足底驱动型下肢康复机器人的运动学建模与轨迹跟踪控制研究
2018-05-18谢胜龙梅江平刘海涛
谢胜龙,梅江平,刘海涛
(天津大学机构理论与装备设计教育部重点实验室,天津 300350)
中风、脊髓损伤和脑外伤是导致下肢运动障碍的主要原因[1].医学理论和临床医学证明,由于大脑具有可塑性,故对于脑卒中和神经损伤导致的运动功能障碍患者,除及时有效的手术治疗和必要的药物治疗外,采用科学的康复训练对于肢体运动功能的恢复与重建具有显著的效果[2].传统的康复训练主要依赖于物理治疗师的手动辅助操作,除耗时、成本高外,还难于达到高频率、强度大、针对性强、重复且持续的康复训练要求,且治疗效果依赖于治疗师的技术和经验[3].为了解决上述问题,需要安全、定量、有效及可重复训练的新技术,下肢康复机器人便是在这一需求背景下诞生的,并成为国际机器人领域的一个研究热点[4].
文献[5]提出一种多关节、坐/卧式外骨骼型下肢康复机器人,通过带动人体髋关节、膝关节和踝关节的组合运动,使得该康复机器人几乎可以训练下肢的全部肌肉,从而达到更好的康复治疗效果.文献[6]提出一种冗余驱动的踝关节康复机器人,该机器人具有结构简单与运动学求解简便的优点.文献[7]在分析现有踝关节康复机器人机构特征的基础上,提出一种可以实现踝关节康复运动所需的三自由度转动的踝关节康复机构,该机构具有解析解简单、易于控制的优点.文献[8]提出一种踏板式步行康复机器人,利用机械约束实现步行时踝关节和跖趾关节的运动姿态,训练步态更加符合人正常步行时足部的运动特征.然而,这些机器人多采用刚性驱动机构作为驱动器(电机、气缸等),这种驱动器的刚性特性使得机器人的柔顺性很差,容易在机器人控制中产生不可控的作用力,使得患者在康复过程中感觉不适,甚至会给患者带来二次损伤,因此采用柔性驱动的下肢康复机器人逐渐得到了学者们的重视.文献[9]设计了一种并联踝关节康复机构,因采用绳驱动而避免了刚性杆件的惯性冲击,安全性较高,但其运动学正解较为复杂,且仅能实现踝关节的 3个旋转方向的运动,无法实现下肢的康复运动.文献[10]提出一种基于气动人工肌肉和绳驱动的柔性并联构型的踝关节康复机器人,该机器人可以提供踝关节3个转动方向的康复训练.文献[11]基于绳索驱动方式开发了一款并联构型的步态训练机器人,并对其进行了运动学优化设计.但是,这些机器人要么针对的是踝关节康复机器人,无法提供完整的下肢康复训练,要么因结构设计的问题导致机器人的控制复杂.
因此,笔者提出了一种既能满足柔性驱动,又能保证控制简单的下肢康复机器人[12].为了实现对该机器人控制的仿真,基于模块化思想,将其控制系统划分为系统输入模块、位置逆解模块、单支链驱动控制模块和位置正解模块.首先对该机器人进行结构分析,在此基础上推导出其运动学正逆解模型,构建位置正逆解模块.然后建立人体下肢运动学模型,并将关节角度数据带入该模型中得到足底运动轨迹,在此基础上拟合出足心轨迹和足底背伸/跖屈角对时间的函数表达式,构建出系统的输入模块.接着采用关节空间控制方法结合各子模块构造出下肢康复机器人控制仿真模型.在此基础上,对所建立的系统仿真控制模型进行了仿真.旨在为实现该下肢康复机器人的轨迹跟踪控制提供有效手段.
1 康复机器人机构分析
1.1 机构分析
图 1是本文研究的一种足底驱动下肢康复机器人的三维模型(以下简称 AirGait机构).该机构是一种由气动人工肌肉驱动的 3自由度下肢康复训练装置,可以实现踝关节背伸/跖屈、内翻/外翻两个方向的转动和垂直于地面方向的上下移动,能够提供主动驱动帮助患者进行康复训练.同时,因气动人工肌肉具有柔顺性[13],使得所设计的康复机器人具备柔性驱动的特性,能够很好地减轻患者在康复过程中的不适感,减少二次伤害的风险.

