无线时间同步的TDOA室内定位系统
2018-05-21赵思浩崔晓伟陆明泉
石 钦,赵思浩,崔晓伟,陆明泉
(清华大学 电子工程系,北京100084)
0 引言
随着科技的进步和信息化的不断深入,空间位置信息逐步成为了关系到国计民生的重要基础信息之一,各种位置测量技术和基于位置的应用蓬勃涌现。在室外空旷条件下应用最广泛的定位系统是以美国全球定位系统(Global Positioning Sys-tem,GPS)和我国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)为代表的全球导航卫星系统(Global Navigation Satellite System,GNSS)。人类的大部分时间是在室内度过,室内的位置信息获取在近20年来受到了学界和工业界的广泛重视。需要注意的是,GNSS由于导航卫星距离地球遥远,其定位信号到达地面已经很微弱,在室内经过墙壁等的阻隔基本无法使用,因此发展除了GNSS之外的室内无线定位技术势在必行。
测量接收信号强度(Received Signal Strength,RSS)的方法比较直观,一种思路是根据无线信号在空间中随距离衰减的函数关系进行建模,以获取用户与几个固定信号源之间的距离。一般需要事前对待定位区域进行测量以建立信号强度指纹数据库,应用时通过将用户测量到的信号强度与指纹库进行匹配以获取用户位置估计[1-7]。但由于环境因素、不同收发设备的差异,该方式测量精度同样较差,而且需要对待测区域内的大量参考位置进行测量并记录其参数,一旦环境发生变化则需要重新进行数据采集和记录工作。因此无论从定位精度还是技术应用的复杂程度方面而言,该方法都具有较大局限性。
测量信号到达角(Angle of Arrival,AOA)方式对接收天线提出的要求较高,为精确测得到达角,可能需要使用多个天线甚至体积较大的天线阵列[8-10]。因此在小型化设备中很少应用,室内环境下多径和信号环境的变化都会对测量结果产生严重影响[11],同时随着收发机距离的增加,测量角度中的误差会被放大导致较大定位误差[12]。
测量信号到达时间(Time of Arrival,TOA)的原理直观,如果信号发射时刻已知,获得信号接收时刻后,利用电波传播速度与2个时刻差的乘积即可获得发射机与接收机之间的距离。当获得多个基站与用户设备的距离测量值后,即可解算得到用户位置[13]。这种方式需要发射机与接收机进行精确的时钟同步以保证发射和接收时刻具有相同的时钟基准,而在实际应用场景中是很难实现用户与定位基站间的精确时钟同步的。如果不具备时钟同步条件,则一般通过双向通信测量信号往返所需要的时间而后得到用户与基站之间的距离[14-15],这样带来的问题是通信次数增多导致空口占用时间增加,从而降低了用户数量上限且单个用户定位更新频度较低。
与测量到达时间的方法相比,到达时间差(Time Difference of Arrival,TDOA)方法不需要基站与用户设备之间的时钟同步,仅需要基站间的时钟同步即可[16],这种方法仅需用户与基站间的单次通信即可完成定位,空口占用有所降低。一种实现思路是不同基站测量同一个用户设备发射信号的到达时间后汇总至中心并得到到达时间差观测量,而后完成定位解算[17-19],本文基于这种定位方式对无线定位系统进行设计和实现。
