通过网格划分等步骤将其转化为有限元模型并进行后续求解。该方法在分析多环、微半球类不规则结构(包含弧形、曲面、不等壁厚等)时存在建模复杂、难以参数化、计算效率较低等问题。
本文采用一种基于低维单元(一维梁单元、二维壳体单元等)的简化分析方法,并通过实常数等方式提供辅助几何信息,实现参数化求解,克服常规三维实体分析建模复杂、节点数量多、结果不易判读等问题,提升设计初期的关键尺寸寻优效率,加速陀螺研发进程。
1 多环敏感结构参数化仿真分析
1.1 多环敏感结构特征分析
如图1所示,多环敏感结构[3-4]为多圈圆环复式(环数一般大于10),相邻2个圆环之间由均匀分布的短直梁连接,中心位置为圆形的实心锚接区域,用于实现与封装壳体的固联。相比传统音叉型、蝶翼型、单环型结构,多环敏感结构具有全对称、高Q值、高灵敏度等优势[5]。

图1 多环敏感结构Fig.1 Micro multiple-ring structure
多环结构主体为圆弧形,各环间距不等,采用三维实体模型进行该型结构的仿真分析时,存在建模复杂、网格特征较难匹配结构特征等问题;此外受加工误差等影响,实际的圆环截面非理想矩形,且存在均匀性误差,一旦局部参数发生变化,需要重新定义几何尺寸、网格、载荷、边界约束等信息,过程繁琐。
1.2 多环敏感结构参数化仿真分析方法
(1)模型简化
针对多环敏感结构为弧形梁集合的特征,采用可用于三维结构一维化的梁单元[6]进行有限元模型简化。在ANSYS中,梁理论一般分为Euler-Bernoulli梁理论和Timoshenko梁理论两种[7]。前者又称工程梁理论,基于中性平面和横截面刚性假设,梁的弯曲变形可用空间曲线表示,从而大大减少变量数目,简化计算工作量;后者在前者的基础上引入校正因子,考虑横向剪切变形影响。
按照自底向上的建模方式将原有的三维弧形不规则结构离散化为均匀分布的平面节点集合体,如图2所示。基于上述节点集合,采用梁单元构建如图3所示的多环结构有限元模型。离散化模型中每个完整的圆环均由一系列沿圆周分布的等长度梁单元表征,在降低了模型复杂度的同时优化了网格均匀性。

图2 多环结构离散化节点集Fig.2 Discrete nodes set of the micro multiple-ring structure

图3 基于梁单元的多环结构有限元模型Fig.3 The beam-element FE model of micro multiple-ring structure
(2)单元选取及参数定义
ANSYS中常用的梁单元包括Beam4、Beam44、Beam188、Beam189等。对于理想模型,可选用Beam4单元,单元截面如图4所示,其中,TKZ为高度,TKY为宽度,IZZ、IYY为惯性矩;单元节点J含有沿X、Y、Z方向的平移和转动自由度,可用于承受拉、压、弯、扭等单轴受力。对于非理想模型,可选用Beam44、Beam188、Beam189等单元来表征由加工误差等导致的形状非对称因素。

图4 Beam4单元截面示意图Fig.4 The section scheme of the Beam4 element
对于Beam4和Beam44单元,可利用实常数表征多环结构典型部位的几何形貌,如表1所示;对于Beam188和Beam189单元,可采用SECTYPE、SECDATA等命令定义截面形貌[8],进而大幅简化模型构建及更新过程。

表1 梁单元主要实常数
(3)求解及结果分析
多环敏感结构主要结构参数如表2所示;为保证各方向机械性能的一致性,材料选用<111>型硅,其特性如表3所示。
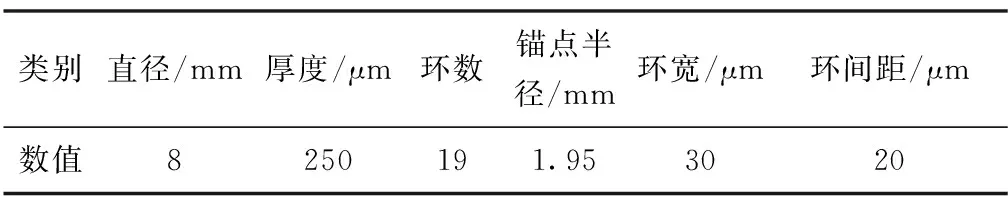
表2 多环敏感结构主要结构参数

