轨道预测辅助GPS载波跟踪技术用于低轨道卫星定位研究
2018-05-21左启耀
左启耀,袁 洪,王 勋
(1.北京自动化控制设备研究所,北京 100074;2.中国科学院光电研究院,北京 100094)
0 引言
运行在近地轨道空间的低轨道(Low-Earth Orbit, LEO)人造卫星高度远远低于GPS卫星,所以应用GPS定轨是常用的一种手段。但是由于LEO卫星轨道低、速度大,GPS信号跟踪环路设计需要采取相应措施:更高的环路阶数,或者更大的环路带宽。而这些措施会降低测距精度和环路的稳定性。
针对LEO卫星应用,本文研究基于轨道预测思路解决星载GPS信号跟踪问题。首先,由于LEO卫星与GPS卫星之间的相对运动,多普勒效应会体现在GPS信号接收上;其次,LEO卫星在轨运行轨迹是可以预测的,而GPS卫星轨迹是可实时计算的,因此LEO卫星与GPS卫星之间的多普勒效应是可以预测的。基于上述分析,预测多普勒频移用于辅助跟踪环路是一种解决LEO卫星信号跟踪问题的可行思路。同时该方法还具有如下优势:
1)低的环路阶数会降低环路更新运算量,同时更加稳定;
2)小的环路带宽会提高接收机跟踪灵敏度,同时提高测距精度;
3)可以实现自闭环,辅助信息不依赖外部设备,如惯性系统,自主性更高。
动态引起的多普勒频移主要体现在载波上,载波跟踪相比伪码跟踪更困难,本文重点针对载波环路的多普勒频移辅助进行研究。
1 多普勒频移辅助载波跟踪环路
基于多普勒频移辅助的载波环路原理如图1所示。载波环路跟踪的卫星信号频移fPLL可表示为[1-2]
fPLL=fclk+fnoise+fdopp
(1)

(2)
式中,δfdopp为多普勒频移估计偏差。则可推导载波环路滤波器输出ΔfPLL为
ΔfPLL≈fclk+fnoise-δfdopp
(3)
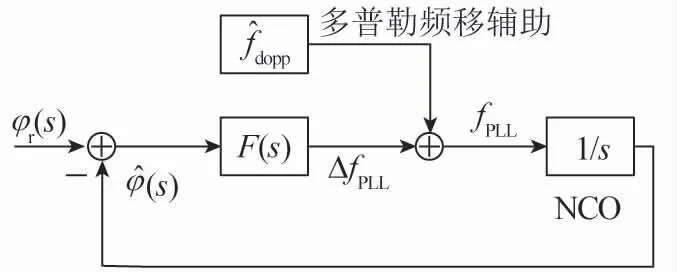
图1 多普勒频移辅助载波环路Fig.1 The doppler assisted carrier loop
如果无多普勒频移辅助就是普通的载波环路,ΔfPLL即是fPLL。LEO卫星和GPS卫星之间相对运动引起fdopp剧烈变化,即ΔfPLL变化率很大。为了维持对信号ΔfPLL的锁定,可以增加环路带宽,由于引入较多的环路噪声,会降低环路测距精度;也可以提高环路阶数,但会降低环路跟踪稳定性。
2 低轨道卫星多普勒频移估计
2.1 多普勒频移估计
多普勒频移计算公式为[5]
(4)
式中,fL1是GPS载波频率,ν是LEO卫星与GPS卫星之间的相对速度,c是光速。
ν由式(5)计算
v=

(5)

因此,估计多普勒频移需要预先计算GPS卫星的位置、速度,并推算LEO卫星的位置、速度。
2.2 GPS卫星位置、速度计算
GPS卫星位置、速度计算需要用到GPS卫星广播星历。星历提供开普勒轨道参数、卫星钟差以及轨道摄动修正量等参数,每2h进行更新。可依据ICD文件[6]提供的算法计算卫星位置、速度,所计算位置精度在2m以内,速度精度在0.5m/s以内[7]。短时间内也可以利用外推算法计算GPS卫星位置和速度。
2.3 LEO卫星位置、速度预测
