光电探测组件电源抑制比测试方法
2018-05-10宋舒雯张少博宋凝芳
潘 雄,宋舒雯,张少博,王 磊,宋凝芳
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
光纤陀螺是一种全固态角速度测量传感器,因其具有动态范围大、测量精度高等诸多优点被广泛应用于导航传感和惯性测量领域中[1]。随着光纤陀螺向高精度和轻小型方向发展,电磁干扰问题在轻小型一体化光纤陀螺的研制过程中显得更加突出[4]。在已有光纤陀螺检测电路干扰的研究中,多在假定干扰位置和特性的前提下分析该干扰对光纤陀螺性能的影响,并未对干扰的传播机理进行定量研究[6]。
由于光纤陀螺的本征频率约在10 kHz (对应10 km超高精度)~1 MHz(对应100 m低精度)之间,频率相对较低,故研究从传导干扰入手。而电源线作为传导干扰的重要传播媒介应作为首要的研究对象。在光纤陀螺主板检测电路的干扰问题中,最典型的干扰路径为阶梯波驱动电路到光电探测组件的干扰耦合通道。在利用电源完整性对其电源通道进行分析时,必须得到光电探测组件的电源抑制比(Power Supply Rejection Ratio,PSRR)。
本文基于光纤陀螺电源传导干扰弱信号特性,提出了基于锁相放大器的光电探测组件电源抑制比测试方法,既解决了测量的带宽限制问题又能有效提高信号的检测范围。本文首先阐述了光纤陀螺中光电探测组件电源抑制比的测试需求,然后提出了基于锁相放大器的光电探测组件电源抑制比测量方案,通过搭建实验平台测量了光电探测组件在不同频率下的电源抑制比大小,同时测量了普通运算放大器的交流PSRR曲线,并与产品的数据手册曲线进行对比。最后,本文对实验结果进行了分析,并提出改善测试精度的进一步措施。
1 光电探测组件PSRR测试需求
1.1 光纤陀螺供电网络
光纤陀螺信号检测与控制电路为典型的数模混合电路,其检测信号的传递通道主要分为两条:一条是以模拟电路为主的微弱信号检测通道,主要包括光电探测组件(PIN-FET)、模拟开关、模数转换器(ADC,Analog to Digital Converter)以及信号调理电路;另一条是以数字电路为主的调制/解调及闭环反馈通道,主要包括数字信号处理器,如现场可编程逻辑阵列(FPGA,Field Programmable Gate Array)、数模转换器(DAC,Digital-to-Analog Converter)和调制波驱动电路,该部分多产生脉冲信号,系统的干扰源多出于此[7]。为减小体积、功耗,降低成本,光纤陀螺数字电路和模拟电路使用同一组电源[8]。
在光纤陀螺主板检测电路的各类干扰中,具有典型代表性的是调制信号通过电路耦合到光电探测组件产生的干扰[9],该干扰经过信号调理电路放大后进入到光纤陀螺闭环检测系统中,产生测量误差。从DAC到光电探测组件的电源分配网络的传导干扰传播示意图如图1所示。
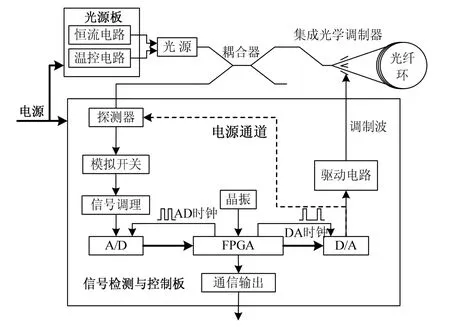
图1 DA到PIN-FET PDN传导干扰示意图Fig.1 PDN conduction interference diagram of DAC to PIN-FET
1.2 PIN-FET电源干扰抑制要求