1 定位原理
设想在一个无线定位系统中,存在若干位置已知的固定基站,用户终端发送定位信号后由固定基站接收,多个基站收到的定位信号可以组成多组TDOA观测量,此时以固定基站作为交点建立双曲线,多个双曲线的交点即为用户终端的位置。基于这一原理,多组TDOA观测量组成方程组即可解得用户位置坐标。
可见,获得多组TDOA观测量是完成定位解算的关键步骤。在本文设计的定位系统中,用户终端发送的定位信号中包含有以终端时钟计数的本地的发射时刻,固定基站接收信号的本地时刻也可测量获得,其数学表达式如下所示。
TAirxT=TTtx+dTtx+DTi+bTi(TTtx)+dAirx
(1)
TAjrxT=TTtx+dTtx+DTj+bTj(TTtx)+dAjrx
(2)
其中,TAirxT为基站Ai接收用户终端T的定位信号的本地接收时刻,TTtx为终端T发射时刻,dTtx为终端T发射延时,DTi为终端T与基站Ai的真实距离(在本文中,均换算成信号传播时间),bTi(TTtx)为T与Ai在发射时刻的钟差(基站Ai的时间减去T的时间),dAirx为Ai的接收延时。这里的发射和接收延时都模型化为常量,即不随时间和收发端距离变化。
以基站i的观测量为参考构建原始TDOA观测量,则式(2)-式(1)有:
DTj-DTi=TAjrxT-TAirxT-bij(TTtx)-dAjrx+dAirx
(3)
其中,基站Ai、Aj的接收时刻可以本地获得,Ai与Aj在TTtx时刻的时钟偏差bij(TTtx)、接收延时dAjrx和dAirx需要采取一些方法测量或求得后才能得到所需的TDOA观测量。
首先考察时钟偏差bij,如果基站之间采用有线连接完成时间同步,则该项变量可以获得。但有线连接的硬件实现复杂度较大、系统部署难度较高,因此考虑设计一种能够获得时钟偏差值的无线时间同步方案。为此,基站间需要进行无线通信。这里提出一种单向通信的时间同步方案以尽量减小空口开销。假设基站Ai发射信号,基站Aj接收信号,则接收时刻表示为
TAjrxAi=TAitx+dAitx+Dij+bij(TAitx)+dAjrx
(4)
其中,TAjrxAi为基站Aj接收到基站Ai信号的本地时刻,TAitx为基站Ai的本地发射时刻,Dij为二者的真实距离,bij(TAitx)为在TAitx时刻的时钟偏差,dAitx为基站i的发射延时,dAjrx为基站Aj的接收延时。
将式(4)代入式(3)得到:
DTj-DTi=TAjrxT-TAirxT-TAjrxAi+TAitx+dAitx+
Dij+dAjrx-dAjrx+dAirx-kij·(TTtx-TAitx)=
TAjrxT-TAirxT-(TAjrxAi-TAitx-Dij)-kij·
(TTtx-TAitx)+(dAitx+dAirx)
(5)
其中,最后一个等号右侧的第一个括号项可以通过对式(4)所表示的多次发射和接收时刻滤波得到其较准确的估计值,将其称为伪钟差;kij为基站Ai与Aj的相对时钟漂移,可以通过对相邻2次伪钟差做差分得到,也可以通过对连续多次伪钟偏差滤波得到。因此式(5)中唯一的未知数就是最后一个括号项dAitx+dAirx,即基站Ai的发射与接收延时之和,只要测得该值,即可完成TDOA测量值的组成从而进一步完成定位解算。