LEO卫星的位置、速度预测流程图如图2所示。首先利用星载接收机定位后的位置、速度推算同时刻LEO卫星的轨道根数,然后依据这些轨道根数计算下一时刻LEO卫星的位置、速度。LEO位置、速度预测是一个“估计—修正—估计”的过程。但是LEO卫星轨道低、速度快、受摄动影响大,轨道参数有效期远低于GPS卫星,所以预测时段不能太长,否则误差较大。

图2 低轨道卫星位置、速度预测Fig.2 The LEO satellite position and velocity predictions
图3所示为LEO卫星的位置、速度的预测示意图。
图3 LEO卫星位置、速度预测示意图Fig.3 The sketch map of the LEO satelliteposition and velocity predictions
在图3中,假设LEO卫星轨道表示为图中虚线,如果预测时间段设置为Ts,在Ts内利用同一组根数进行T×1000次预测(即每ms一次)。第一次预测LEO卫星位置来自于GPS定位,精度最高。此后每次预测误差逐渐增加,预测位置逐渐偏离真实轨道,在图中形成不连续的弧段,即实线部分。随后的Ts重新进行上述过程,确保位置推算误差不会长时间积累。
已知轨道根数计算卫星位置、速度可参考2.2节。由LEO卫星位置、速度求解轨道根数步骤如表1所示[8]。
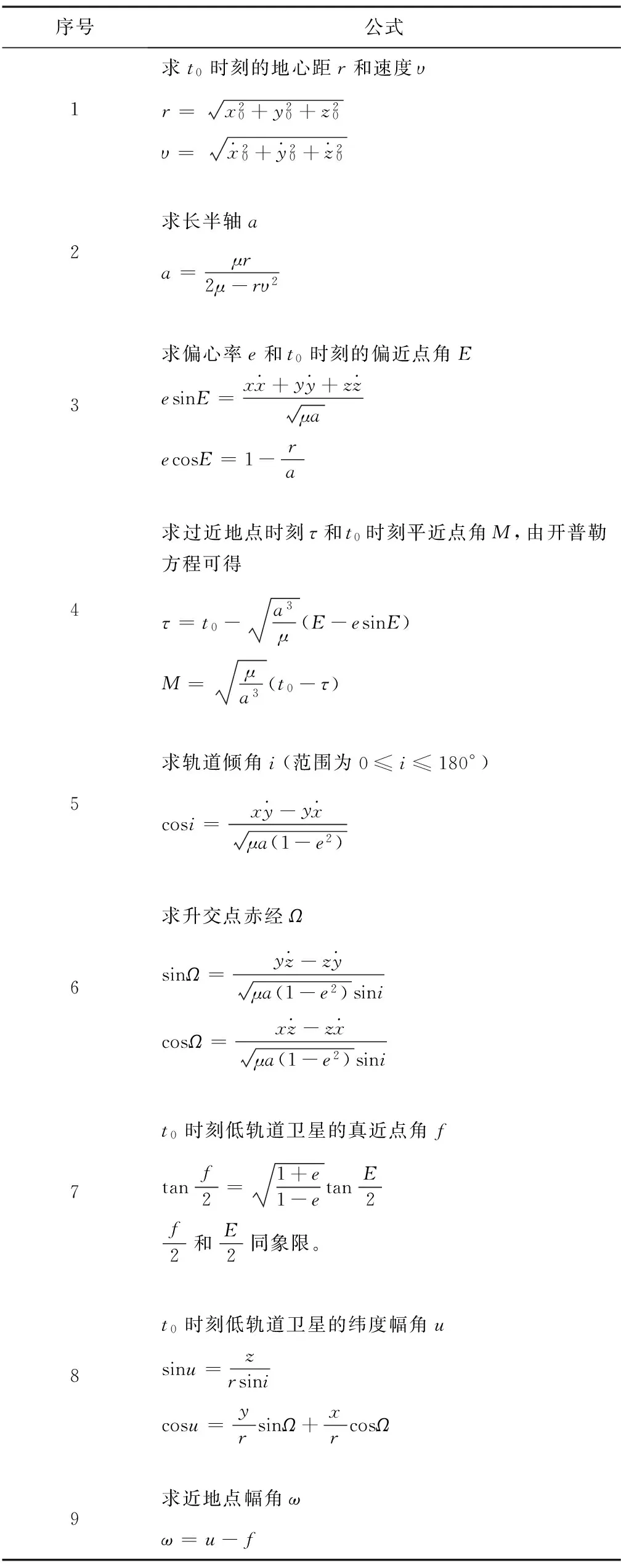
表1 轨道根数求解步骤
3 多普勒频移辅助载波环路流程
多普勒频移辅助载波环路流程如图4,具体步骤如下:
1)根据LEO卫星的位置、速度推算其轨道根数;
2)根据轨道根数计算LEO卫星在下1ms的位置、速度;
3)由GPS广播星历计算GPS卫星位置、速度;
4)由式(5)计算GPS卫星和LEO卫星之间的径向速度ν,根据式(4)计算出多普勒频移fdopp;
5)按照图1算法,使用计算出的fdopp辅助载波环路;
6)在步骤1)后的Ts内,每Nms执行步骤2)、3)、4)、5),直到整Ts结束。
7)星载GPS接收机进行定位,解算出LEO卫星位置、速度后,返回执行步骤1)。

图4 多普勒频移辅助载波环路流程Fig.4 The process of doppler assisted carrier loop
上述步骤中,步骤1)、7)执行周期为Ts,步骤2)、3)、4)、5)执行周期为Nms;经过多普勒频移辅助,载波环路中的动态大部分被消除,只残留小部分动态,这是由于预测的多普勒频移仍存在一定偏差。此时,载波环路可以采用二阶环,环路带宽可压缩至更小,同时还可延长预检测积分时间至Nms。但由于环路中仍残留部分动态,预检测积分时间又不能选择过长。
假设LEO接收机定位误差RMS为35m,测速误差RMS为0.8m/s。同时综合2.2节GPS位置、速度计算误差和2.3节预测误差,多普勒频移首次计算误差在10Hz以内,可以满足应用。在随后的Ts内,该误差逐步增大,误差的大小与T的选择以及具体LEO卫星的轨道动态有关。
