基于WiFi指纹库的室内定位研究进展和展望
2018-05-21赵龙,陶冶
赵 龙,陶 冶
(1.北京航空航天大学 自动化科学与电气工程学院,北京 100191;2.北京航空航天大学 数字导航中心,北京 100191)
0 引言
位置服务(Location Based Services,LBS)是一种与空间位置有关的新型服务业务。位置信息反映了人们所处的三维空间环境,是移动应用的基础。随着全球定位系统(Global Positioning System,GPS)、北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)、Galileo卫星导航系统(Galileo Satellite Naviga-tion System)和GLONASS(Global Navigation Satellite System)的投入使用,室外定位技术日趋成熟,已广泛应用于军用和民用领域,并取得了巨大的经济和社会效益。卫星定位主要是依靠视距(line-of-sight)下的三边定位[1],但工业界和学术界共同关注的焦点:在全球导航卫星系统(Global Navigation Satellite Sys-tem, GNSS)信号中断环境下的定位、导航与授时(Positioning, Navigation and Timing,PNT)技术问题尚未得到解决[2],而且其中最难解决的问题——室内定位技术,一直未能获得根本性的突破[3]。室内定位是导航系统的“最后一公里”,是一个热门研究课题。在室内环境下,由于其复杂的空间架构,存在大量的非视距(non-line-of-sight),导致卫星定位在室内环境下的定位结果变差,而此时室内的许多信号,例如蓝牙[4]、WiFi[5]和UWB[6]等,已被用在室内定位领域,而且在某些应用领域取得了突破性的进展[7]。国内外多家公司也都推出了自己的定位技术,例如:苹果公司研发的低功耗蓝牙iBeacon定位技术、谷歌公司研发的机器视觉定位技术、百度携手芬兰IndoorAtlas公司推出的基于地磁匹配的室内定位方案、Ubisense公司推出的超宽带定位技术和WiFiSLAM公司推出的WiFi定位技术等。综合考虑室内环境复杂特性和技术成本等因素,WiFi信号成为目前关注较多的室内定位信号源,基于WiFi指纹库定位的方法更是成为目前最受欢迎的室内定位技术之一,而且基于WiFi指纹库的定位方法引起了大量专家学者的研究[8-9],因为该方法在信源(Access Point,AP)与定位终端间非视距的情况下依然可以达到较高的定位精度。
WiFi信号是基于IEEE 802.11系列通信协议[10]的无线局域网技术。传统的WiFi指纹库定位方法分为2个阶段,第一阶段是离线指纹库构建;第二阶段是移动终端在线定位。图1所示为指纹库定位的3个步骤如图1所示,其中图1(a)在试验区域中采集参考点的WiFi接收信号强度(Received Signal Strength,RSS),使每一个参考点都具有自己独特的WiFi信号强度向量,并将这些向量存储起来,作为构建指纹库的一部分;图1(b)和图1(c)是通过移动设备接收实时的WiFi信号,并将这些信号通过无线广播传送至定位服务器,定位服务器根据相关的相似性准则将该实时信号与指纹库中的信号进行比较,得到移动终端的空间位置。
根据美国环境保护局的报告统计,人们有70%以上的时间是在室内度过[11]。因此准确实现室内定位具有非常重要的科学意义和实用价值。虽然WiFi指纹库定位技术还不够成熟,但在整个室内定位技术架构中是十分重要的。目前,基于WiFi指纹库的室内定位技术面临的主要挑战有:
1)在大范围实施指纹库构建时,需要投入较多的人力去完成数据采集,而且重复性工作多,造成了人员和时间的浪费;
2)线下指纹库建立后,指纹库无法自动实时地反映当前环境变化,即环境发生变化后,需要重新采集指纹库来适应变化后的环境;
3)当线下指纹库形成后,一旦环境发生变化,在线侦测到的WiFi信号强度向量会与指纹库中的信号强度向量产生偏差,导致定位精度下降,甚至无法提供可供参考的定位结果;