图1 AirGait机构模型Fig.1 Mechanism model of AirGait
该机器人包括内翻/外翻驱动机构和背伸/跖屈驱动机构,采用对称布置的形式.内翻/外翻驱动机构用于实现康复机器人的内翻/外翻运动,由高速开关阀驱动气动人工肌肉沿着导轨上下移动,气动人工肌肉经钢丝绳连接主滑轮,经过减速机后,由减速机输出端的从滑轮通过钢丝绳连接内翻/外翻连杆,驱动动平台做内翻/外翻运动;背伸/跖屈驱动机构用于实现康复机器人的背伸/跖屈运动,由高速开关阀驱动气动人工肌肉沿着导轨上下移动,气动人工肌肉经钢丝绳连接主滑轮,经过减速机后,由减速机输出端的从滑轮通过钢丝绳连接背伸/跖屈连杆,驱动动平台做背伸/跖屈运动;通过同时驱动内翻/外翻驱动机构和背伸/跖屈驱动机构,实现动平台的上下移动;机构中的气压传感器和位移传感器实时采集各个气动人工肌肉内部的气压和伸缩长度,并实时反馈给下肢康复机器人的运动控制系统,通过控制器调节高速开关阀的进气量,从而调节各个气动人工肌肉的长度,使得其长度跟踪期望的长度.
1.2 运动学分析
图 2为 AirGait的机构简图,其中点Bi( i =1,2,3,4)表示各支链中移动副与静平台交点;点 A1、A3、P1、P3为转动副轴线中心;点A2、A4、P2、P4为球铰中心;点O、O ′分别为静、动平台中心.以点O为原点建立参考坐标系K,其中x轴由点O指向点B1,z轴与由点Bi( i =1,2,3,4)张成的平面垂直,y轴满足右手定则.为了描述动平台姿态,在点 O′处建立连体系 K′,其中u轴由点 O′指向点 A1,w轴与由点 Ai( i =1,2,3,4)张成的平面垂直,v轴满足右手定则.于是,系 K′相对系K的姿态可通过首先绕y轴旋转角θ,然后绕u轴旋转角ψ来实现.其中θ对应足底的背伸/跖屈角,ψ对应足底的内翻/外翻角.据此,系 K′相对系K的姿态矩阵可表示为

式中u、v、w分别表示坐标系 K′3个坐标轴的单位矢量.
1.2.1 位置逆解模型
位置逆解分析可以归结为已知机构尺度参数、参考点 O′在系K中的 z坐标分量rz、姿态角θ和ψ,确定驱动关节变量qi( i =1,2,3,4)的问题.如图2所示,在系K下,点 O′的位置矢量r可表示为

式中:qi表示第i个主动移动副的关节变量;z为坐标轴z的单位矢量.由式(2)可得

式中x与y分别为坐标轴x与y的单位矢量.
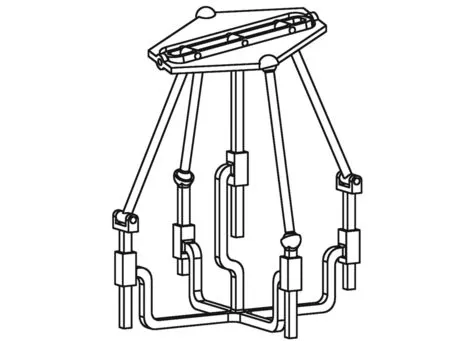
图2 AirGait机构示意Fig.2 Brief mechanism model of AirGait
1.2.2 位置正解模型
位置正解分析是已知各主动移动副的关节变量qi,求解参考点 O′的 z坐标分量rz及姿态角θ、ψ.注意到,该机构中两条 PRR支链和 PR支链构成一平面机构(见图3),故可构造如下约束方程:

化简整理后得


在此基础上,利用式(2)可进一步解得


图3 AirGait背伸/跖屈平面机构示意Fig.3 Brief mechanism of AirGait in dorsal extension/plantar flexion plane
2 人体下肢运动学分析
2.1 人体下肢运动学模型
人体下肢刚体模型如图 4所示.A、B、C 3个点分别为髋关节、膝关节和踝关节的转动中心,D、E分别表示足尖和足跟,C、D、E 3点构成的三角形表示人足,F表示足心;lab表示大腿长度,lbc表示小腿长度.θhip为人体髋关节角度,θknee为人体膝关节角度,θankle为人体踝关节角度,θf为跖屈角,θn为背伸角[14].所建坐标系Oxyz的xy平面处于矢状面,y轴正方向竖直向上,z轴垂直纸面向外,x轴符合右手定则.此时下肢刚体模型中各连杆和标识点在矢状面的运动情况仅与坐标x和y相关,与z轴无关.因此下肢各标识点 A、B、C、D、E、F在矢状面内的运动学方程分别为
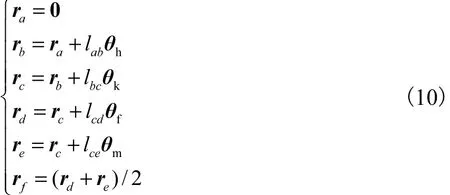
式中 ra~rf分别代表 A~F点的坐标.各角度与连杆之间的几何关系为