运算方面,每Ts需要增加一次轨道根数求解,每Nms增加一次GPS卫星位置、速度计算和LEO卫星位置、速度计算。而普通无辅助接收机环路更新周期为1ms,虽然接收机环路更新率降为1/N,但运算复杂度和运算量大大增加。考虑算法的实用性和实时性,星载接收机可采用高运算能力的芯片,如多核DSP;在保证适应动态的前提下也可适当加长N值,如N设置为10ms,一般接收机所用DSP芯片都可在10ms内完成上述运算;另外,还可以采用插值的方法[9]计算GPS和LEO卫星的位置、速度。采用3次艾米尔特插值计算所得的卫星位置和速度误差分别小于10cm和1mm/s,而它的计算比直接用卫星星历参数计算卫星位置和速度的方法要快约20倍[10]。
4 仿真分析
4.1 仿真环境设计
为对本文算法进行分析,利用神舟4号飞船实测数据进行数学仿真。神舟4号飞船轨道高度约330km,绕地飞行一周约100min,符合低轨道卫星运行特点,因此可看作某种LEO卫星。
神舟4号飞船实测位置、速度周期为1s,为了合成更为连续的GPS仿真信号,首先以1ms为周期对实测数据进行插值;然后根据当时某颗GPS卫星的星历,以1ms为周期计算该卫星的位置、速度;此后就可以计算飞船与GPS卫星之间的多普勒频移,每1ms计算一次,用于仿真飞船上GPS接收机所接收到的某颗GPS信号。在MTALAB软件中实现信号仿真,主要仿真参数如下:
1)GPS卫星:14号卫星;C/N0:25~50dBHz,可设置;载波:中频频率1.25MHz,初始相位1/6π,多普勒频移依据上述过程计算,更新周期1ms;导航数据:随机,更新周期20ms;采样率:5MHz;
2)仿真时长:10min。
4.2 仿真数据处理
在MATLAB软件中通过GPS信号跟踪程序对仿真信号进行跟踪,可得到每ms本地载波环路NCO的相位值,与仿真数据每ms载波相位真值进行比较,即得到真实载波锁相环相位跟踪误差。其中,GPS信号跟踪程序载波锁相环环路带宽、预检测积分时间可根据仿真需求设置,不同参数下的仿真结果后面详述。
一般GPS接收机定位频率为1~10Hz,同时兼顾处理器运算能力和计算精度要求,仿真中预测时间段T设置为1s,即轨道根数推算频率为1Hz。
4.1节只对当时一颗卫星信号进行了仿真,并不能定位,因此仿真过程种作了2个假设:
1)假设算法应用之初,环路已正常跟踪卫星信号;若环路正常跟踪,则星载GPS接收机能够定位、测速。
2)假设接收机定位误差RMS为35m,测速误差RMS为0.8m/s。
4.3 仿真结果分析
载波锁相环的相位误差(1σ)为
(6)
其中,σj为热噪声引起的相位颤动,θe为由动态应力引起的误差。经验门限为σPLL≤15°,限制在15°以下环路鉴别器具有良好的线性性能[5]。
图5~图8所示为环路带宽分别为10Hz、5Hz、3Hz、1Hz,预检测积分时间N分别为1ms和10ms,不同C/N0值下,利用多普勒频移辅助二阶载波环路时的相位误差。

图5 带宽10Hz多普勒频移辅助二阶环路1σ相位误差Fig.5 The phase error of the doppler assisted second order loop with the bandwidth of 10Hz