4)WiFi信号强度受硬件配置影响明显,不同的移动设备采集到的信号强度不完全相同,当在线采集数据的终端和指纹库采集所使用的终端硬件不完全相同时,会导致其定位精度下降;
5)WiFi信号发射器自身发射信号的不稳定性以及复杂的室内环境造成的噪声干扰,会影响以特征相似性匹配为基本原理的定位方法的定位精度。
许多研究机构已经开展了大量的WiFi指纹库定位研究工作,而且多家商业巨头都参与了实际应用系统研发,取得了阶段性的进展[12-14]。目前使用WiFi指纹库进行定位较成熟的系统有RADAR[15]和Horus[16],定位精度为2~5m。本文旨在介绍目前WiFi指纹库定位的方法理论,使读者能够了解该技术的发展现状;同时,对WiFi指纹库定位技术的未来发展趋势进行分析和展望。
1 WiFi指纹库定位技术发展现状
WiFi室内定位已有大量专家学者进行研究,本节将根据现有WiFi指纹库定位中存在的主要问题,着重介绍现有的解决方法及关键技术。
1.1 WiFi信号特性
WiFi指纹库定位主要依靠终端采集到的信号强度与线下构建的指纹库进行相似度分析,得出定位结果。因此,对于WiFi信号特性研究是使用WiFi信号进行定位的前提。WiFi信号在传播过程中易受多径和环境的干扰[17],这一特性导致测距交汇的三边定位方法无法使用信号衰减模型进行准确的测距,导致定位精度降低;由于人体的不同朝向,可以影响信号强度的变化,甚至可以直接决定是否接收到信号[18],所以在离线采集指纹库的过程中,需要保证同一指纹库的采集端朝向相同。而在指纹库采集过程中,由于同一位置点处同一AP的信号强度相差较大,甚至超过20dBm[17],所以在建库过程中,需对采集的信号强度进行可靠性评估,剔除可靠性较差的信号强度,保证指纹库的可靠性和定位精度。WiFi信号的相关特性指明了指纹库定位的总体方向。本文针对WiFi信号的空间特性进行了相关测试,分析人体不同朝向和不同环境对WiFi信号强度的影响,结果如图2所示,其中纵轴为信号强度;横轴为采集点索引,其大小表征采集点距同一AP的远近,实际距离为索引号乘以1.2m。
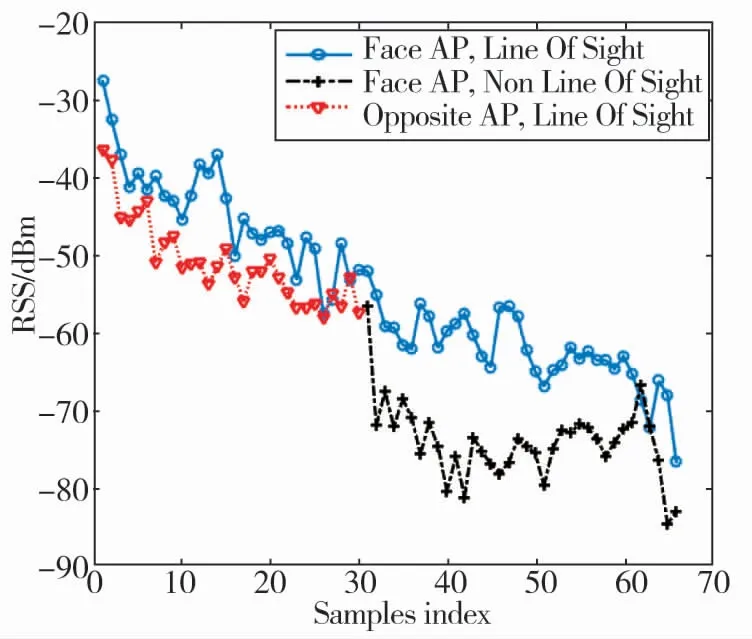
图2 不同朝向和不同环境对于WiFi信号强度的影响Fig.2 Effect of different orientations and environment on WiFi signal strength
图2中,蓝色折线表示采集信号人员面朝AP,且与AP保持无障碍视距;红线表示采集信号人员背朝AP,但与AP之间是无障碍视距;黑线表示采集信号人员面朝AP,与AP之间有障碍非视距。这组实验也验证了文献[17-18]中的部分研究结果。WiFi信号的空间传播特性呈现为WiFi信号强度与空间距离近似符合对数衰减模型,可使用的拟合模型有多种[19-23],图2所示实验结果也验证了对数衰减模型的正确性,对数衰减模型的表达式为
(1)

WiFi信号自身在同一位置的强度波动性反映了时间特性,目前对于WiFi时间特性的研究,大多数学者认为WiFi信号的时间特性呈现正态分布[24],而实际上WiFi的时间特性并不完全呈现正态分布,而是存在多模态,甚至是偏态分布[17-18]。在实际的定位过程中,很多研究人员几乎都是将WiFi信号强度按服从正态分布进行处理,且取强度均值作为信号特征。但实际上信号强度的多模态、偏态分布带来的问题是如果只使用均值作为信号特征,会导致信号特征提取上出现偏差,导致定位精度下降。信号强度多模态问题以及多模态对WiFi指纹库定位精度影响的研究工作尚属空白,因为现有文献将信号强度按正态分布处理,而且相对于WiFi指纹库自身3~5m的定位精度,由多模态问题导致的定位误差较小。因此,在实际应用中,为进一步提升WiFi指纹定位性能,通过对信号强度多模态问题进行实验研究,定性和定量分析其对WiFi指纹定位精度和性能的影响程度是必要的。
1.2 WiFi指纹库的构建方法