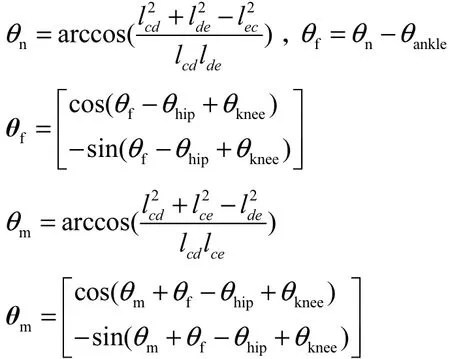
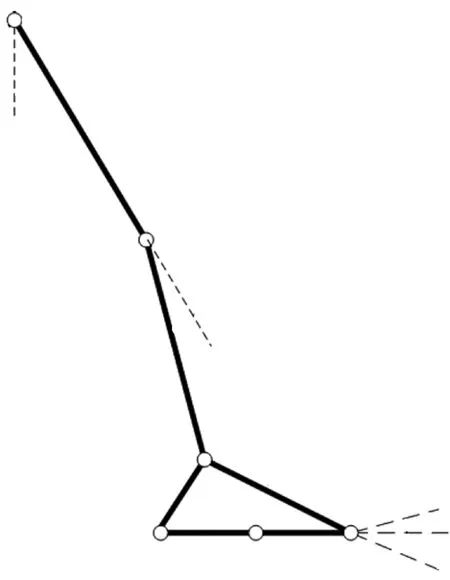
图4 人体下肢刚体模型Fig.4 Rigid model of lower-limb
将髋关节、膝关节和踝关节角度数据带入上述人体下肢运动学模型中,即可得到各标识点的坐标.
2.2 足心轨迹拟合
为了得到足心和背伸/跖屈角的运动轨迹,首先根据文献中给出的髋关节、膝关节和踝关节角度数据,基于人体下肢运动学模型绘制正常人体步行时下肢的棍棒图[15],如图5所示,从而得到足心和背伸/跖屈角的运动轨迹.

图5 正常人体下肢棍棒图Fig.5 Stick image of normal lower-limb gaits
这里采用傅里叶级数对得到的足心和背伸/跖屈角运动轨迹进行拟合,得到其关于时间 t的函数表达式.拟合的函数表达式为式中:x和y分别为足心的横、纵坐标;θ为足底背伸/跖屈角;nx、ny和 nc分别为各待拟合函数的拟合次数,依次取6、8和8.
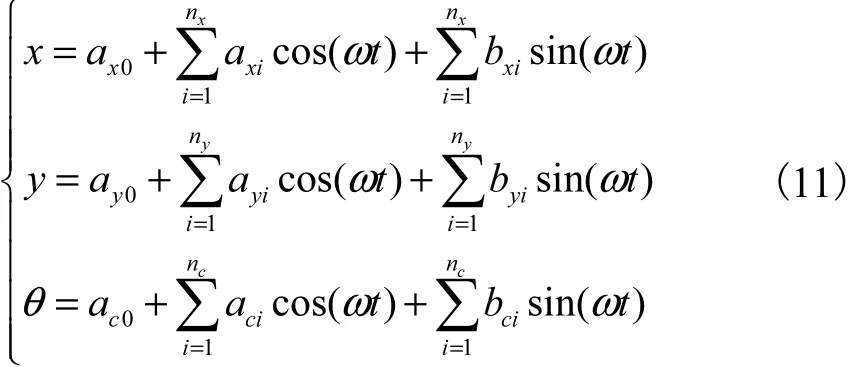
得到的各拟合参数如表1所示,得到的拟合结果如图6~图9所示,其拟合的均方根误差如表2所示.
结果表明,计算得到的各拟合函数的系数能很好地拟合足心的运动轨迹.
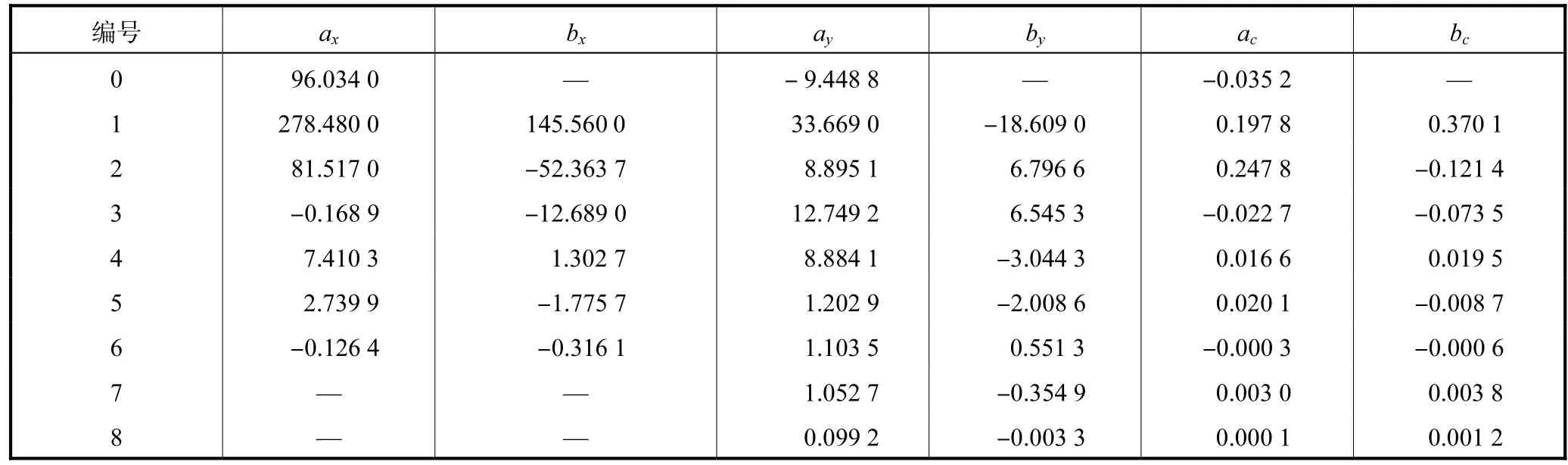
表1 各系数拟合值Tab.1 Fitting results of coefficients
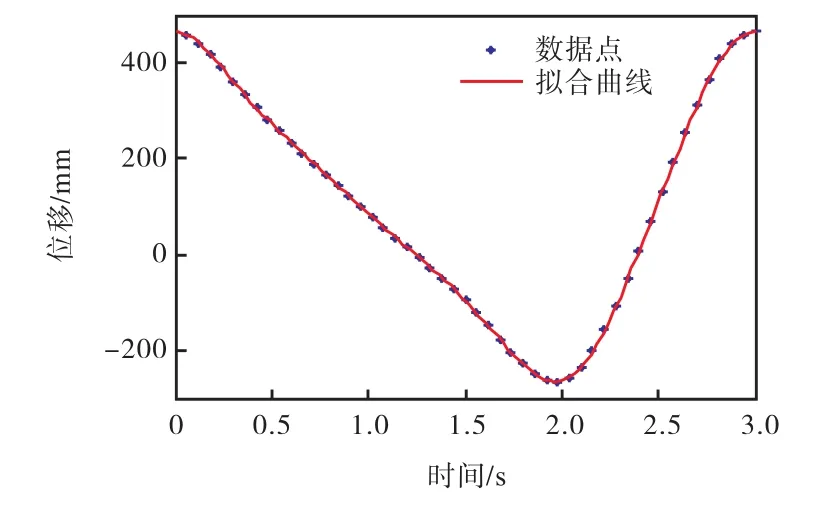
图6 足心横坐标拟合结果Fig.6 Fitting results of foot center abscissa
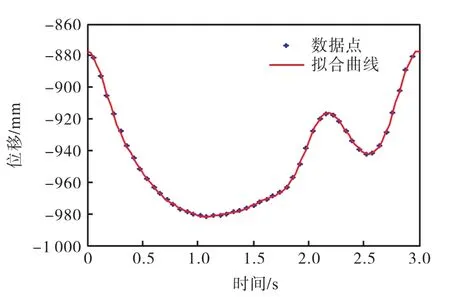
图7 足心纵坐标拟合结果Fig.7 Fitting results of foot center ordinate

