带有执行器约束条件的模糊自适应反步控制
2018-05-21,,,
,,,
(火箭军工程大学三系,西安 710025)
0 引言
由于高超声速飞行器速度快、突防能力强,一直以来就是各国研究的重点,但是由于它强非线性、强耦合的特点,使得研究起来存在较大的困难。文献[1]针对当今高超声速飞行器的研究及发展现状,从多方面分析了这一课题的难点以及未来的发展趋势。文献[2]提出了一种基于径向基函数(Radial Basis Function, RBF)神经网络调参的滑膜变结构控制器,以此在保证飞行器稳定性与鲁棒性的同时,克服执行机构的抖振问题。文献[3]提出了一种基于间隙度量的大包线滞后切换线性变参数(Linear Parameter Varying,LPV)控制方法,并在此方法上设计LPV控制器,从而改善控制器的控制性能和鲁棒性能。文献[4]设计了高超声速飞行器改进自抗扰跟踪控制器,将系统内耦合项当作扰动处理,并进行解耦,最终证实控制性能明显优于经典自抗扰控制器,但是所设计的控制器具有局限性,对条件要求较严格。文献[5]研究了高超声速飞行器的纵向控制问题和倾斜转弯控制问题,设计了基于反步法的全局积分滑膜解耦控制方法。上述文章主要针对控制器的鲁棒性进行了深入而广泛的研究,但是没有考虑舵的动态特性。文献[6]中对研究舵的动态特性的必要性进行了阐述以及理论分析。
本文通过分析高超声速飞行器纵向模型的特点,为了便于研究,基于合理假设,对模型进行了适当的简化,使其转化为严反馈的形式。然后采用动态逆的方法设计速度控制器对速度指令进行跟踪。在考虑舵的动态特性的情况下,结合指令滤波器采用Backstepping的控制方法,对高度指令进行跟踪。并且在设计的控制器中,采用模糊自适应的方法在线辨识模型中含有不确定性参数的函数。最后通过Lyapunov理论验证所设计控制器的稳定性并通过仿真实验进行仿真,仿真说明设计的控制算法在速度与高度控制中具有较好的跟踪性与较强鲁棒性。
1 高超声速飞行器的模型及其严反馈形式
1.1 高超声速飞行器的纵向模型
本文只考虑其纵向模型的控制设计,高超声速飞行器在地面惯性坐标系下的纵向平面的运动方程如下:
(1)
(2)
式中,βc为控制器的输出控制指令。
1.2 高超声速飞行器的严反馈形式
参考文献中的假设条件,得到高超声速飞行器的严反馈形式, 定义x=[x1,x2,x3,x4]T,x1=h,x2=γ,x3=α+γ,x4=q,u=δe,高超声速飞行器纵向运动方程可改写为严反馈形式:
(3)
式中:
f1=0,g1=V
f3=0,g3=1
2 控制器设计
2.1 Backstepping高度控制
下文将结合Backstepping法和二阶非线性指令滤波器对控制器进行设计:
第一步:设计虚拟控制信号x2d。
考虑模型纵向严反馈系统的第1个子系统
(4)
(5)
式中,x2f为避免代数环问题而经过的Butterworth低通滤波器而产生的滤波值,下文中的x3f、x4f以及uf均为滤波值,设计虚拟控制信号
(6)
其中,k1为正的系统设计参数,为了在后续的设计过程中,使控制信号满足受限的要求,定义扩展跟踪误差状态变量z11,设
z11=z1-ξ1
(7)
式中,变量ξ1由式(8)给出
(8)
式中,变量ξ2与x2c将在下一步的设计中给出。

(9)
(10)

第二步:设计虚拟控制信号x3d。
考虑模型纵向严反馈的第2个子系统
(11)
定义跟踪误差z2=x2-x2c,由于式中含有未知函数,故建立如下所示的模糊系统
(12)
设虚拟控制信号
(13)

z22=z2-ξ2
(14)
式中,变量ξ2由式(15)给出
(15)
式中,变量ξ3与x3c将在下一步的设计中给出。

(16)
(17)