选取DAC到光电探测组件的电源分配网络为干扰传播途径,此时DAC为干扰源,光电探测组件为敏感源。从电磁兼容三要素来说,若要解决干扰问题,必须了解敏感设备的抗干扰特性,即明确光电探测组件电源输入端对干扰的抑制要求。在光电探测组件输出端引入干扰的光纤陀螺闭环系统相位域模型如图2所示。
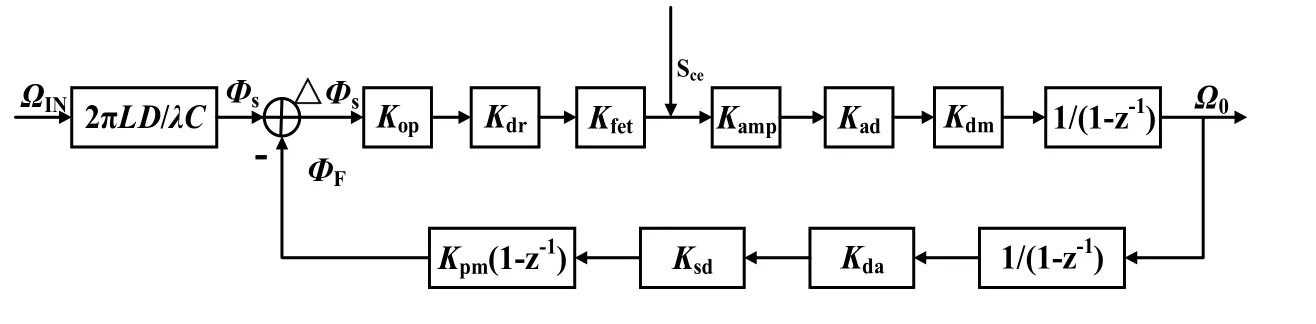
图2 引入干扰的光纤陀螺闭环系统相位域模型Fig.2 Phase domain model of fiber optic gyro closed-loop system with interference
图2中,L为光纤长度,D为光纤环直径,λ为光波长,c为真空光速,Kop为光电转换器的输入光功率,Kdr为光电转换效率,Kfet为跨阻抗放大器增益,Kamp为信号调理电路放大增益,Kad为AD转换器增益,Kdm为数字解调增益,Kda为DA转换器增益,Ksd为调制波驱动电路增益,Kpm为调制器的调制系数,ΩIN为输入角速度,Ω0为输出角速度,Фs为Sagnac相移,ФF为反馈相移,ΔФ为闭环反馈控制的相位差[7]。
以0.3 (°)/h的光纤陀螺为例,其模型参数取值如表1所示。按照表1参数,当输入角速度ΩIN为0.3 (°)/h时有此时光电探测组件输出端产生的交流电压为:
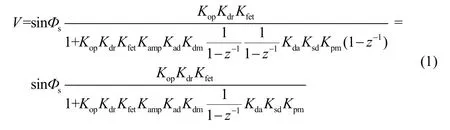

表1 模型参数表Tab.1 Parameters of model
代入模型参数,若产生与该电压同等量级的干扰,则Sce=V=4.51×10–7V,即当光电探测组件输出端有的干扰电压时会对 0.3 (°)/h的光纤陀螺产生精度影响。若要求干扰的抑制比该电压小一个量级,则到达探测器输出端的干扰应该抑制到Vout=4.51×10–8V。
光电探测组件输出端噪声来源复杂,既包含信号通道的串扰耦合、空间辐射,也包括电路噪声等。由于单独提取各类干扰十分困难,假设来自其电源端的干扰占输出总干扰的十分之一,则其输出端要抑制的电源干扰也比要抑制的总干扰电压小一个量级,即Vpowerout=1/10×Vout=4.51×10–9V。
联系光电探测组件信号输出端与电源输入端的桥梁是光电探测组件的电源抑制比,现已知探测器输出端要抑制的电源干扰Vpowerout的大小,只要知道电源抑制比,就可以反推出器件电源输入端要抑制的干扰电压Vpowerin,得到敏感设备的抗干扰特性。这样才能定量研究和分析电源传导干扰特性,达到指导抗干扰设计的目的。其中,根据经验法则,时域内的信号在频域内一般关注的带宽为其5次谐波。
为保证分析的准确性,在对陀螺进行干扰分析时本文关注到解调方波的7次谐波处。以0.3 (°)/h的光纤陀螺为例,其本征频率为 333 kHz,根据相干检测特性,陀螺仅对解调方波的奇次谐波敏感,若关注到7次谐波处,则需要测试的PSRR带宽为2.331 MHz。为留有一定裕度,本文测试方案选取测量带宽为3 MHz。
2 电源抑制比测量方案设计
2.1 电源抑制比定义与传统测量方法
电源抑制比定义为电源输入纹波与同频输出纹波的对数比值[10],计算公式为:

式中,ΔVIN指电源输入端电压的波动值,ΔVOUT指器件信号输出端电压的波动值。