表3 <111>型硅材料特性
以模态分析为例,分别采用三维实体和参数化两种分析方法对多环结构进行求解。其中三维实体分析选用Solid186单元,参数化分析选用Beam188单元。两种分析方法的网格划分密度相当,边界约束均设置在中心节点处,分析过程均采用ANSYS参数化设计语言APDL命令流实现,仿真结果如图5和表4所示。

图5 多环结构模态振型图
注:f8~f11分别表示8~11阶次模态频率,Δf1=f9-f8,Δf2=f11-f10。
可见,两种分析方法得到的工作模态分布阶次重合,工作模态与干扰模态的频差基本一致,同阶模态的频率偏差在8%以内,在初始设计阶段,该偏差在允许范围内;参数化分析所需的节点数量仅为三维实体方法的2%,可显著缩短单次仿真耗时。
2 微半球敏感结构实常数仿真分析
2.1 微半球敏感结构特征分析
微半球由传统半球谐振陀螺敏感结构微型化而来,如图6所示,主要由外部半球形壳体和中心实体支撑结构两部分组成[9]。

图6 微半球敏感结构Fig.6 Micro hemisphere structure
微半球结构通常采用热吹塑成型[10-12],受成型过程中壳体两侧压力差变化、重力等因素的影响,成型后的半球壳体存在不等壁厚(随高度、半径等变化)等特点,如图7所示,壁厚t随壳体上各点半径R和高度H的分布呈一定规律变化。

图7 微半球敏感结构截面示意图Fig.7 The section scheme of the micro hemisphere structure
由于包含曲面特征,采用实体模型仿真分析时,建模过程较为复杂,尤其是当分析不同壁厚对频率、角增益等参数的影响时,需要重新更改实体模型,复用性较差。
2.2 微半球敏感结构参数化仿真分析方法
(1)模型简化
针对微半球不等厚度薄壁结构的特点,采用壳单元进行有限元模型简化。在ANSYS中,壳理论基于Kirchhoff-Love假定[7],即薄壳变形前与中曲面垂直的直线,变形后仍然位于已变形中曲面的垂直线上,且其长度保持不变;平行于中曲面上的正应力与其他应力相比可忽略不计。
具体为定义截面线串(通过样条曲线生成),采用绕中心轴线旋转扫掠方式形成三维曲面,并通过壳单元构建如图8所示的微半球结构有限元模型,从而将原三维结构转化为精确二维模型,降低建模难度。

图8 基于壳单元的微半球扫掠模型Fig.8 The shell-element sweep model of micro hemisphere structure
(2)单元选取及参数定义
ANSYS常用的壳单元包括Shell63、Shell93、Shell181、Shell281等[13]。以Shell63为例,如图9所示,节点具有6个自由度,即沿节点坐标系X、Y、Z方向的平移和转动;该单元既具有弯曲能力又具有膜力,可以承受平面和法向载荷。

图9 Shell63壳体单元截面示意图Fig.9 The section scheme of the Shell63 element
可通过实常数给壳体单元指定不同厚度,单元内部的厚度在各节点之间光滑变化,不同单元的厚度可表示为空间位置的函数。
壳单元主要实常数汇总如表5所示。

表5 壳单元主要实常数
(3)求解及结果分析
微半球敏感结构主要结构参数如表6所示;材料选用熔融石英,其特性如表7所示。

表6 微半球敏感结构主要结构参数

表7 熔融石英材料特性[14]
以模态分析为例,分别采用三维实体和参数化两种分析方法对微半球结构进行求解。其中三维实体分析选用Solid186单元;参数化分析选用带有中间节点的Shell93单元,并通过RTHICK命令完成不同节点处壳体厚度实常数定义。两种分析方法的网格划分密度相当,边界约束均设置在中心节点处,分析过程均采用ANSYS参数化设计语言APDL命令流实现,仿真结果如图10和表8所示。