第三步:设计虚拟控制信号x4d。
考虑模型纵向严反馈系统的第3个子系统
(18)
定义跟踪误差z3=x3-x3c,同理,设计虚拟控制信号
(19)
其中,k3为正的系统设计参数,同理定义扩展跟踪误差状态变量z33,设
z33=z3-ξ3
(20)
式中,变量ξ3由式(21)给出
(21)
式中,变量ξ4与x4c将在下一步的设计中给出。
第四步:设计虚拟控制信号uc。
考虑模型纵向严反馈的第4个子系统
(22)
定义跟踪误差z4=x4-x4c,由于式中含有未知函数,所以设虚拟控制信号
(23)
其中,k4为正的系统设计参数,上一步中的ξ4由式(24)得出
(24)
同样地,定义扩展跟踪误差状态变量z44,设
z44=z4-ξ4
(25)
为了使控制器的执行机构满足动态特性,仍然将设计的虚拟控制信号ud通过指令滤波器得到满足实际要求的实际控制信号uc。
2.2 动态逆速度控制
将纵向平面运动方程的第一个式子改写为
(26)
式中,gv(x1,x2,V)>0。给定有界跟踪轨迹Vd,系统的动态逆控制律为
(27)
式中,zv=V-Vd。
(28)
自适应律为
(29)
容易证明系统的跟踪误差与参数估计误差是一致终值有界的。
3 稳定性证明
上文中结合指令滤波器和模糊逻辑系统,设计了受限系统的自适应反步控制器,本节将对所设计的控制器的稳定性进行证明。
考虑Lyapunov函数如下

(30)
求导得
(31)
代入z11的动态特性
(32)
式中,ΔGi=(gi-1)(xi+1-xi+1f),ΔG4=(g4-1)(u-uf)。

根据Young’s不等式以及假设5,可得
(33)
则
(34)
继续化简得
(35)
根据Young’s不等式和参数自适应律,可得:
(36)
(37)
则可得出
(38)
同理,根据其他变量的动态特性可得

(39)