该参数常用于描述运算放大器和低压差线性稳压器(Low Dropout Regulator, LDO),在光电探测组件的数据手册中并未给出。在LDO的PSRR测试中,传统方法有基于电感电容(LC)总和节点法、基于放大器的方法及采用示波器的方法[12]。其中:LC总和节点法利用电容C和电感L将来自交流电压源和直流电压源的电压进行叠加,注入LDO的电源输入端,此方法的缺点是适用频带较窄,只适用于1 kHz~500 kHz的中频带;基于放大器和矢量网络分析仪的测量方法对仪器要求较高,在高频处LDO输出的交流信号较小,矢量网络分析仪不易测量;采用示波器的测量方法只适用于PSRR较低的LDO,因为示波器只能测量到mV级的电压[12]。
2.2 基于锁相放大器的电源抑制比测量方法
通过比较LDO的PSRR测量方法,结合光电探测组件自身的测试需求与光纤陀螺的信号频率特点,只需要得到其关键频率点处的PSRR值。由此提出基于锁相放大器的光电探测组件电源抑制比测量方案,不仅可以满足输出信号中小交流信号的测试需求,还能减小测量干扰和不稳定性。
基于式(2),本文设计的 PSRR测试总体方案如图3所示。整个测试系统分为三部分,分别为噪声注入电路、被测件(PIN-FET)和相关检测电路(锁相放大器)。测试思路为:在光电探测组件的直流供电端叠加来自信号发生器通道1的交流小信号以模拟电源纹波注入,信号发生器的通道2输入到锁相放大器的参考信号端,两通道设置为同频同相模式。将光电探测组件信号输出端输入到锁相放大器的信号端,根据相关检测原理在锁相放大器内部解调出与参考端同频的信号幅值大小,即得到电源干扰传递到信号输出端的衰减幅值。通过公式(2)的计算即可得到光电探测组件在该频率下的电源抑制比。改变电源端叠加的交流小信号的频率,可以得到不同频率下的PSRR值,将这些散点进行连线,可以得到PSRR的频率特性。其中,交流信号由信号发生器提供,纹波注入电路采用加法电路,相关检测电路在锁相放大器内部进行。
纹波注入电路中所使用的功率运算放大器为OPA2613,采用±6 V双电源供电,其带宽增益积为230 MHz,输出电流可高达350 mA,满足PSRR测试需求。相关检测电路中所用锁相放大器型号为SR865,其测量范围为10 Hz~4 MHz,符合测量频率范围要求;信号输入范围为10 mV~1V,输出灵敏度为1 nV~1V,符合测量幅值范围要求。
纹波注入电路使用两级功率运算放大器组成同相加法器,完成向光电探测组件的直流电源电压注入交流纹波的功能。其中:第一级运算放大器电路的作用是降低来自信号发生器的交流信号的输出阻抗,提高电路的带负载能力;第二级运算放大器电路的作用是实现交流信号和直流电压信号的叠加。
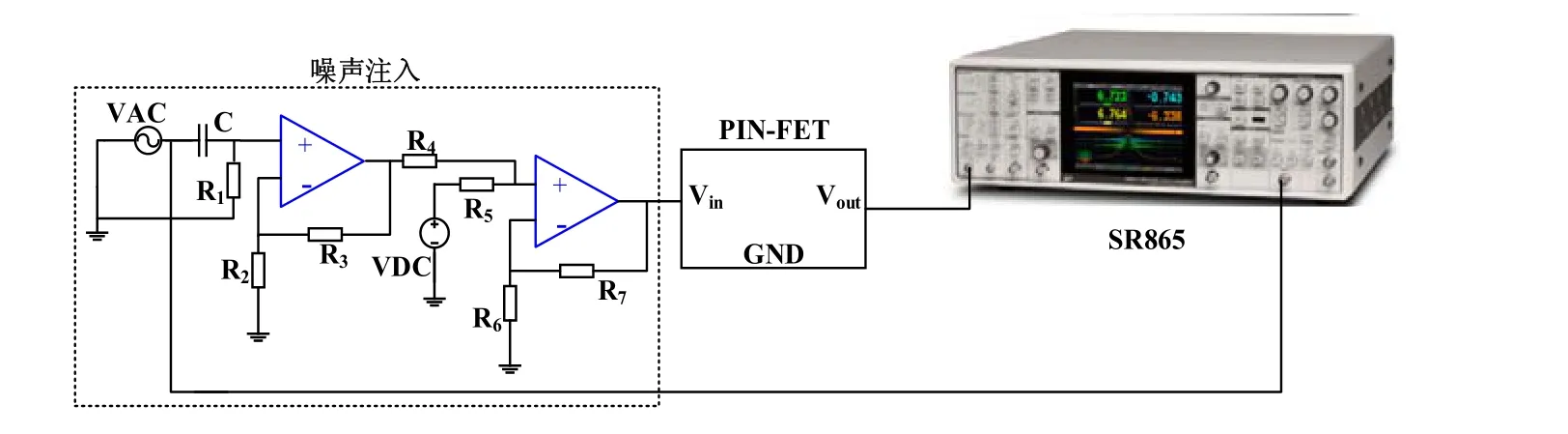
图3 PSRR测试总体方案图Fig.3 Overall scheme design of PSRR measurement
3 测试结果及分析
3.1 普通运算放大器电源抑制比测量
为了保证实验装置的测量精度,首先用相同的测试装置和测试方法测量了常用的OP07D运算放大器的+5V电源管脚的+PSRR频率特性曲线,由于OP07D带宽有限,选取频率范围为10 Hz~1MHz,得到的曲线如图4所示。