图8 背伸/跖屈角拟合结果Fig.8 Fitting results of dorsal extension/plantar flexion angle
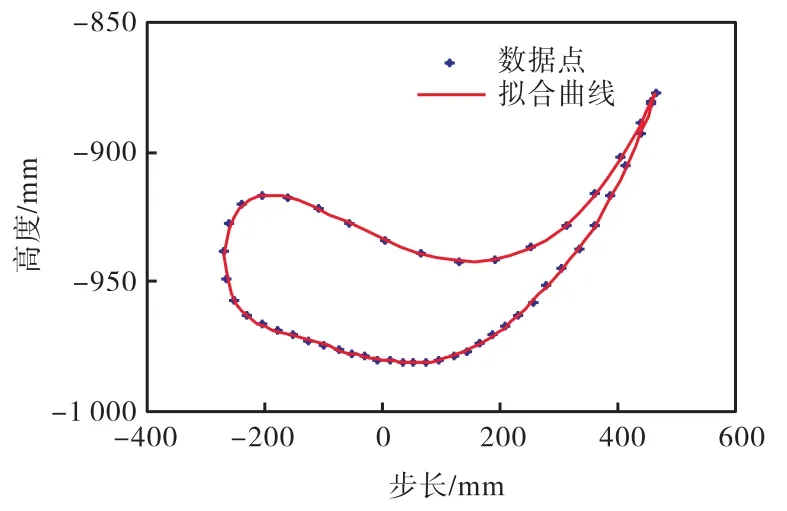
图9 足心轨迹拟合结果 Fig.9 Fitting results of foot center trajectory

表2 拟合均方根误差Tab.2 Fitting errors of RMSE
3 系统仿真分析
3.1 康复机器人控制模型
本文康复机器人的轨迹跟踪控制采用关节空间控制策略[16].每个驱动关节的控制策略采用独立的控制策略,并且每个控制器之间无相互作用.基于关节空间控制器的设计思想是通过提高每个支腿的性能,从而实现整体平台性能的提升[17],其控制策略如图 10所示.对应系统的控制仿真模型如图 11所示.该控制模型主要有如下 4个模块:系统输入模块、位置逆解模块、单支链驱动控制模块和位置正解模块.图 12为单支链驱动控制模块的控制仿真模型.表 3为各元部件型号.
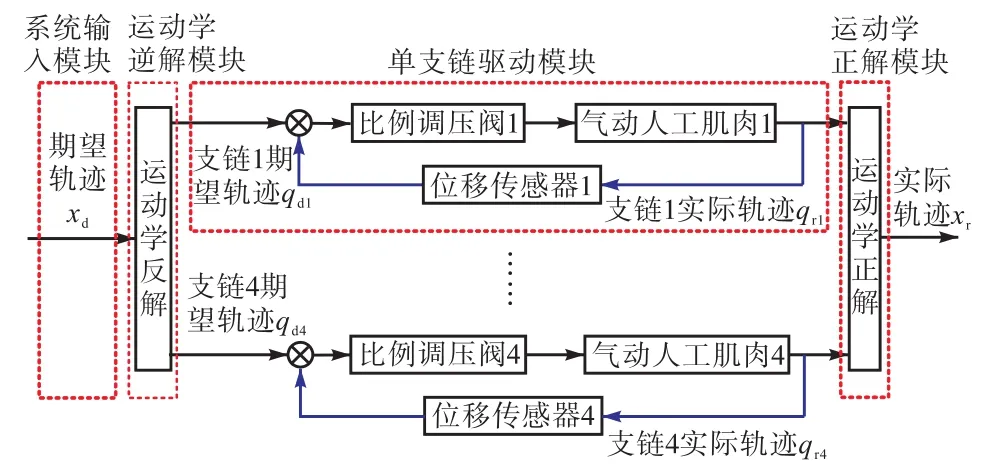
图10 AirGait轨迹跟踪控制策略Fig.10 Trajectory tracking control scheme of AirGait
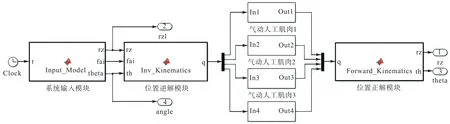
图11 AirGait轨迹跟踪控制仿真模型Fig.11 Simulation model of trajectory tracking control of AirGait