(40)
那么式(40)变换为

(41)
由上述Lyapunov稳定性理论可知,上述闭环系统状态及跟踪误差是闭环有界的。当选取合适的控制器参数时,系统跟踪误差收敛于零附近的一个很小的邻域内。
4 仿真分析
用Matlab软件对高超声速飞行器在初始高度110000ft,速度15马赫的巡航条件下的飞行情况进行仿真分析,控制的目标是飞行器在满足执行器(舵)的动态特性的条件下跟踪给定的高度指令和速度指令。系统状态以及执行器(舵)的动态特性如表1所示。
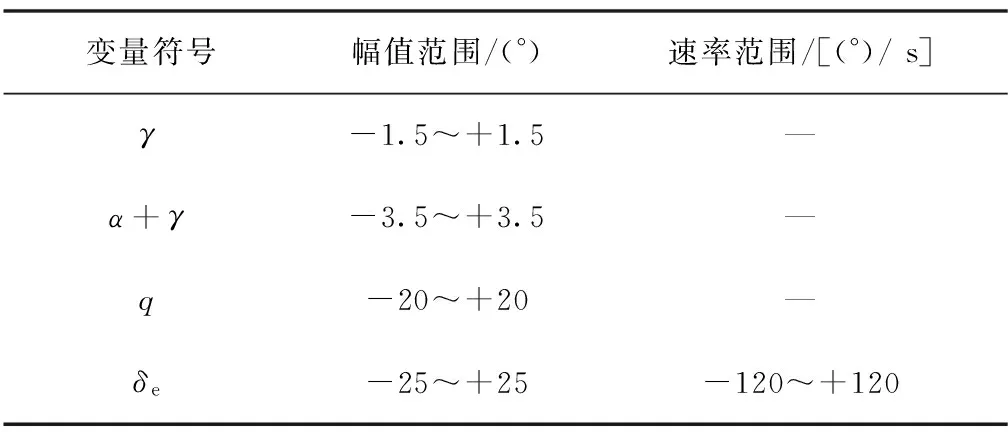
表1 系统状态以及执行器(舵)的动态特性
所设计的控制器的参数选择为:k1=5,k2=4,k3=2,k4=10,kv=0.01,ΓV=0.0005,Γ21=0.0005,Γ22=0.0005,Γ41=0.0005,Γ42=0.01。还需考虑系统参数的一些扰动[12],可参考文献[11]。
系统跟踪高度指令hd=110200,速度指令Vd=15160。仿真图如图1~图5所示。
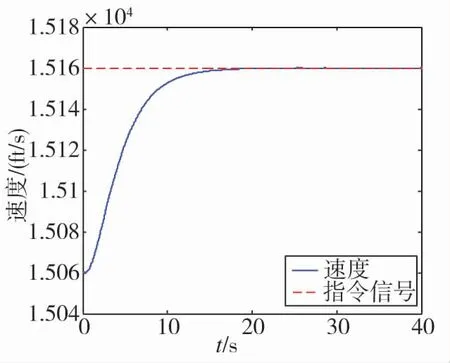
图1 速度跟踪曲线Fig.1 Speed tracking curve
图1所示为速度跟踪曲线,图2所示为高度跟踪曲线,由仿真图可以看出,跟踪效果满足要求;图3所示为舵偏角变化,图5所示为舵偏角速率变化,从仿真图中可以看出,舵偏角在±18°范围内,小于表1中对舵偏角幅值的要求,并且从图5中还可以看出,舵偏角速率变化在±114°变化范围内,满足表1中对舵偏角速率变化要求。所以可以验证,所设计的控制器在满足舵的动态特性的前提下可以较好地跟踪速度和高度。
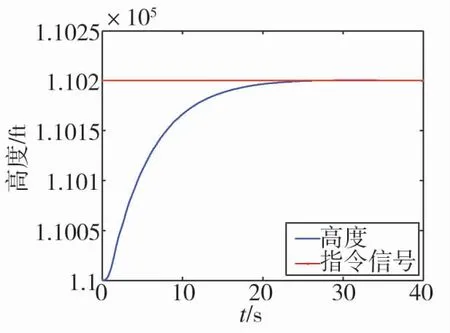
图2 高度跟踪曲线Fig.2 Height tracking curve
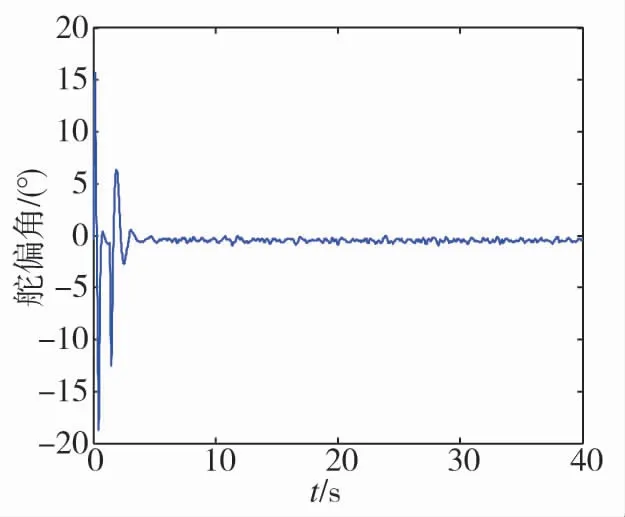
图3 虚拟舵偏角变化Fig.3 Virtual rudder deviation