图6 带宽5Hz多普勒频移辅助二阶环路1σ相位误差Fig.6 The phase error of the doppler assisted second order loop with the bandwidth of 5Hz
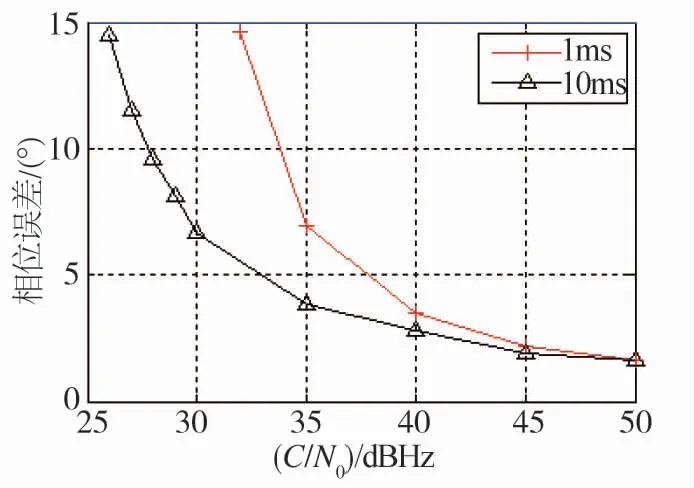
图7 带宽3Hz多普勒频移辅助二阶环路1σ相位误差Fig.7 The phase error of the doppler assisted second order loop with the bandwidth of 3Hz
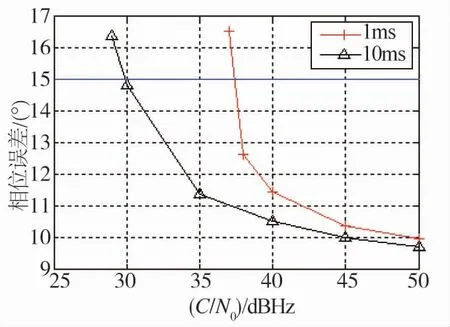
图8 带宽1Hz多普勒频移辅助二阶环路1σ相位误差Fig.8 The phase error of the doppler assisted second order loop with the bandwidth of 1Hz
从图中可以看出:
1)C/N0值在40~50dBHz时,各种带宽下,预检测积分时间1ms和10ms相比,环路相位误差差别较小。这是因为卫星信号信噪比较高,此时环路噪声抑制效果体现不明显。
2)C/N0值在40dBHz以下时,预检测积分时间为10ms时环路相位误差比1ms时小。这是因为延长预检测积分时间可以提高环路噪声抑制效果,Nms相比1ms相干累积,可提高信噪比约10lg(N)dB[5]。
3)减小带宽,不一定能够降低环路相位误差。这是因为虽然减小带宽可以降低热噪声,但环路中仍残留部分动态,由动态引起的相位误差在带宽减小过程中会逐渐增大,并起主导作用。
由上述分析,载波环为二阶,环路带宽为3Hz,预检测积分时间为10ms是最优环路参数,环路可跟踪信号C/N0最低至26dBHz。而三阶载波环路,环路带宽18Hz,预检测积分时间1ms的无辅助环路最低跟踪信号C/N0约为35dBHz。所以采用辅助算法,在不降低动态性能的同时,C/N0门限降低9dBHz,弱信号跟踪能力极大提高。而且环路在辅助下,LEO卫星大部分动态被消除,选用二阶环路比三阶环路,结构更简单,运行更稳定、可靠。
图9所示为预检测积分时间10ms,不同噪声带宽下,信号C/N0值30dBHz时,多普勒频移辅助二阶环路的相位误差。

图9 不同带宽时多普勒频移辅助二阶环路1σ相位误差Fig.9 The phase error of the doppler assisted second order loop with different bandwidths
由图9分析可知,环路带宽最优值约为3Hz时,此时相位误差最小;环路带宽大于3Hz时相位误差主要由热噪声引起;当环路带宽小于3Hz时,相位误差主要由残留动态引起。
5 结论
本文研究利用轨道参数预测LEO卫星的位置、速度,并以此为基础预测LEO卫星的多普勒频移,进而用于辅助星载GPS接收机载波跟踪的问题。借助多普勒频移的辅助,可以降低环路中的动态,能够构建低阶数、窄噪声带宽、长预检积分时间的跟踪环路,从而有利于提高跟踪灵敏度、增强环路跟踪的稳定性。本文用此方法对仿真数据进行了处理,结果表明,预测时间段T为1s,在多普勒频移的辅助下,用二阶、噪声带宽大约为3Hz、预检测积分时间N为10ms的跟踪环路设计时,在弱信号环境下具有最优的跟踪效果。