图12 气动人工肌肉轨迹跟踪控制仿真模型Fig.12 Simulation model of trajectory tracking control of pneumatic artificial muscle

表3 各元部件型号Tab.3 Model of each component
给定位姿的轨迹首先经过下肢康复机器人的运动学反解,解算出 4个气动人工肌肉对应的行程量(式(3)),然后将各气动人工肌肉的行程量输入到系统控制单元(图11的气动人工肌肉1~气动人工肌肉4),根据设定的控制律及位移传感器进行反馈 PID控制,输出高速开关阀的控制信号来控制气动人工肌肉的进气量(图 12),从而控制下肢康复机器人按照期望的轨迹运动.为了验证仿真模型的控制效果,将图 11中各气动人工肌肉控制结果输出,作为下肢康复机器人运动学正解的输入模块,经过计算后得到各动平台经过控制后的实际位姿轨迹,通过对比其实际轨迹与期望轨迹,判断模型的控制效果.
单支链驱动控制模块作为整个控制系统的核心模块,其控制性能的好坏直接影响到整个控制系统的控制精度.为此,下面单独介绍该模块.
3.2 单支链驱动控制模块仿真及实验验证
这里单支链驱动控制模块为基于高速开关阀控制的气动人工肌肉反馈 PID控制模块,主要包括气动人工肌肉静态特性模块、气动人工肌肉动态特性模块、电磁阀流量特性模块和信号生成模块.其具体建模与仿真过程已在文献[13,18]中进行了详细论述,本文仅补充其轨迹跟踪控制的实验验证.相关的实验设备和元器件分别见图 13和表 3.图中气动人工肌肉进气端与支架固定相连,另一端可自由移动,位移传感器通过连接板与气动人工肌肉移动端相连,用于实时测量气动人工肌肉运动过程中的长度变化.气压传感器与气动人工肌肉的进气端相连,用于采集其运动过程中的内部气压.数据采集卡嵌入工控机主机箱中,通过模拟量输入通道与位移传感器和气压传感器通讯以实时采集其位移和气压信号,通过数字量输出通道发送 PWM 信号给高速开关阀,控制高速开关阀的通断,进而控制气动人工肌肉的长度变化.

图13 气动人工肌肉轨迹跟踪控制实验平台Fig.13 Experiment setup of trajectory tracking control of pneumatic artificial muscle
这里,被跟踪的轨迹分别为正弦波和阶跃响应,其中正弦波的表达式为

式中 f(t)为被跟踪的轨迹信号.仿真与实验结果如图14~图 19所示.图 14~图 17为正弦波的轨迹跟踪效果和误差,图18和图19为阶跃响应的仿真和实验结果.仿真与实验结果的对比表明,所建立的单通道控制模块的仿真模型具有较好的控制精度.
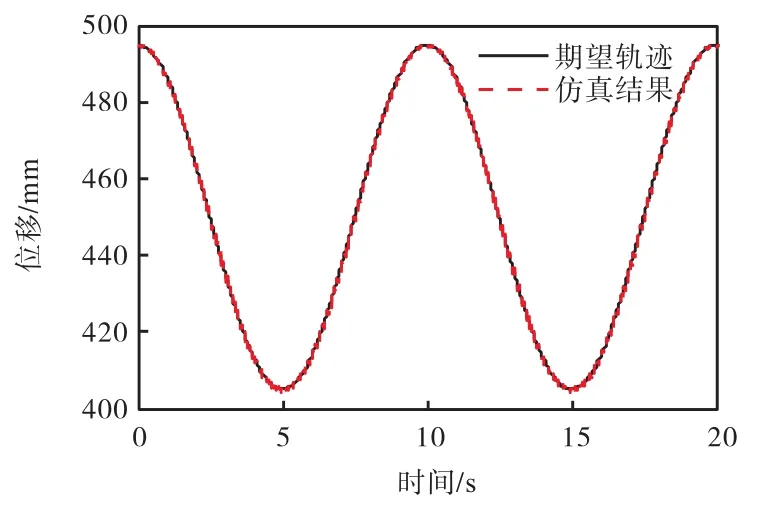
图14 仿真轨迹跟踪效果Fig.14 Trajectory tracking result of simulation