由图4曲线可以看出:本文所设计的测试系统实测OP07D运算放大器+5V PSRR曲线与数据手册中的理论+PSRR曲线相关系数r=0.9828,说明两条曲线相关性较好。最大绝对误差发生在80kHz左右,δmax=9dB。手册中所给曲线为典型曲线,单个运算放大器之间会存在一定差异性,因此δmax在可接受范围内。因此,用该装置测量光电探测组件的电源抑制比,其交流特性结果是相对可靠的。由于RC截止频率、运算放大器本身交流特性以及外界环境的影响,测量存在一定的误差,不可能完全与器件数据手册给定的典型值相同。
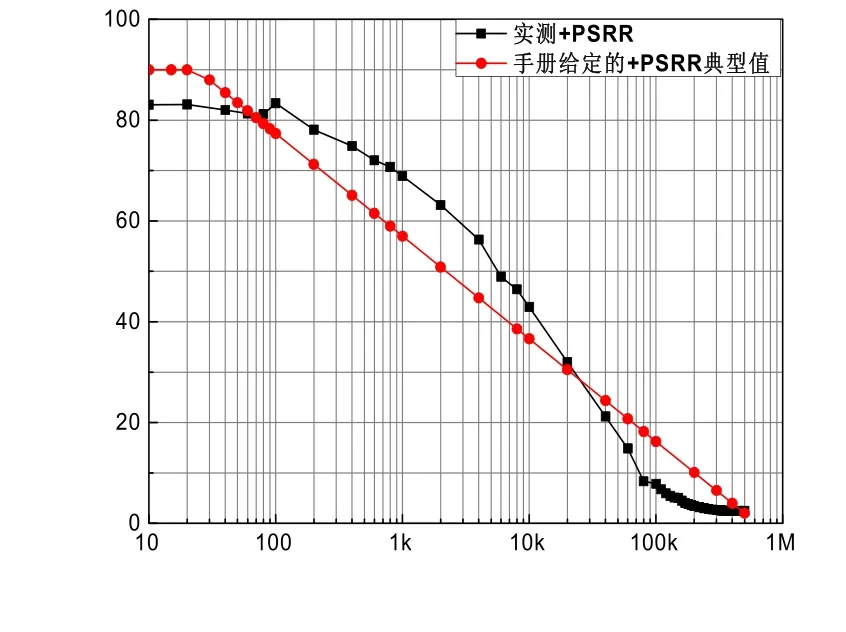
图4 OP07D实测与理论+PSRR曲线对比图Fig.4 Comparison of measured and theoretical +PSRR curves of OP07D
3.2 光电探测组件电源抑制比测量
根据上述原理搭建了基于锁相放大器的光电探测组件电源抑制比测试系统。实验中所用光电探测组件为某0.3 (°)/h光纤陀螺用光电探测组件。
以测量PIN-FET组件+5V电源管脚电源抑制比为例,按图3示意图进行接线,将+5 V电源管脚注入纹波,-5V电源管脚正常供电,组件尾纤不接入光路,以排除光路噪声。设置加入的电源纹波是幅值为100 mV的正弦信号,变换频率从100 kHz到3 MHz,记录各频率点光电探测组件输出端输入到锁相放大器的解调值,得到光电探测组件+5V电源管脚的+PSRR频率特性曲线,如图5所示。

图5 纹波为±100 mV的光电探测组件+5V +PSRR曲线Fig.5 +5V PSRR curve of PIN-FET with ±100 mV ripples
改变注入的正弦信号的幅值,重复实验操作,测量得到纹波幅值为 50 mV、200 mV、300 mV下的+PSRR曲线,将四条曲线置于同一坐标轴下,如图6所示。
从图6曲线可以看出,在光电探测组件+5V直流供电端叠加的不同幅值的纹波,其+PSRR频率特性曲线重合度较高,说明光电探测器的+PSRR在mV级别的纹波干扰下只与器件内部结构有关,与纹波大小无关。由于光纤陀螺的特殊性,只关注调制阶梯波的奇数倍频点,以0.3 (°)/h的低精度光纤陀螺为例,其调制基频为333 kHz,因此由电路RC高通滤波器造成的低频误差可以忽略。
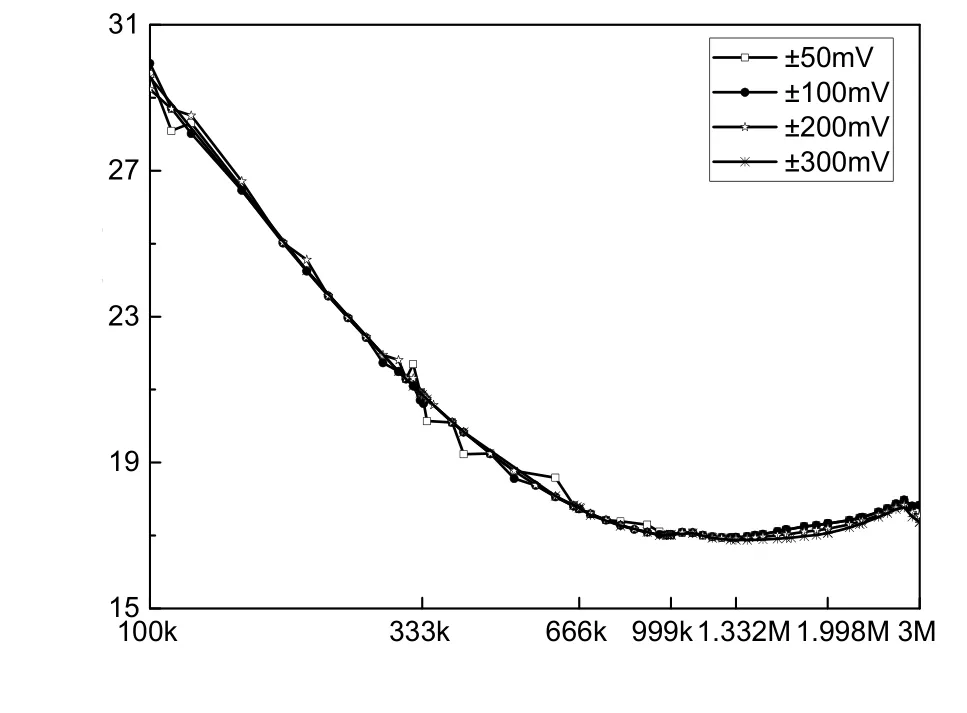
图6 不同纹波幅值下光电探测组件的+5V PSRR曲线Fig.6 +5V PSRR curves of PIN-FET with different ripple voltages
从光电探测组件+PSRR频率特性曲线的走向可以看出,光电探测组件的电源抑制比随频率的升高而降低,在100 kHz频率点处约为29.5 dB,且在该点处+PSRR开始明显衰减,到达333 kHz处+PSRR衰减为20.9 dB,到达3 MHz处衰减为17.9 dB。由此可见,光电探测组件对电源纹波的抑制能力随频率的升高而降低,因此要针对高频噪声进行专门的去耦设计。