指纹库构建是整个WiFi指纹库定位技术的关键环节,直接影响最终定位结果的性能。最初指纹库构建全部是通过人工以离线采集方式采集数据并进行离线处理,但该工作需投入大量的人力与时间。该问题在大规模指纹库构建时显得更加突出,与WiFi指纹库定位快捷、方便实现的特性并不相符,目前很多学者尝试通过多种不同方法来解决指纹库构建的问题。
压缩感知理论(Compressive Sensing,CS)[25-27]使用较为稀疏的信号强度去恢复完整的信号强度,该理论打破了香农采样理论。这种方法的实现过程,主要围绕着AP筛选和参考点(Reference Point,RP)聚类,但该方法运算复杂度较高。文献[28-29]分别使用了线性模型(决策树)和支持向量机回归(Support Vector Regression,SVR)预测未知点的信号强度,以此来降低建库过程中的人力及时间投入。但文献[28-29]中使用的机器学习算法需要事先采集大量数据构建训练集进行训练,虽然这部分工作通常是离线训练,不会增加在线定位的算法复杂度,但事先采集大量数据依然是较繁重的工作,且使用机器学习算法推断未知点的信号强度仍是一种经验式的结果。文献[30]通过室内环境同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)技术降低指纹库构建的繁琐性,该方法对于室内环境要求较高,不能保证所有室内环境下建图的准确性,不具有普适性。
线下构建指纹库时,无论是通过人工、插值算法或机器学习方法来完成指纹库构建,都无法保证指纹库的长期有效性,这是因为环境变化、基站位置变化会导致WiFi信号及WiFi信号场强分布发生变化。因此,必须隔一段时间重新建立或更新指纹库,以保证其定位精度。文献[31]开发了一些简单硬件,可以通过在部分参考点上布置这些硬件实时采集参考点处的WiFi信号强度,从而使用高斯过程回归模型再辅以WiFi信号衰减模型来预测其他位置处的信号强度,可以自适应地应对由于环境变化而带来WiFi信号变化的问题,但该方法在实际应用中需额外增加硬件,不利于大范围推广应用。文献[32-34]提出众包的方案来更新WiFi指纹库,即通过用户上传平时所采集的数据,在后台筛选出可靠的信号强度进行指纹库更新,该方案是目前研究的热点,且有较高的可靠性。文献[33]通过给终端用户在线定位,用户评判定位满意度,进而决定是否将在线获取的RSS上传到指纹库中进行更新,但该种更新方案受指纹库地标信息误差的影响较明显,而且定位满意度的阈值无法量化。文献[34]通过接收用户反馈数据,利用手机传感器信息和航迹推算信息验证数据的可靠性,并利用动态聚类算法提取可靠的指纹库数据。众包方案能够通过大量实时数据反应当前的室内环境,即时更新数据库以提高定位精度,但构建一个大容量的交互平台是该方法实施的前提。
综上所述,指纹库的构建需要兼顾快速、准确和自适应的特点,但目前尚没有一种方法能够同时满足三项指标。因此,在指纹库构建过程中,虽然三种指标无法同时达到最优,但可以构建一个综合性的指标,使三项指标达到最优化平衡;同时,还需要对指纹库维度与定位精度间的关系进行更深入地研究,以降低指纹库的存储压力和算法的计算时间。
1.3 WiFi指纹库信号匹配准则
不同的WiFi信号指纹库匹配准则其定位结果也不同,主要是由于相似准则的机理不同,且不同匹配准则的适用场景不同。目前大多数的WiFi指纹库定位都是寻找与在线采集到的RSS向量欧式距离最小的空间点,其表达式为[25]
(2)
式中,ri是移动终端在线采集第i个AP的信号强度;Pi(Lj)是指纹库中在Lj位置处接收的第i个AP的信号强度。
除了欧式距离之外,还有余弦相似度[35]和谷本相似度[36]等定位准则,由距离最小定位准则衍生出的算法有K最近邻(K-Nearest Neighbor,KNN)和加权K最近邻(WeightedK-Nearest Neighbor,WKNN)等[37-38]。在KNN方法中,K的取值十分重要,经验取值一般为3或4[39],但对于不同应用场景,尚需进一步评估。文献[39]使用3步方案来更新WKNN方法中的权重信息。
