基于STM32的联合收割机脱粒滚筒监控系统
2018-05-14任玲陈宽政袁书恒王勇
任玲 陈宽政 袁书恒 王勇
摘 要: 以STM32单片机为控制中心,以脱粒滚筒转速、凹板压力、传动链张紧力、谷物流量和谷物水分为监测量,提供一种联合收割机脱粒滚筒的监控装置,可以精准将信息反馈给操作人员,及时控制联合收割机脱粒滚筒堵塞故障的发生。
关键词: 脱粒滚筒; STM32单片机; 监控装置
中图分类号: TP 368.1 文献标志码: A 文章编号: 1671-2153(2018)03-0093-03
0 引 言
联合收割机用于收获小麦、水稻、玉米等谷物,能够一次完成谷类作物的收割、脱粒、分离茎杆、清除杂余等工序,可节省大量的劳动力。然而,目前国内大多数联合收割机是纯机械式的,需要人工根据作业条件控制联合收割机,脱粒滚筒作为联合收割机最易出现堵塞故障的部位,如果能实现自动监控对联合收割机工作效率具有非常重要的意义。本文设计一种基于STM32单片机的联合收割机脱粒滚筒监控系统,采用触摸屏实现实时数据显示,并能够在线修改控制器内部参数。本系统可以精准将信息反馈给操作人员,及时控制联合收割机脱粒滚筒堵塞故障的发生。
1 半喂入轴流式脱粒滚筒模型
联合收割机按喂入方式分全喂入式和半喂入式。全喂入式是指割台切割下来的谷物全部进入脱粒脱粒滚筒;半喂入式是指割台切割下来的作物仅穗头部进入脱粒滚筒,与全喂入式相比,半喂入机型减少了脱粒、清选的功耗,谷物损失少,有着广阔的应用前景。半喂入轴流式脱粒滚筒由滚筒、连接轴、弓尺、凹板和轴承组成。滚筒工作时,谷物以垂直于滚筒轴线方向喂入,并沿滚筒轴运动,谷物在凹板筛上受到强烈碰撞,稻谷落入清选装置,谷穗被夹持链输送到尾部处理机构。以半喂入轴流脱粒滚筒为研究对象,脱粒装置工作过程所需总功率的数学模型为[1]
式中:P为滚筒所需总功率;w为滚筒转速;A为与传动方式、轴承种类、机械磨损程度等有关的系数;B为与滚筒转动时的迎风面积有关的系数;K1,K2,K3为系数;u为谷物与凹板的平均摩擦系数;q为谷物喂入量;D为滚筒的直径;ρ为谷物密度;d为凹板间隙;S为凹板展开面积;V0为谷物喂入时的速度;V3为滚筒旋转线速度。
由式(1)可以看出,在保持滚筒w恒定转速时,影响脱粒滚筒功率P大小的主要因素有喂入量q,滚筒转速w,滚筒直径D,谷物喂入式的速度V0和谷物密度ρ等因素有关。其中脱粒滚筒功率P随着喂入量q和滚筒转速ω的增加而增大,随着谷物密度ρ增加而减小。基于此,构建以滚筒转速、喂入量、传动链张紧力、凹板压力、谷物含水率为参数的脱离滚筒监控系统,实现脱粒效率的最大化,脱粒损失的最小化。
2 监控系统的结构设计
联合收割机脱粒滚筒监控装置以STM32F103单片机为控制核心,再加触摸屏、传感器模块以及相关外围设备组成。传感器模块选用NS304F双头螺杆微型压力传感器用于检测脱粒凹板压力的第一压力传感器和传动链张紧力的第二压力传感器,选用非接触式的霍尔传感器用于检测滚筒转速,采用力-电传感器检测谷物流量,选用变介电常数式的电容水分传感器检测谷物湿度[2],上述传感器组可以实时检测喂入量、谷物含水率、脱粒滚筒转速、脱粒凹板压力和传动链张紧力,将检测到的压力、流量、转速和湿度用信号经过滤波、整形、放大处理后送给STM32F103单片机。触摸屏与单片机之间通过PB和PC并口通信,通过软件设计触摸屏界面,能够实时显示联合收割机工作状态参数,同时可以在线修改控制器内部参数。输出装置包括蜂鸣器、LED及滚筒变速模块,实现声光报警和收割机调速功能,检测组件、控制单元与输出单元三者之間相互配合共同实现对联合收割机脱粒滚筒的监控。监控系统框图如图1所示。
3 监控系统软件设计
联合收割机监控系统软件采用高级语言C语言编写,C语言具有编程简单,编译效率高的特点[3]。软件设计分为主程序设计、触摸屏子程序设计和步进电机模糊PID控制算法子程序设计。
3.1 主程序流程
主程序实现对传感器监测数据的处理,能根据脱粒滚筒当前的状态,自动调用模糊PID控制算法,完成报警信号处理、调速等功能。主程序结构如图2所示。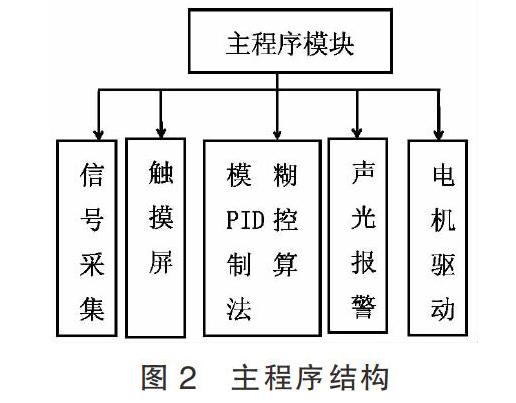
3.2 触摸屏子程序
触摸屏是一款功能强大且操作简单的人机界面[4],触摸屏能够实时显示传感器检测到的数据,并能在线修改参数。触摸屏程序流程如图3所示。
3.3 模糊PID控制算法子程序设计
模糊自调整PID控制的目的就是通过在每个采样时刻不断检测脱粒滚筒转速、传动链张紧力和凹板压力响应误差与变化率的偏差大小[5],根据制定好的模糊规则,PID控制器根据系统响应的变化主动调节自身参数的大小,从而增强系统的动态响应性能[6]。在收割机工作之前根据谷物的性质和田间的状况设置滚筒转速、凹板压力和传动链张紧力,在所测得数值皆处于设定档位范围内,则收割机保持行走速度档位恒定不变。若所测得滚筒转速和凹板压力在设定范围内,但传动链张紧力低于设定值,则提高收割机行走速度档位;若传动链张紧力高于设定值,则降低收割机行走速度档位。模糊处理流程如图4所示。