图15 仿真轨迹跟踪误差Fig.15 Trajectory tracking errors of simulation
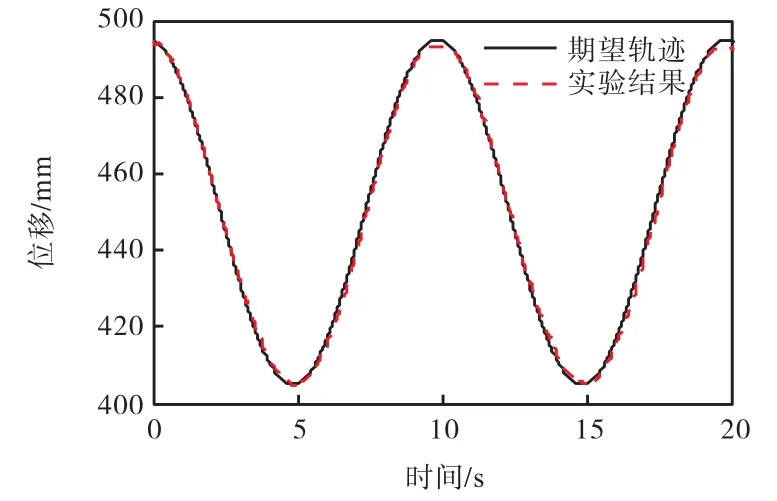
图16 实验轨迹跟踪效果Fig.16 Trajectory tracking result of experiment
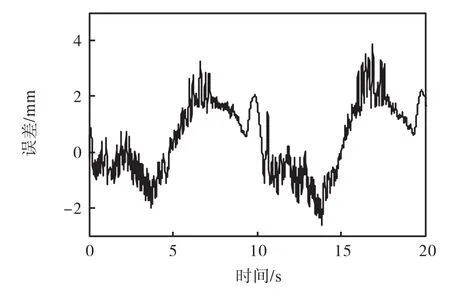
图17 实验轨迹跟踪误差Fig.17 Trajectory tracking errors of experiment

图18 阶跃响应仿真结果Fig.18 Simulated results of step response
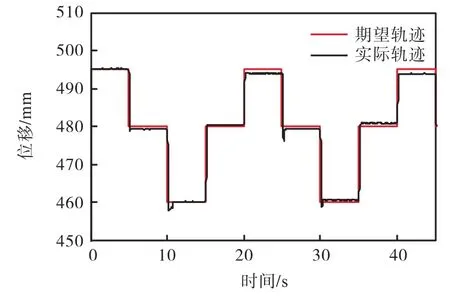
图19 阶跃响应实验结果Fig.19 Experimental results of step response
3.3 康复机器人控制模型仿真分析
这里采用第 2.2节的拟合结果作为下肢康复机器人的输入.系统的输入为参考点 O′在坐标系K中的z坐标分量rz和背伸/跖屈角θ,即