最大概率分布[40]也是重要的信号匹配准则,通过概率估计移动终端的位置,其数学模型表示为
(3)
式中,p(Lj|r1,r2,…,rn)可以通过参数分布得到,一般使用高斯分布或者贝叶斯准则获得。
对于大多数定位系统,RADAR[15]和Horus[16]等均选信号均值作为信号的特征,定位准则几乎是距离最短或概率最大准则,定位精度不高,约在2~5m间,这是因为信号强度均值只能提供接收信号的粗略信息,无法获得信号物理层的更多信息。因此,对于WiFi信号特征选取和特征匹配准则进行深入研究也是未来的研究重点。
文献[41]提出了利用指纹库样本的方差和均值进行定位的方法,该方法通过凸包理论[42]实现定位,虽然该方法较为新颖,比较适用于理论分析,但算法复杂度较高。
1.4 不同移动终端对于信号强度的敏感性
不同移动终端对于相同的AP所感知出的信号强度也不同。这主要是因为不同的移动终端接收信号的硬件不相同,所以对相同信号感知出的强度大小不相同,目前有几种主流的方法处理这一问题[43-47]。为解决此问题,式(1)可进一步改写为
(4)

信号强度差分(Difference of Signal Strength,DIFF)方法不直接将RSS作为指纹库的特征进行保存,而是选取2个RSS之差作为指纹特征[43],其数学模型为
Δpij=p(di)-p(dj)
(5)

双曲位置指纹(Hyperbolic Location Finger-printing,HLF)[44]认为不同手机对信号强度的接受规则不尽相同,但接收的最初WiFi信号(频数)是相同的,该方法使用对数的RSS函数之比作为指纹库特征进行存储,其特征可表示为
(6)
式中,yi∈(0,225),yi∈N,yi与p(di)之间的关系详见文献[49]。HLF以最初接收的WiFi信号(频数)为基础,构建一个指纹库特征,但使用该方法必须保证频数接收的准确性。
针对本节所阐述的几种典型方法,其对比结果如表1所示。
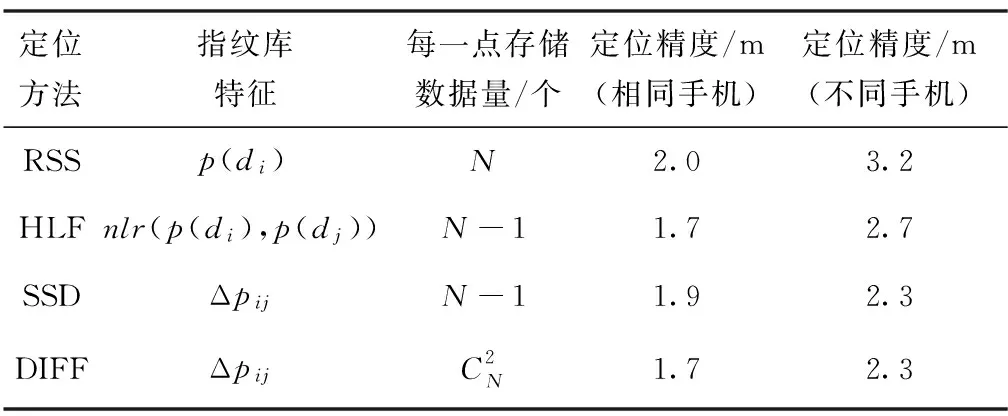
表1 消除设备硬件影响的方法对比
在选用上述方法中的特征进行定位时,虽然可以减弱不同移动终端信号强度特征之间的误差,且定位结果更具鲁棒性。但信号特征维度发生了变化,噪声对定位结果影响更为明显,因此在信号采集与处理过程中如何抑制信号噪声将是重点需要解决的问题。
2 总结和展望
本文通过回顾近年来基于WiFi指纹库的室内定位理论及应用中的关键技术问题,梳理了近年来针对这些问题研究产生的新理论,阐明了这些方法的优势与不足之处。基于WiFi指纹库的室内定位技术的发展趋势将聚焦在以下几个方面。
1)为适应动态应用环境,虽然有学者和研究人员对WiFi室内定位技术和算法进行了研究,并提出了相关理论[32-34],但在实际应用中,仍无法大规模使用,这主要是因为实际过程中不存在真正准确的模型,而且环境对信号强度的影响程度也无法度量。因此,在实际应用中通过模型优化的方式来解决这些问题几乎行不通,通过在线反馈,自主更新的方法将是基于WiFi指纹库的室内定位的研究热点。
2)WiFi基站部署优化问题对WiFi精确定位也是十分重要的,包括如何放置AP[50]和如何选取参考点[51]等问题,优化部署可以通过花费较低的人力、物力和财力获得较好的定位精度;AP部署完成后,如何验证部署结果的唯一性和准确性也是值得关注的热点问题。
3)通道状态信息(Channel State Information, CSI)描述WiFi信号在传播过程中信道的拥堵程度,CSI的值能够反映幅值和子带宽,表征WiFi信号的能力远大于信号强度表征WiFi信号的能力。文献[52-53]通过获取CSI并结合机器学习的相关知识,开展了指纹库定位算法和实际测试的研究,其定位效果较好,鲁棒性也较强。但目前对于CSI的研究尚不够深入,主要是由于CSI并不像RSS一样容易得到,需要使用特定的硬件才能获取。但随着嵌入式处理技术的发展, 将来CSI技术有可能被大规模应用。
参考文献