光电探测组件电源抑制比频率特性随厂家的不同会有所差异,可以根据不同测试需求选取合适的测量方案。针对测量误差,测试系统还可以进行优化和改进,可以采用屏蔽装置屏蔽周围环境的影响或优化加法电路设计,尽可能减小电路结构带来的误差。
4 结 论
光电探测组件是光纤陀螺中不可或缺的一部分,PSRR是光电探测组件的重要参数之一,其反映了光电探测组件对电源纹波的抑制能力,在光纤陀螺调制串扰的研究中具有十分重要的地位。不同于普通的PSRR测量方法,本文针对光纤陀螺检测电路的信号特点,设计并搭建了基于锁相放大器的电源抑制比测试系统,测量了光电探测组件的PSRR交流特性曲线,并选用常用的运算放大器OP07D进行测试验证。
实验结果表明,文中的测量方法可以有效对光电探测组件进行测量,其电源抑制比曲线呈明显的高通特性,在100 kHz处+PSRR约为29.5 dB,3 MHz处衰减为17.8 dB。因此,在进行光纤陀螺检测电路设计时,要将检测电路电源分配网络的设计与器件特性相结合,才能有效地提高陀螺的抗干扰能力。
参考文献(References):
[1]Yang D S. Digital closed-loop fiber optic gyroscope design based on the FPGA[C]//IEEE International Conference on Solid-State and Integrated Circuit Technology. Hangzhou,2016: 1164-1166.
[2]Pan X, Liu P C, Zhang S B, et al. Novel compensation scheme for the modulation gain to suppress the quantization-induced bias in a fiber optic gyroscope[J]. Sensors 2017, 17(4): 823(1-9).
[3]Xu X B, Song N F, Zhang Z C, et al. Backward secondary-wave coherence errors in photonic bandgap fiber optic gyroscopes[J]. Sensors, 2016, 16: 851(1-7).
[4]李博, 李健壮, 黄晓宗. 小尺寸数字闭环光纤陀螺信号处理电路[J]. 中国惯性技术报, 2017, 25(3): 356-359.Li B, Li J Z, Huang X Z. Signal processing circuit of small-sized digital closed-loop FOG[J]. Journal of Chinese Inertial Technology, 2017, 25(3): 356-359.
[5]马学文, 刘洁瑜, 张志警. 光纤陀螺电磁干扰试验分析[J]. 压电与声光, 2012, 34(2): 218-221.Ma X W, Liu J Y, Zhang Z J. Experimental study on electronmagnetic interference over fiber optic gyros[J].Piezoelectrics & Acoustooptics, 2012, 34(2): 218-221.