图10 微半球结构模态振型图Fig.10 The mode of the micro hemisphere structure

类别节点数有效质量/kg角增益模态频率及频差/Hzf1f2f3f4Δf三维实体308401.48×10-60.256103251032512297122971972参数化132001.55×10-60.255109011090113069130692168
注:f1~f4分别表示1~4阶次模态频率,Δf=f3-f2。
可见,两种分析方法得到的工作模态分布阶次重合,有效质量、角增益、工作模态与干扰模态的频差等参数基本一致,同阶模态的频率偏差在5%左右,在允许范围内;参数化分析方法所需的节点数量降低到原有的43%,在保证求解精度的同时提高了分析效率。
3 结论
本文主要针对微型多环和微半球这两种特征结构的设计仿真,提出了将三维实体转化为一维梁结构组合和二维截面线串的简化建模方法,并通过实常数和截面定义等方式对特征结构进行全参数化表征,从而大幅提高模型的复用性。通过对比,参数化分析方法在提升分析效率的同时也具备较高的分析精度,可有力促进多环微机电陀螺和微半球陀螺的设计收敛进程,支撑Micro-PNT技术快速发展。
参考文献
[1] Shkel A M. Precision navigation and timing enabled by microtechnology: Are we there yet? [C]// Micro-and Nanotechnology Sensors, Systems, and Applications III. International Society for Optics and Photonics, 2011: 803118.
[2] Lutwak R. Micro-technology for positioning, navigation, and timing towards PNT everywhere and always [C]// Proceedings of the 2014 1stInternational Symposium on Inertial Sensors and Systems (ISISS). IEEE, 2014: 1-4.
[3] Challoner A D, Howard H G, Liu J Y. Boeing disc resonator gyroscope [C]// 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS. Mon-terey, 2014: 504-514.
[4] Ahn C H, Ng E J, Hong V A, et al. Mode-matching of wineglass mode disk resonator gyroscope in (100) single crystal silicon[J]. Journal of Microelectromechanical Systems, 2015, 24(2): 343-350.
[5] Shcheglov K V, Challoner A D. Isolated planar gyroscope with internal radial sensing and actuation, US Patent 7040163[P]. 2006-05-09.
[6] Moaveni S. Finite element analysis theory and application with ANSYS(3rdedition)[M]. Beijing: Publishing House of Electronics Industry, 2008.
[7] Kohnke P. ANSYS mechanical APDL theory refe-rence (release 16.0)[S]. Canonsburg (PA): ANSYS Inc, 2015.
[8] 李婷婷, 王宗彦, 吴淑芳,等. 参数化有限元分析在模块化产品中的应用[J]. 机械设计与制造, 2016(1):115-118.
[9] Cho J Y, Woo J K, Yan J, et al. Fused-Silica Micro Birdbath Resonator Gyroscope(μ-BRG) [J]. Journal of Microelectromechanical Systems, 2014, 23(1): 66-77.
[10] Cho J Y, Yan J, Gregory J A, et al. 3-dimensional blow torch-molding of fused silica microstructures[J].Journal of Microelectromechanical Systems, 2013, 22(6): 1276-1284.
[11] Cho J, Nagourney T, Darvishian A, et al. Fused silica micro birdbath shell resonators with 1.2 million Q and 43 second decay time constant [C]// 2014 Hilton Head Solid State Sensors, Actuators, and Microsystems Workshop. Hilton Head Island, 2014.
[12] Senkal D, Ahamed M J, Ardakani M H A, et al. Demonstration of 1 million Q-factor on microglassblown wine-glass resonators with out-of-plane electrostatic transdu-ction[J]. Journal of Microelectromechanical Systems, 2015, 24(1): 29-37.
[13] 马辉, 能海强, 宋溶泽,等. 基于变厚度壳单元的旋转叶片固有特性分析[J]. 航空发动机, 2013, 39(5):26-30.
[14] http://www.accuratus.com/fused.html.