[1] Buchli B, Sutton F, Beutel J. GPS-equipped wireless sensor network node for high-accuracy positioning applications[C]//European Conference on Wireless Sensor Networks. Springer-Verlag, Berlin, 2012:179-195.
[2] 李冀. 国外提升卫星信号在拒止环境下导航定位能力的新技术[J]. 导航定位学报, 2013, 1(2): 55-59.
[3] Sinel B, Norman M, Grant, et al. FCC seeks comment on cable regulations[J]. Cheminform, 1998, 29(40): 1337-1342.
[4] Liu S, Jiang Y, Striegel A. Face-to-face proximity estimationusing bluetooth on smartphones[J]. IEEE Transactions on Mobile Computing, 2014, 13(4):811-823.
[5] Sun G, Chen J, Guo W, et al. Signal processing techniques in network-aided positioning: a survey of state-of-the-art positioning designs[J]. IEEE Signal Processing Magazine, 2005, 22(4):12-23.
[6] Abdrabou A, Zhuang W. A position-based QoS routing scheme for UWB mobile ad hoc networks[J]. IEEE Journal on Selected Areas in Communications, 2006, 24(4):850-856.
[7] Yang L, Chen Y, Li X Y, et al. Tagoram: real-time tracking of mobile RFID tags to high precision using COTS devices[C]// Proceedings of the 20thAnnual International Conference on Mobile Computing and Networking, 2014: 237-248.
[8] Hatami A, Pahlavan K. A comparative performance evaluation of RSS-based positioning algorithms used in WLAN networks[C]// IEEE Wireless Communications and Networking Conference. IEEE, 2005:2331-2337.
[9] He S, Lin W, Chan S H. Indoor localization and automatic fingerprint update with altered AP signals[J]. IEEE Transactions on Mobile Computing, 2017, 16(7): 1897-1910.
[10] IEEE. Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) specifications, Amendment 4 : Enhancements for Higher Throughput[J]. IEEEN/D Part, 2007.
[11] Weiser M. The computer for the 21stcentury[J]. Mobile Computing and Communications Review, 1999, 3(3): 3-11.