对于式(5),如果等式左侧为已知,则可以得到dAitx+dAirx的值。为此可以将用户终端放置于已知位置,并测量终端与基站Ai和基站Aj的真实距离从而得到待测的dAitx+dAirx。
2 TDOA定位算法及其改进
按照第1节所述原理得到同一个终端的TDOA测量值后,可以使用一些传统的解算方法,例如基于泰勒展开的最小二乘迭代算法[20-21]。这里对泰勒展开算法进行描述。
首先需要对用户的位置给出一个初始估计,而后进行迭代。假设以基站Ai为参考形成TDOA测量值,则在每次迭代过程中,用户与基站之间的TDOA估计值如下所示。
(6)

当前终端位置估计值与基站Ai之间的视线方向单位向量估计值表示为式(7)。
(7)

按照式(5)得到的TDOA测量值与按照式(6)给出的TDOA估计值之间存在残差,将所有残差写为矢量形式
(8)
当前迭代的设计矩阵写为
(9)
对终端位置进行修正:
当相邻2次迭代的位置修正结果很接近时,算法停止,将本次迭代得到的位置结果输出作为定位结果。
实际应用当中,可能只关心用户在某个平面内的二维位置而无需计算三维位置,以对平地运行的车辆定位的场景为例,此时可以对上述算法进行适应性改进。如果用户三维位置中的高度恰好与待求解用户位置矢量PT中的一个轴向重合,则可以将高度作为已知值,此时,在迭代过程中可以仅使用设计矩阵H中对应其他2个维度的两列参与位置更新计算。利用这一方法可以减小计算量并提高定位精度。
3 系统总体设计
为提升用户容量,需要减少或避免空口无线信号的冲突,因此采用单向通信的模式。根据第2节对定位原理的分析,基站之间需要通信以获取时钟偏差信息,同时基站还需要侦听用户终端发射的信号以测量到达时间。为避免基站通信信号和用户终端发射信号的空口冲突,可以采用对其进行预先时隙划分的方案,即分别为基站发射的同步信号和终端发射定位的信号划分时隙,划分示意图如图 1所示。

图1 时隙划分示意图
Fig.1 Time slot division
理论上,只要有一个基站发送信号,其他所有基站接收该信号即可完成时钟偏差信息的获取,但考虑实际应用当中可能存在的区域较大或遮挡等问题,导致单个基站发射的信号无法被所有基站接收,因此可以采用多个基站发送信号的方法以应对覆盖范围不足的问题并实现区域的扩展。这里将发射信号的基站称为主基站,接收信号的基站称为从基站,对于每个从基站而言,只需能够接收一个主基站的信号即可获得相对主基站的时钟偏差信息。如需获得所有主从基站全局的时钟偏差信息,则保证主基站间可以实现无遮挡的视距通信即可。基站可以获得同步信号和定位信号的到达时间信息,将这些信息传输汇总到中心主机完成基站时钟偏差信息的提取和用户位置信息的解算。系统组成示意图如图 2所示。
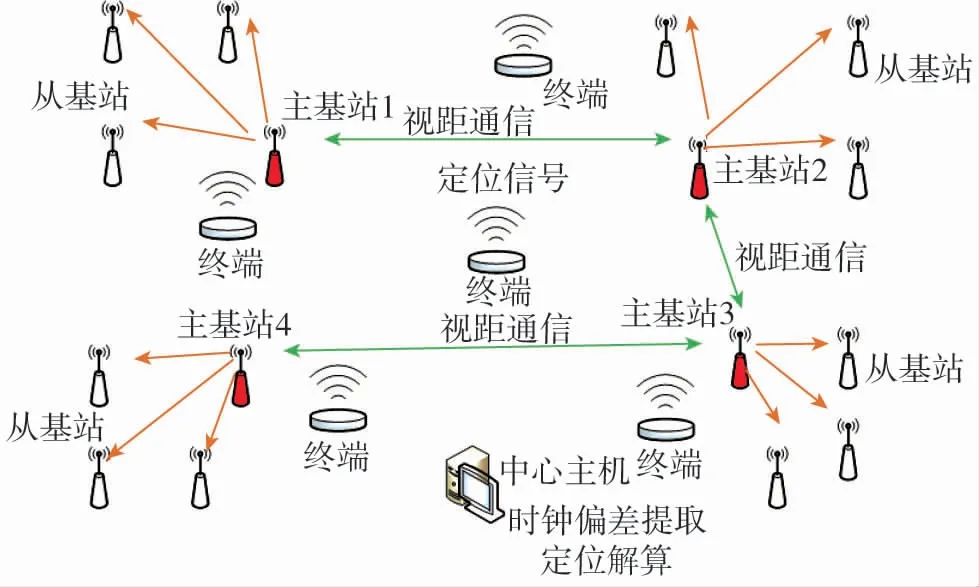
图2 系统组成示意图Fig.2 System composition diagram
4 系统实现
基于以上定位原理和总体设计方案,采用商用超宽带测距芯片作为基站和终端的射频收发与基带处理模块[22],使用微控制器对其进行控制并实现时隙划分与数据传输,通过WiFi模块将基站数据汇总至主机。主机运行定位软件完成时钟信息提取和定位解算并将用户位置显示在图形界面上。