式中:H为 AirGait在初始状态时的高度,这里为460,mm;yt为将关节角带入人体下肢运动学模型得到的棍棒图中足心的纵坐标;y为足心轨迹拟合模型得到的足心纵坐标函数表达式;xd和xe分别为 D 点和 E点横坐标;yd和ye分别为 D点和 E点纵坐标.式(13)和式(14)用于将足心坐标转换到图 2所示的全局坐标系Oxyz下.
仿真结果如图 20~图 23所示.图 20为足心纵坐标轨迹跟踪结果,图 21为其轨迹跟踪误差.仿真结果表明,轨迹跟踪误差整体比较平稳,最大跟踪误差约为 3.5,mm;图 22为足底背伸/跖屈角的轨迹跟踪结果,图 23为其轨迹跟踪误差,最大跟踪误差仅约 0.03,°,表明所建立的仿真控制模型和控制方法具有较好的控制精度.对比图21和图23可见,轨迹跟踪的位移误差较大,这是因为气动人工肌肉难以得到精确的位置控制,其形变/长度与气压/力之间存在强烈的耦合关系,易受多种因素(如各支链间交互作用)的干扰.由于本文提出的控制策略中各支链的运动误差仅由该支链自身的控制纠正,不受其他支链控制调节,而动平台的运动精度同4根支链运动都是相关的,所以动平台的精度因缺少各支链间的同步协调而导致其轨迹跟踪精度降低.后续工作中将会对此控制策略进行改进,以提高机器人的控制精度.
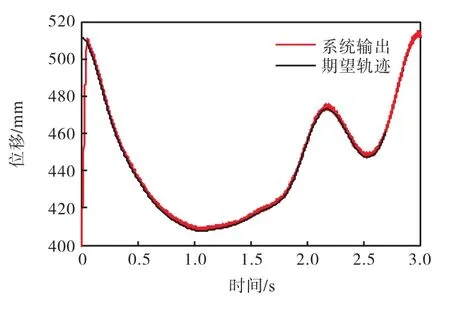
图20 足心纵坐标轨迹跟踪结果Fig.20 Trajectory tracking results of foot center ordinate
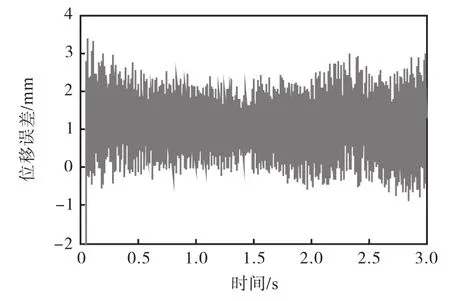
图21 足心纵坐标轨迹跟踪误差Fig.21 Trajectory tracking errors of foot center ordinate
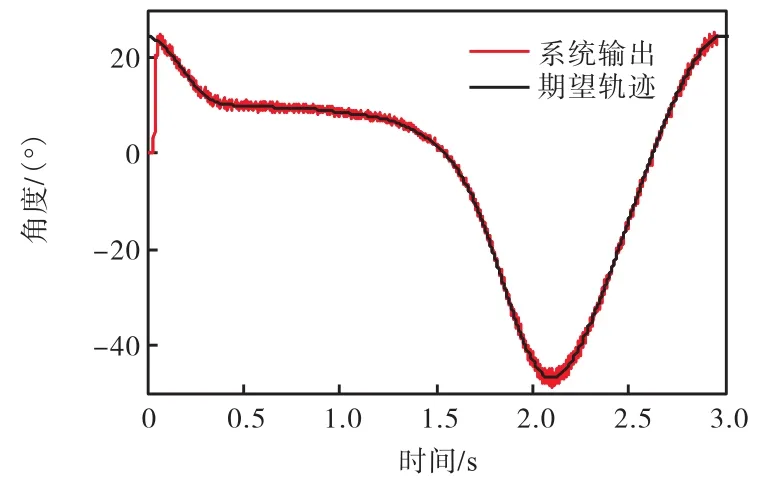
图22 背伸/跖屈角跟踪结果Fig.22 Trajectory tracking results of dorsal extension/plantar flexion angle
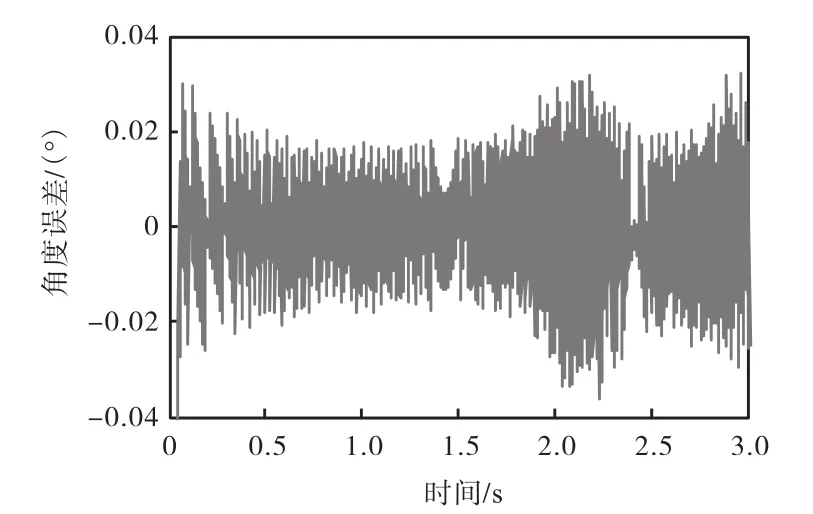
图23 背伸/跖屈角跟踪误差Fig.23 Trajectory tracking errors of dorsal extension/plantar flexion angle
4 结 论
(1) 提出了一种由高速开关阀和气动人工肌肉驱动的足底驱动型下肢康复机器人,可以实现踝关节的背屈/跖屈、内翻/外翻两个方向的转动和垂直于地面方向的上下移动,能够提供主动驱动帮助患者进行康复训练.同时该机构具有结构紧凑、经济实用、使用方便的优点.
(2) 为了实现对该康复机器人的轨迹跟踪控制的仿真,基于模块化思想,将该机器人的控制系统划分为系统输入模块、位置逆解模块、单支链驱动控制模块和位置正解模块,然后采用关节空间控制的方法结合各子模块构造出该下肢康复机器人的控制仿真模型.
(3) 采用实验的方法验证了该仿真模型中关键的模块——单支链驱动控制模块的准确性,从而提高了整机控制仿真模型的可信度.
(4) 对所建立的控制模型进行轨迹跟踪控制的仿真.结果表明,所建立的控制模型能够很好地实现轨迹跟踪控制.本文所建立的该康复机器人轨迹跟踪控制的控制仿真模型与控制方案为其后续实验研究打下了良好的基础.
:
[1] 胡 进,侯增广,陈翼雄,等. 下肢康复机器人及其交互控制方法[J]. 自动化学报,2014,40(11):2377-2390.Hu Jin,Hou Zengguang,Chen Yixiong,et al. Lower limb rehabilitation robots and interactive control methods[J].Acta Automatica Sinica,2014,40(11):2377-2390(in Chinese).
[2] Dzahir M A M. Recent trends in lower-limb robotic rehabilitation orthosis:Control scheme and strategy for pneumatic muscle actuated gait trainers[J].Robotics,2014,3(1):120-148.
[3] Díaz I,Gil J J,Sánchez E. Lower-limb robotic rehabilitation:literature review and challenges[J].Journal of Robotics,2011,2011:759764.
[4] 李醒飞,郑 奇,张国雄. 类人气动肌肉模型与实验研究[J]. 天津大学学报,2005,38(3):242-247.Li Xingfei,Zheng Qi,Zhang Guoxiong. Mathematic model and experimental study of humanoid pneumatic muscle[J].Journal of Tianjin University,2005,38(3):242-247(in Chinese).
[5] 史小华,王洪波,孙 利,等. 外骨骼型下肢康复机器人结构设计与动力学分析[J]. 机械工程学报,2014,50(3):41-48.Shi Xiaohua,Wang Hongbo,Sun Li,et al. Design and dynamic analysis of an exoskeletal lower limbs rehabilitation robot[J].Journal of Mechanical Engineering,2014,50(3):41-48(in Chinese).
[6] Saglia J A,Tsagarakis N G,Dai J S,et al. A Highperformance redundantly actuated parallel mechanism for ankle rehabilitation[J].International Journal of Robotics Research,2009,28(9):1216-1227.