[12] Du Y, Yang D, Xiu C. A novel method for constructing a WIFI positioning system with efficient manpower[J]. Sensors, 2015, 15(4):8358-8381.
[13] Atia M M, Noureldin A, Korenberg M J. Dynamic online-calibrated radio maps for indoor positioning in wireless local area networks[J]. IEEE Transactions on Mobile Computing, 2013, 12(9):1774-1787.
[14] Moghtadaiee V, Dempster A G, Lim S. Indoor local-ization using FM radio signals: A fingerprinting approach[C]// 2011 International Conference on Indoor Positioning and Indoor Navigation. IEEE, 2011:1-7.
[15] Bahl P, Padmanabhan V N. RADAR: an in-building RF-based user location and tracking system[C]// INFOCOM 2000. Proceedings of the 19thAnnual Joint Conference of the IEEE Computer and Communica-tions Societies. IEEE Xplore, 2000:775-784.
[16] Youssef M, Agrawala A. The Horus WLAN location determination system[C]// Proceedings of the 3rdInternational Conference on Mobile Systems, Applications, and Services. ACM, 2005:205-218.
[17] Kaemarungsi K, Krishnamurthy P. Properties of indoor received signal strength for WLAN location fingerprinting[C]// Proceedings of the 1stAnnual International Conference on Mobile and Ubiquitous Systems: Networking and Services. MOBIQUITOUS. IEEE, 2004: 14-23.
[18] Kaemarungsi K. Distribution of WLAN received signal strength indication for indoor location determination[C]// Proceedings of the 2006 1stInternational Symposium on Wireless Pervasive Computing. IEEE, 2006:6.
[19] Smailagic A, Small J, Siewiorek D P. Determining user location for context aware computing through the use of a wireless LAN infrastructure[D]. Institute for Complex Engineered Systems Carnegie Mellon University. Pittsburgh, 2000:15213.
[20] Zou H, Huang B, Lu X, et al. A robust indoor positioning system based on the procrustes analysis and weighted extreme learning machine[J]. IEEE Transactions on Wireless Communications, 2016, 15(2):1252-1266.
[21] Hossain A K M M, Jin Y, Soh W S, et al. SSD: A robust RF location fingerprint addressing mobile devices’ heterogeneity[J]. IEEE Transactions on Mobile Computing, 2013, 12(1):65-77.
[22] Kaya A O, Greenstein L J. A new path loss modeling approach for in-building wireless networks[C]//2012 IEEE Global Communications Conference (GLOBECOM). IEEE, 2012: 5033-5037.
[23] Du Y, Yang D, Xiu C. A novel method for constructing a WIFI positioning system with efficient man-power[J]. Sensors, 2015, 15(4):8358-8381.
[24] Watcharasukchit S, Triyason T, Krathut W, et al. WiFi indoor positioning with binary search method[C]// Proceedings of the 2017 10thInternational Conference on Ubi-Media Computing and Workshops. IEEE, 2017:1-6.
[25] Feng C, Au W S A, Valaee S, et al. Received-signal-strengthbased indoor positioning using compressive sensing[J]. IEEE Transactions on Mobile Compu-ting, 2012, 11(12):1983-1993.
[26] Feng C, Au W S A, Valaee S, et al. Compressive sensing based positioning using RSS of WLAN access points[C]// Proceedings of the IEEE INFOCOM. IEEE, 2010:1-9.
[27] Feng C, Au W S A, Valaee S, et al. Orientation-aware indoor localization using affinity propagation and compressive sensing[C]// Processings of the 2009 3rdIEEE International Workshop on Computational Advances in Multi-Sensor Adaptive. IEEE, 2010:261-264.
[28] Yin J, Yang Q, Ni L M. Learning adaptive temporal radio maps for signal-strength-based location estimation[J]. IEEE Transactions on Mobile Computing, 2008, 7(7):869-883.
[29] Hernández N, Ocaa M, Alonso J M, et al. Continuous space estimation: Increasing WiFi-based indoor localization resolution without increasing the site-survey effort[J]. Sensors, 2017, 17(1):147.
[30] Tang J, Chen Y, Chen L, et al. Fast fingerprint data-base maintenance for indoor positioning based on UGV SLAM[J]. Sensors, 2015, 15(3):5311-5330.