基站的硬件组成框图如图 3所示。终端与之类似,但没有WiFi模块。
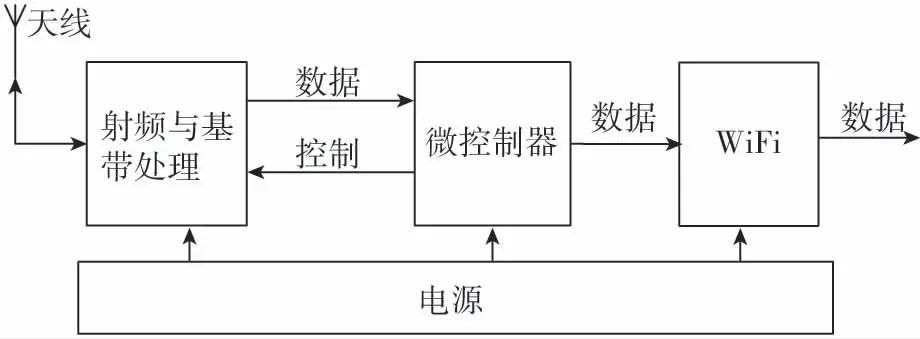
图3 基站硬件组成Fig.3 Hardware implementation of base stations
按照总体设计方案对时隙进行划分,具体为在1s内划分了1100个时隙,其中100个用于基站发射同步信号,剩余1000个用于发射用户终端的定位信号,因此该系统的用户容量为1000用户×定位更新频度/s。举例来说,该系统可以支持10个用户每个100Hz更新频率,或者100个用户每个10Hz更新频率。
5 试验验证
将4个基站布置于一个正方形区域的四角,4个基站高度一致。如图 4所示,定义了一个本地直角坐标系,同时展示了在该坐标系中4个基站的三维位置坐标,基站的位置坐标使用激光测距仪测量,误差不超过2cm。
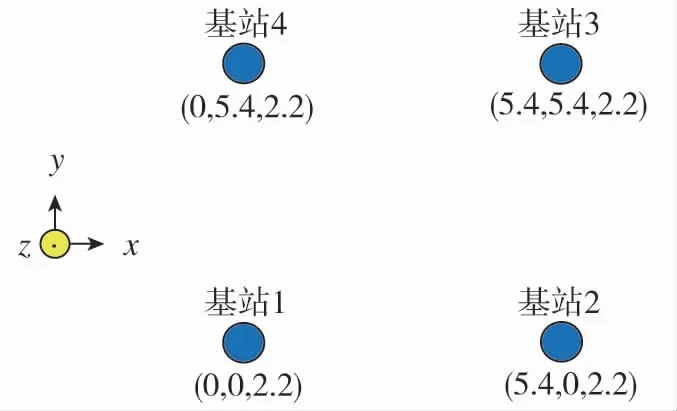
图4 基站位置坐标Fig.4 Coordinates of base stations
基站1作为主基站周期性发送同步信号。将用户终端静止置于定位区域内,位置坐标为(0.85, 0.8, 1.0),用户终端与所有基站间无遮挡。按100Hz定位频度采集200s数据并进行定位,终端的定位结果如图 5所示。对上位机软件的计算时间进行统计,单次解算时间均不超过1ms,其系统资源占用率小于1%,由于操作系统最小时间分辨率仅能达到1ms,因此可以间接得知定位解算时间很短,不会对用户造成明显时间延迟。
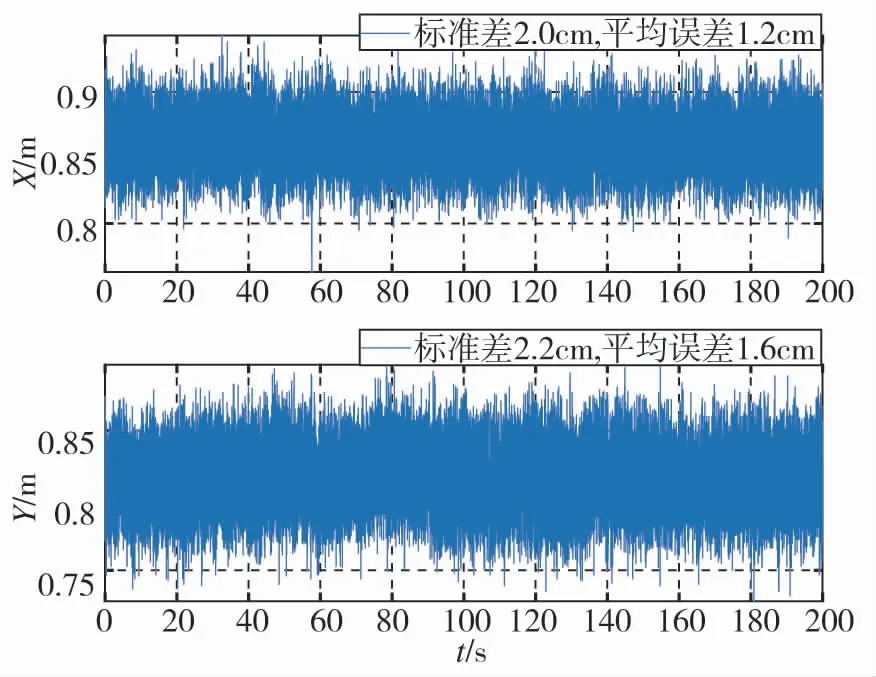
图5 终端定位结果Fig.5 Localization results of the mobile user terminal
可以看到,定位结果与终端摆放位置基本一致,验证了定位原理、算法和系统实现的有效性。
6 结论
1)本文研究了一种测量到达时间差的无线定位技术,分析了其定位原理,提出了一种通过基站间单向通信实现无线时间同步的方法。
2)基于以上原理和方法设计并实现了一个室内无线定位系统,在该系统中,用户终端和主基站分别在预设固定时隙发送定位信号和同步信号,从而避免空口冲突,基站观测到的所有信号到达时间在主机处汇总处理完成用户位置解算。
3)对以上系统进行了用户终端定位试验,结果表明所提原理和设计方案的正确性,实现了基站间的无线时间同步并给出了用户终端的正确定位结果,误差在厘米量级。
后续工作包括进一步优化定位算法,同时对其误差源进行更细致的研究,使该方案在遮挡等复杂场景下具有更优的性能。
参考文献
[1] Khalajmehrabadi A, Gatsis N, Akopian D. Modern WLAN fingerprinting indoor positioning methods and deployment challenges[J]. IEEE Communications Surveys & Tutorials, 2017, 19(3): 1974-2002.