[6]Narasimhappa M, Sabat S L, Peesapati R, et al. An innovation based random weighting estimation mechanism for denoising fiber optic gyro drift signal[J]. Optik-International Journal for Light and Electron Optics, 2014, 125(3):1192-1198.
[7]Jin J, Tian H T, Pan X, et al. Electrical crosstalk coupling measurement and analysis for digital closed loop fibreopticgyro[J]. Chinese Physics B, 2010, 19(3): 243-248.
[8]张敬佩, 张春熹, 宋凝芳. 开关电源噪声对光纤陀螺精度影响的研究[J]. 中国惯性技术学报, 2003, 11(1):45-48.Zhang J P, Zhang C X, Song N F. Influence of the noise of switch mode power supply on the precision of FOG[J].Journal of Chinese Inertial Technology, 2003, 11(1): 45-48.
[9]Chong K H, Choi W S, Chong K T. Analysis of dead zone sources in a closed-loop fiber optic gyroscope[J]. Applied Optics, 2016, 55(1): 165-170.
[10]Wang L, Mao W, Wu C D, et al. A fast transient LDO based on dual loop FVF with high PSRR[C]//IEEE Asia Pacific Conference on Circuits and Systems. 2016: 99-102.
[11]Kuo P Y, Chang C H. An output-capacitorless lowdropout regulator with -132dB PSRR at 1kHz[C]//IEEE International Conference on Consumer Electronics. Taipei,2017: 173-174.
[12]尚斌, 罗军, 蔡志刚, 等. 低压差线性电压调整器电源纹波抑制比测试方法[J]. 中国测试, 2017, 43(5): 15-19.Shang B, Luo J, Cai Z G, et al. Power supply rejection ratio testing of low dropout linear regulator[J]. China Measurement & Test, 2017, 43(5): 15-19.