[7] 边 辉,刘艳辉,梁志成,等. 并联2-RRR/UPRR 踝关节康复机器人机构及其运动学[J]. 机器人,2010,32(1):6-12.Bian Hui,Liu Yanhui,Liang Zhicheng,et al. A novel 2-RRR/UPRR robot mechanism for ankle rehabilitation and its kinematics[J].Robot,2010,32(1):6-12(in Chinese).
[8] 秦 涛,张立勋. 考虑跖趾关节运动的踏板式步行康复机器人运动规划[J]. 机器人,2014,36(3):330-336.Qin Tao,Zhang Lixun. Motion planning of a footpadtype walking rehabilitation robot considering motion of metatarsophalangeal joint[J].Robot,2014,36(3):330-336(in Chinese).
[9] 禹润田,方跃法,郭 盛. 绳驱动并联踝关节康复机构设计及运动性能分析[J]. 机器人,2015,37(1):53-62.Yu Runtian,Fang Yuefa,Guo Sheng. Design and kinematic performance analysis of a cable-driven parallel mechanism for ankle rehabilitation[J].Robot,2015,37(1):53-62(in Chinese).
[10] Jamwal P K,Xie S,Aw K C. Kinematic design optimization of a parallel ankle rehabilitation robot using modified genetic algorithm[J].Robotics & Autonomous Systems,2009,57(10):1018-1027.
[11] Abbasnejad G,Yoon J,Lee H. Optimum kinematic design of a planar cable-driven parallel robot with wrench-closure gait trajectory[J].Mechanism and Machine Theory,2016,99:1-18.
[12] 刘海涛,熊 坤,贾昕胤,等. 一种气动肌肉驱动的三自由度踝关节康复装置:105943306A[P]. 2016-09-21.Liu Haitao,Xiong Kun,Jia Xinyin,et al. A 3-DOF Mechanism Actuated by Pneumatic Muscles for Ankle Rehabilitation:105943306A[P]. 2016-09-21(in Chinese).
[13] Xie Shenglong,Mei Jiangping,Liu Haitao,et al. Motion control of pneumatic muscle actuator using fast switching valve[C]//Proceedings of ASIAN MMS2016and CCMMS2016Mechanism and Machine Science.Guangzhou,China,2016:1439-1451.
[14] 王企远. 步行康复训练机器人助行腿的步态规划与运动控制[D]. 上海:上海大学机电工程与自动化学院,2011.Wang Qiyuan. Gait Planning and Motion Control for Gait Traing Robot[D]. Shanghai:School of Mechatronic Engineering and Automation,Shanghai University,2011(in Chinese).
[15] 姜礼杰,王良诣,王 勇,等. 一种混合输入并联拟人步态康复机器人的机构设计与分析[J]. 机器人,2016,38(4):495-503.Jiang Lijie,Wang Liangyi,Wang Yong,et al. Mechanism design and analysis of a hybrid-input parallel rehabilitation robot with humanoid gaits[J].Robot,2016,38(4):495-503(in Chinese).
[16] Pi Y,Wang X,Gu X. Synchronous tracking control of 6-DOF hydraulic parallel manipulator using cascade control method[J].Journal of Central South University of Technology,2011,18:1554-1562.
[17] 施昕昕,常思勤. 一种新型 6自由度运动平台的控制研究[J]. 机械工程学报,2014,50(3):56-63.Shi Xinxin,Chang Siqin. Research on control of a novel 6-DOF motion platform[J].Journal of Mechanical Engineering,2014,50(3):56-63(in Chinese).
[18] 谢胜龙,刘海涛,梅江平,等. 基于高速开关阀的气动人工肌肉轨迹跟踪控制建模与仿真[J]. 农业机械学报,2017,48(1):368-374,385.Xie Shenglong,Liu Haitao,Mei Jiangping,et al.Simulation of tracking control of pneumatic artificial muscle based on fast switching valves[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):368-374,385(in Chinese).