图4 油门开度Fig.4 Throttle opening
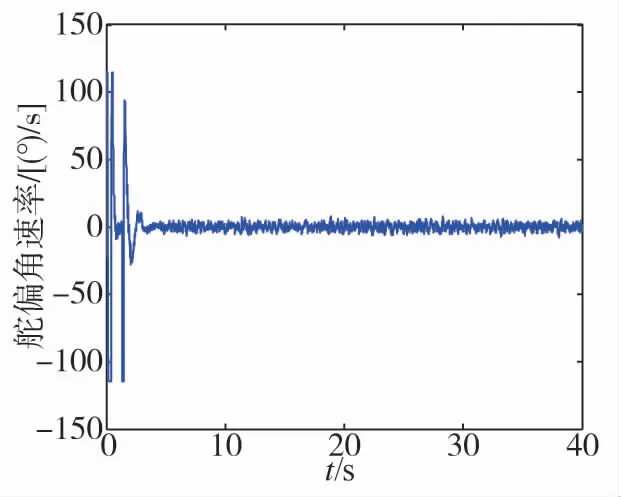
图5 舵偏角速率Fig.5 Rate of rudder angle
5 结论
本文针对高超声速飞行器在存在外界干扰并考虑执行器(舵)动态特性的情况下,设计了基于动态逆的速度控制器和基于指令滤波器的Backstep-ping高度控制器。并且最后通过Matlab软件进行仿真,仿真结果表明所设计的控制器可以很好地跟踪速度与高度并满足执行器(舵)的动态特性。由于本文中使用了模糊系统在线逼近未知参数,辨识参数相对较多,以此在后续的研究中将结合其他方法降低计算量。
参考文献
[1] 方洋旺, 柴栋, 毛东辉,等. 吸气式高超声速飞行器制导与控制研究现状及发展趋势[J]. 航空学报, 2014, 35(7):1776-1786.
[2] 王建敏, 董小萌, 吴云洁. 高超声速飞行器 RBF 神经网络滑模变结构控制[J]. 电机与控制学报, 2016, 20(5):103-110.
[3] 张增辉, 杨凌宇, 申功璋. 高超声速飞行器大包线切换LPV控制方法[J]. 航空学报, 2012, 33(9):1706-1716.
[4] 邱搏搏. 高超声速飞行器改进自抗扰控制方法研究[D]. 哈尔滨:哈尔滨工业大学, 2014.
[5] 熊柯. 高超声速飞行器巡航控制技术研究[D]. 长沙:国防科学技术大学, 2012.
[6] 王倩. 高超声速飞行器飞行控制系统设计方法与仿真研究[D]. 上海:复旦大学, 2011.
[7] 王永超, 张胜修, 曹立佳,等. 输入受限的非线性系统自适应模糊backstepping控制[J]. 控制理论与应用, 2015, 32(12):1669-1675.
[8] 高道祥, 孙增圻, 罗熊,等. 基于Backstepping的高超声速飞行器模糊自适应控制[J]. 控制理论与应用, 2008, 25(5):805-810.
[9] 周砚龙, 陈谋. 基于干扰观测器的输入受限非线性系统鲁棒控制[J]. 南京理工大学学报(自然科学版), 2014, 38(1):40-47.
[10] 李惠峰. 高超声速飞行器制导与控制技术[M]. 北京:中国宇航出版社,2012.
[11] Xu B, Sun F, Yang C, et al. Adaptive discrete-time controller design with neural network for hypersonic flight vehicle via back-stepping[J]. International Journal of Control, 2011, 84(9): 1543-1552.
[12] Xu H, Mirmirani M D, Ioannou P A. Adaptive sliding mode control design for a hypersonic flight vehicle[J]. Journal of Guidance, Control, and Dyna-mics, 2004, 27(5): 829-838.
[13] 王永超, 张胜修, 曹立佳,等. 控制方向未知的输入受限非线性系统自适应模糊反步控制[J]. 系统工程与电子技术, 2016, 38(9):2149-2155.
[14] Sonneveldt L, Chu Q P, Mulder J A. Nonlinear flight control design using constrained adaptive backstepping[J]. Journal of Guidance Control & Dynamics, 2012, 30(2):322-336.
[15] 王永超, 张胜修, 扈晓翔,等. 可规定性能的输入受限非线性系统反步控制[J]. 哈尔滨工业大学学报, 2016, 48(10):110-118.