另外,与LEO卫星相比,中、高轨道航天器如GEO卫星、GTO(大转移轨道)卫星的GPS信号接收环境更差。GEO、GTO卫星接收的GPS可见星更少,同时GEO卫星还需要接收地球另一面的GPS信号,由于距离远,信号衰减严重,GPS信号接收处理难度非常大,极大地限制了GPS在中、高轨道卫星中的应用。在此类应用环境下,本文提出的方法也为GEO、GTO星载高性能GPS接收机的研制提供了一种很有价值的参考思路。
参考文献
[1] 吴文启.惯性辅助的高动态GNSS基带信号跟踪技术[D].长沙:国防科学技术大学,2013.
[2] 陈灿.IMU辅助GPS接收机载波环路跟踪算法研究[D].重庆:重庆大学,2015.
[3] 李育龙,左启耀,李峰.高动态下惯性加速度辅助三阶锁相环性能分析[J].导航定位与授时, 2015,2(3):74-79.
[4] Chiou T Y, Alban S, Atwater S, et al. Performance analysis and experimental validation of a Doppler-aided GPS/INS receiver for JPALS applications[C]//Proceedings of the ION GNSS 17thInternational Technical Meeting of the Satellite Division of the Institute of Navigation. Long Beach, 2004:1609-1618.
[5] Tsui J B Y. Fundamentals of global positioning sys-tem receivers: a software approach[M]. USA:John Wiley,2005.
[6] Space and Missile Systems Center, Navstar GPS Joint Program Office. Navstar GPS space segment/navigation user interfaces[S]. EI Segundo,CA,2004.
[7] 王霞迎,秘金钟. GPS广播星历位置、速度和钟差精度分析[C]//中国测绘学大地测量专业委员会年会. 大连, 2013.
[8] 杨嘉犀,范剑峰.航天器轨道动力学与控制[M].北京:中国宇航出版社,1995.
[9] 孙华丽, 张政治. 全球定位系统卫星位置计算中插值方法精度分析[J]. 导航定位学报, 2013, 1(3):93-97.
[10] Korvenoja P,Pinche R. Efficient Satellite Orbit Approximation[C]// Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation. Salt Lake City, 2000:1930-1937.
