一种无人机空气质量监测系统的总体设计
2018-05-14李壮贾贺瑞邓永红
李壮 贾贺瑞 邓永红

摘要:无人机技术经过多年的发展,已应用于社会多个领域,取得了丰硕成果。近几年我国多个城市空气质量下降,用于城市空气质量监测的设备比较缺乏。本文提出一种无人机空气质量监测系统的总体设计,为无人机技术应用于城市空气质量监测的发展提供一定参考。
关键词:无人机;空气质量监测;总体设计
中图分类号:TB472 文献标识码:A
文章编码:1672-7053(2018)02-0130-02
1 背景
无人机按飞行平台进行分类,可以分为固定翼无人机、旋翼无人机、无人飞艇、伞降无人机等。旋翼无人机在日常生活中最为常见,应用极为广泛,技术相应成熟。无人机遥测感应技术作为第三代遥感技术,是无人机对空气质量监测的关键,可以对城市大气数据进行采集、存贮、传输,越来越被国内外的学者专家所关注,是学术领域与企业研发领域的热点课题。无人机的遥测感应是一个综合系统,其中的核心技术包括遥测传感器、数据与存储与实时传输技术。机载空气质量监测传感器是无人机监测空气质量的主要设备,工作类型主要包括样点采集,粒子探测,红外扫描,微波辐射等。无人机的数据存储与实时传输系统是遥感系统的重要组成部分,直接决定了整个用于空气质量监测的无人机规模与品质。无人机平台与地面控制站的信息(包括控制指令、位置信息、任务数据)传输是通过数据链路进行实现。目前,国内对于无人机空气质量监测的研发起步不久,监测的主要指标也只是粒子浓度、NO2含量、O3含量等。
近些年来我国多个城市空气质量下降,空气日益严重污染,尤其入冬更被雾霾这个难题困扰,社会各界对此极为关注。多数城市对于大气环境的监测设备目前依靠空气质量监测站以及便携式的空气质量检测仪。空气质量监测站是空气质量监测和对空气质量进行评估的基础平台,但只能监测本地区域的平均空气质量,且成本和维护费用较高。便携式空气质量仪对于多点城市流动环境监测、不定期抽查具有廉价、方便、快捷的优势,但是便携式质量仪监测范围小,不能满足监测区域的空气质量整体状况的需求,另外地面常规空气质量监测手段难以对垂直方向的污染源监控,旋翼无人机空气监测与数据实时处理可以解决这个问题。
这里提出一种基于四轴旋翼无人机的空气质量监测系统,以弥补现有设备的不足。四轴旋翼无人机稳定性好,能远距离飞行,飞行控制简单可靠,成本低,悬停高度适合空气质量监测。机载空气质量传感器对所监测区域进行采样与数据处理,避免了因监测站点有限或分布不合理,少数人为差错对空气质量监测结果产生的不良影响。
2 无人机空气质量监测系统的概況与总体设计
这套无人机空气监测系统由四轴旋翼无人机平台、地面站两个系统组成,可以针对工业区、大型建筑工程施工场所等区域进行较为精密的空气质量监测。四轴旋翼无人机平台最大飞行半径3km、最大起飞重量5kg、最长飞行时间48min、飞行高度升限2000m(海拔高度),监测空气质量任务高度(50-400)m(相对高度),最大倾斜姿态角度30°,垂直方向飞行速度最高4m/s,水平方向飞行速度最高10m/s,可由地面站规划控制,或者遥控器目视遥控。进行监测任务时:
1)首先将无人机平台放置于开阔地,接通无人机与地面站电源,进行硬件与软件的初始化;
2)随后加载本次任务数据;
3)无人机平台接收到地面站飞行指令,开始升空;
4)达到任务预定高度时,无人机平台开始向任务点平飞;
5)到达任务点后,无人机开始采集此点空气质量数据,并同时下传至地面站;
6)完成本点空气监测任务后,无人机平台飞往下一任务点;
7)循环第5、第6步骤,直到全部任务点监测完成,无人机自主返航;
8)执行任务中若无人机平台发生机械故障或电量过低报警,地面站应及时发送返航指令,否则3分钟之内没有收到地面站返航指令,无人机平台将自主应急返航。
该套无人机空气监测系统任务执行概图如图1。
无人机平台系统概图如图2。