[2] Morales J A,Akopian D, Agaian S. Faulty measurements impact on wireless local area network positioning performance[J]. IET Radar, Sonar & Navigation, 2014, 9(5): 501-508.
[3] Liu H,Darabi H, Banerjee P, et al. Survey of wireless indoor positioning techniques and systems[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2007, 37(6): 1067-1080.
[4] Bandara U, Hasegawa M, Inoue M, et al. Design and implementation of a bluetooth signal strength based location sensing system[C]//IEEE Radio and Wireless Conference. Atlanta,2004: 319-322.
[5] Atia M M, Korenberg M, Noureldin A. A consistent zero-configuration GPS-Like indoor positioning sys-tem based on signal strength in IEEE 802.11 net-works[C]//2012 IEEE/ION Position Location and Navigation Symposium (PLANS). Myrtle Beach, 2012: 1068-1073.
[6] 邹德岳. 异构无线系统室内外无缝定位技术研究[D]. 哈尔滨:哈尔滨工业大学, 2016.
[7] 赵永翔. 基于无线局域网的室内定位系统研究[D]. 武汉:武汉大学, 2010.
[8] Gezici S. A survey on wireless position estimation[J]. Wireless Personal Communications, 2008, 44(3): 263-282.
[9] Farid Z, Nordin R, Ismail M. Recent advances in wireless indoor localization techniques and system[J]. Journal of Computer Networks and Communications, 2013,13(42):12.
[10] 梁玉杰. 基于超格点DOA的室内无线传感器网络定位技术研究[D]. 上海:上海交通大学, 2015.
[11] 裴凌, 刘东辉, 钱久超. 室内定位技术与应用综述[J]. 导航定位与授时, 2017, 4(3):1-10.
[12] Dempster A G. Dilution of precision in angle-of-arrival positioning systems[J]. Electronics Letters, 2006, 42(5): 291-292.
[13] Gu Y, Lo A, Niemegeers I. A survey of indoor positioning systems for wireless personal networks[J]. IEEE Communications Surveys & Tutorials, 2009, 11(1): 13-32.
[14] Yang C,Shao H R. WiFi-based indoor positioning[J]. IEEE Communications Magazine, 2015, 53(3): 150-157.
[15] Jia M, Zhao S, Dong D, et al. Positioning algorithm adaptation of an indoor navigation system for virtual reality game applications[C]//Proceedings of the ION GNSS. Oregon, 2016:1824-1830.
[16] Gezici S, Tian Z, Giannakis G B, et al. Localization via ultra-wideband radios: a look at positioning aspe-cts for future sensor networks[J]. IEEE Signal Processing Magazine, 2005, 22(4): 70-84.
[17] Zhao S, Cui X, Ma T, et al. Design and implementation of a wireless time synchronization based positioning system[C]// Proceedings of the ION GNSS. Portland, 2017:767-772.
[18] Zwirello L, Schipper T, Harter M, et al. UWB localization system for indoor applications: Concept, realization and analysis[J]. Journal of Electrical and Computer Engineering, 2012(5): 4.
[19] Zhang G, Krishnan S, Chin F, et al. UWB multicell indoor localization experiment system with adaptive TDOA combination[C]//Proceedings of the IEEE 68thVehicular Technology Conference,Calgary, 2008:1-5.
[20] Foy W H. Position-location solutions by Taylor-series estimation[J]. IEEE Transactions on Aeros-pace and Electronic Systems, 1976,12(2): 187-194.
[21] Chan Y T, Ho K C. A simple and efficient estimator for hyperbolic location[J]. IEEE Transactions on Signal Processing, 1994, 42(8): 1905-1915.
[22] Deca Wave. DW1000 Transceiver Datasheet[S]. 2015.