[31] Zou H, Jin M, Jiang H, et al. WinIPS: WiFi-based non-intrusive indoor positioning system with online radio map construction and adaptation[J]. IEEE Transactions on Wireless Communications, 2017, 16(12): 8118-8130.
[32] Zhuang Y, Syed Z, Li Y, et al. Evaluation of two WiFi positioning systems based on autonomous crowdsourcing of handheld devices for indoor navig-ation[J]. IEEE Transactions on Mobile Computing, 2016, 15(8):1982-1995.
[33] 李燕君, 徐凯锋, 邵剑集. 利用众包更新Wi-Fi室内定位指纹库的方法研究[J]. 传感技术学报, 2014(12):1692-1698.
[34] 张熠, 陈璟, 王革超. 一种结合众包的WIFI指纹数据库自构建及更新算法[J]. 小型微型计算机系统, 2017, 38(11):2458-2464.
[35] He S, Chan S H G. Sectjunction: Wi-Fi indoor localization based on junction of signal sectors[C]// IEEE International Conference on Communications. IEEE, 2014:2605-2610.
[36] Jiang Y, Pan X, Li K, et al. ARIEL: Automatic Wi-Fi based room fingerprinting for indoor localization[C]// Proceedings of the 2012 ACM Conference on Ubiquitous Computing. ACM, 2012:441-450.
[37] Honkavirta V, Perälä T, Alilöytty S, et al. A comparative survey of WLAN location fingerprinting me-thods[C]// Proceedings of the 6thWorkshop on Positioning, Navigation and Communication. WPNC 2009. IEEE, 2009:243-251.
[38] Liu H, Darabi H, Banerjee P, et al. Survey of wireless indoor positioning techniques and systems[J]. IEEE Transactions on Systems Man & Cybernetics Part C, 2007, 37(6):1067-1080.
[39] Li D, Zhang B, Li C. A feature-scaling-based k-nearest neighbor algorithm for indoor positioning sys-tems[J]. IEEE Internet of Things Journal, 2016, 3(4):590-597.
[40] Mirowski P, Milioris D, Whiting P, et al. Probabilistic radio-frequency fingerprinting and localization on the run[J]. Bell Labs Technical Journal, 2014, 18(4):111-133.
[41] He S, Chan S H. Tilejunction: Mitigating signal noise for fingerprint-based indoor localization[J]. IEEE Transactions on Mobile Computing, 2015, 15(6):1554-1568.
[42] De Berg M, Van Kreveld M, Overmars M, et al. Computational geometry: algorithms and applications[J]. Mathematical Gazette, 2008, 19(3):333-334.
[43] Dong F, Chen Y, Liu J, et al. A calibration-free localization solution for handling signal strength variance[M]// Mobile Entity Localization and Trac-king in GPS-less Environnments. Springer, Berlin, Heidelberg, 2009.
[46] Hossain A K M M, Jin Y, Soh W S, et al. SSD: A robust RF location fingerprint addressing mobile devices’ heterogeneity[J]. IEEE Transactions on Mobile Computing, 2013, 12(1):65-77.
[47] Zou H, Huang B, Lu X, et al. A robust indoor positioning system based on the procrustes analysis and wei-ghted extreme learning machine[J]. IEEE Transactions on Wireless Communications, 2016, 15(2):1252-1266.
[48] Gower J C. Generalized procrustes analysis[J]. Psychometrika, 1975, 40(1):33-51.
[49] Bardwell J. Converting signal strength percentage to dBm values[J]. 2002.
[50] Hossain A K M M, Soh W S. Cramér-Rao bound analysis of localization using signal strength difference as location fingerprint[C]// Proceedings of the 2010 Conference on Information Communications. IEEE Press, 2010:1981-1989.
[51] Sheng K, Gu Z, Mao X, et al. The collocation of measurement points in large open indoor environment[C]// 2015 IEEE Conference on Computer Communications. IEEE, 2015:2488-2496.
[52] Wang X, Gao L, Mao S, et al. CSI-based fingerprinting for indoor localization: A deep learning approach[J]. IEEE Transactions on Vehicular Technology, 2017, 66(1):763-776.
[53] Yang Z, Zhou Z, Liu Y. From RSSI to CSI: Indoor localization via channel response[J]. ACM Compu-ting Surveys, 2013, 46(2):1-32.