1)机体结构系统:主要由机架(4轴650碳纤维)、芯片主板、云台、脚架等组成,机体总体对称,机体长宽高(38cmx38cmx32 cm),机体结构的整体俯视、侧视图如图2。
2)飞行控制系统:飞控主板(核心控制芯片采用意法半导体公司研制的STM32F103R8T6处理器,通过与地面站规划的任务数据与无人机修正后的姿态数据计算出脉冲宽度调制,输出给电机的驱动模块,从而实现无人机平台的姿态控制)、姿态传感器(实现三轴加速度计、角速度陀螺仪的功能)、电子罗盘(与姿态传感器进行互补滤波运算,实现对偏航角的修正)、GPS模块(实时定位)。
3)动力系统:电动机(采用4008-330KV无刷电机4个)、电子调速器(采用好盈科技公司所研发的50A无刷电调4个)、桨叶(17.5寸折叠碳桨两对)。
4)任务系统:相机(GoPro)、空气质量监测器(主要采用SKA/WRJ-8深圳圣凯安科技公司所研发的空气质量监测仪)。
5)信息存储与传输系统:无线通信模块(与飞控交联,可以实现地面站对无人机监控及关键数据的传输)、数传天线(Anykey无人机图传数传天线,824-960的频率连续可调)。
6)供电系统:锂聚合物电池(20000mah 6s,配有充电器)、电缆,同时提供抵押报警功能。
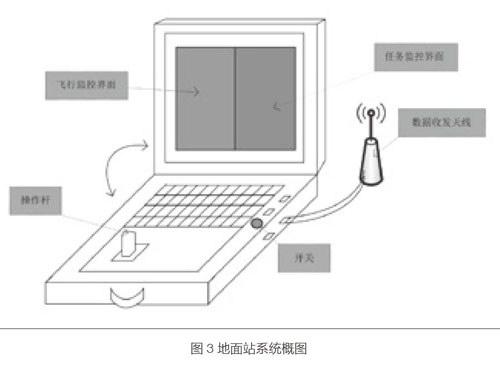
地面站系统概图如图3:
1)地面控制站结构:整站长宽高尺寸(40cmx33 cmx18cm),最大重量不超过6kg,最大负荷持续工作时间6h,由控制面板(3k碳纤维,可支持USB/HDMI/SDI/AV/PPM/RJ45NGA/DB9/DCIN接口)、15寸显示屏(分辨率1280x800,输入接口HDMI/VGA/AV,LED背光灯,最大亮度达1000nit)、数据收发送天线等组成。
2)飞行控制系统:适用于Windows XP 32bits、WindowsVista 32/64 bits、Windows 7 32/64 bits、Windows 8 32/64 bits、Windows10 32/64 bits的飞行监控软件,遥控器(采用Futaba-14SG地面站故障应急、其他简单试验目测遥控使用)。
3)任务系统:高清数字图传(采用以色列的AmimonProsight 5.8g高清国传),空气质量监测软件、肮拍软件。
4)信息存储与传输系统:硬件接口、数据信息处理模块,数传电台(采用MAXStream公司研发的远距离无线数传电台,提供标准的RS232/485接口、USB或以太网接口)。
5)供电模系统:锂电池、电缆,同时提供抵押报警功能;可显示当前地面站、无人机平台电量百分比、电压。电源管理系统可过电流保护、过压保护、低压保护、过容量保护、过功率保护,电池可内部自行保护如:过电流保护、过温保护、过压保护、低压保护;若电池单独供电,地面站可持续工作2小時;充电方式:220V电源适配器直充。
6)模拟飞行系统模块:用于模拟练习,提高无人机操作手熟悉地面站控制飞行过程。
3 结语
经过仿真软件进行试验,这套无人机空气质量监测系统的方案总体可行,但之后还要对以下问题进行更深入的研究:
1)最初飞行控制数学建模时,忽略了一些干扰因素,控制效果不够精准,要从算法上认真分析,让误差影响微乎其微。
2)在硬件方面,尤其是电机、电调、电池选用上,希望能找到更好的产品,提升四轴旋翼无人机平台的品质。
3)在航路规划上,要分析所监控的区域,合理分布任务点,进行无人机平台多组编队、多任务规划,使这套无人机空气质量监测系统资源高效利用。
参考文献
[1]谢涛,刘锐,胡秋红,姚新基于无人机遥感技术的环境监测研究进展[J].环境科技
[2]程学功.四轴飞行器的设计与研究[D].杭州电子科技大学
[3]谢涛,刘锐,胡秋红,姚新基于无人机遥感技术的环境监测研究进展[J].环境科技
[4]赵庆展,张天毅,陈洪小型四旋翼无人机空气质量监测仪设计[J].现代电子技术
[5]严孝鑫,张航,周鑫,张帅,邱紫阳,仇国庆基于四旋冀无人机的环境监测系统[J].自动化与仪器仪表