一种基于外辐射源的弱目标检测跟踪算法*
2018-05-09段金英
段金英,李 盛,陈 恒
(西京学院理学院,西安 710123)
0 引言
外辐射源雷达[1]是本身不发射电磁波,利用广播基站[2]、电视台[3]等作为辐射源的被动雷达系统,具有反隐身、体积小、抗低空突防以及生存周期长等优点,成为国内外科研机构的重点研究方向[1-5]。目前,诸多专家学者针对外辐射源雷达系统,被动相干技术,杂波抑制技术,目标检测与跟踪等问题开展了相应的技术研究,并取得了阶段性成果。由于实际战场环境中的目标信号被强杂波所淹没,如何利用外辐射源雷达实现弱目标的检测与跟踪成为亟待解决的关键问题之一。
文献[6]研究了外辐射源雷达系统下基于单个观测器的目标位置估计问题,并联合方位角和到达时间差,采用总体约束最小二乘算法实现目标位置估计。文献[7]研究了主动雷达系统下弱目标的检测跟踪问题。文献[8]针对外辐射源雷达系统下的目标跟踪问题,提出了一种基于极大似然的时差-频差联合定位算法,并利用牛顿迭代法进行优化求解,实现目标状态估计。为了有效解决强杂波条件下弱目标的检测与跟踪问题,本文提出了一种基于遗传算法[9]极大似然概率数据关联[10-11](Genetic Al gorithm Maximum Likelihood Probabilistic Data Association,GA-ML-PDA)的弱目标检测跟踪算法。该算法基于多基站外辐射源雷达系统的检测跟踪数学模型,通过对多帧测量进行积累,构建对数似然函数(Log Likelihood Radio,LLR)。再利用遗传算法优化求解LLR,实现航迹初始化。最后采用滑窗[12]批处理技术进行航迹维持。
1 系统建模
多基站外辐射源雷达系统目标定位原理如图1所示,其中Tx表示外辐射源,Rxj表示第j个接收站,Ox表示目标表示Ox与Rxj间的距离,dOT表示Ox与Tx间的距离,表示Tx与Rxj间的距离,θj表示接收站Rxj的目标视角。Rxj由监控天线和参考天线组成,监控天线接收由Tx发射且经目标反射的电磁波信号,参考天线接收Tx发射的直达波信号,通过比较目标回波信号和直达波信号实现目标定位。
其中,F为目标的状态转移矩阵,T为传感器采样周期。
为通过GA-ML-PDA批处理算法实现弱目标的检测与跟踪,通常做如下基本假设:
假设1:已知目标的检测概率为Pd,并且不同帧之间的测量相互独立;
假设2:每帧的测量集中最多包含一个源于目标的测量,其余测量为杂波;
假设3:已知目标状态的变化方式;
假设4:杂波在测量空间Ωj内服从均匀分布,杂波的个数服从参数为λ的泊松分布;
假设5:目标测量噪声服从高斯零均值分布。
基于如上假设,多基站外辐射源雷达系统中弱目标的测量模型为:
2 GA-ML-PDA算法
基于多基站外辐射源的GA-ML-PDA检测与跟踪算法基本思想为:首先通过对Rxj获取的测量信息多帧积累构建对数似然比,并利用GA优化算法求解LLR的最优估计,然后通过多传感器数据融合实现目标航迹初始化,最后采用滑窗批处理技术实现目标航迹维持。
2.1 构建LLR
根据外辐射源雷达系统的测量模型和全概率理论,当测量源自目标时则有:
则式(5)和式(6)的比值为:
2.2 基于GA算法的LLR优化求解
在ML-PDA算法框架下,目标状态估计问题可以转换为以下优化求解问题:
由此可见,能否获得精度足够高的全局优化解,直接影响ML-PDA的算法性能。为了提高ML-PDA的优化性能,改善目标检测跟踪结果,本文提出基于GA的优化求解方法。遗传算法是一种不需要先验信息的基于自然选择和基因遗传原理的随机并行搜索全局最优解的高效优化方法,其具体步骤为:
Step1:编码和初始化群体:首先按照所研究问题的不同性质,选择与之对应的编码方式,然后按照一定规则生成具有H个染色体的初始群体:。
Step2:计算适应度:分别计算popt中每条染色体 popt,r的适应度:
Step3:判断:确定算法遗传代数是否达到最大值,如果达到最大遗传代数则输出优化值Xˆj1作为目标的状态估计,否则执行Step4操作。
Step4:选择:首先按照每条染色体不同的适应度,由式(12)分别计算其所对应的选择概率:
然后按照此概率分布从popt,r中随机选取若干个染色体遗传到下一代群体,建立新的群体:
Step5:交叉:按照Pc的概率进行染色体交配,建立具有H个染色体的新种群crosspopt+1。
Step6:变异:染色体按照概率Pm进行基因变异,构建新种群mutpopt+1,完成一次遗传操作过程,且将其作为下一代遗传操作的父代,然后返回Step2:popt=mutpopt+1。
2.3 多传感器数据融合
首先各传感器利用获取的测量信息分别估计目标状态,然后对所得结果进行融合,最后得到目标状态的最终估计。采用的融合准则为:根据传感器的测量误差计算出估计位置误差Rmsej,各传感器的信任权重系数为:
则融合后目标状态估计为:
2.4 基于滑窗法的航迹维持
假设滑窗的宽度为W,滑窗移动步长为S,滑窗批处理技术实现航迹维持的思想是使用接收站获取的最近W帧量测信息来估计目标的状态,当得到新S帧的量测信息后,采用滑窗方式移除W帧量测中的前S帧,将最新获得的量测作为滑窗中W帧的后S帧。然后根据新滑窗的W帧量测信息来估计目标的状态,依次循环实现航迹维持。若获取的测量集为,则目标第k帧的运动状态为:
3 仿真分析
本节通过两个典型场景说明所提算法的有效性。场景1:目标不存在;场景2:目标中途进入并离开探测区域。场景参数如下:探测时间60 s,测量周期为 1 s,Ox初始状态为[5 km,0.2 km/s,3 km,0.3 km/s]T,Rx1的位置为[0 km,0 km],Rx2的位置为[-3 km,1 km],Rx3的位置为[4 km,2 km],Tx的位置为 [0 km,10 km],0.02 rad,0.05 km,[0.17 rad,1.40 rad][0.01 km,30 km]。算法参数如下:W=20,S=1,Pd=0.9,λ=5。GA-ML-PDA 算法调用Matlab GA函数,参数为:种群大小20,创建初始种群函数为Constraint dependent,初始种群向量为[0;1],交叉概率为 0.8,遗传代数 100,变异率为0.2,算法停止下界1e-6。计算机参数如下:Intel i5 CPU M480,内存2 GB,32位操作系统,仿真软件为MATLAB2013a。
3.1 目标不出现
图2给出了目标不出现情况下,速度和位置分别取真值时,位置解与速度解的分布。可以看出存在多个位置解和速度解,经门限检测后,判定目标不存在。
3.2 目标出现
假定目标第21 s出现,第41 s消失,出现20 s。图3(a)和(b)分别给出了角度和距离差的原始测量。图4(a)和(b)分别给出了LLR当速度和位置取真值时,位置解和速度解的分布。可以看出,目标存在时,经门限检测后,目标的位置解和速度解是唯一的。
图5给出了GA-ML-PDA算法跟踪效果图,由图5可知该算法能有效检测跟踪目标。表1给出了滑窗宽度对GA-ML-PDA算法跟踪精度的影响,从表1可知,随着滑窗宽度的增大,跟踪精度也逐渐提高。
进一步,仿真对所提算法与基于网格搜索的GS-ML-PDA算法和基于拟牛顿法的QN-ML-PDA算法进行了比较。下页图6(a)和(b)分别给出了3种算法的距离估计RMSE和速度估计RMSE。表2比较了3种算法在不同参数时的运行时间。可见所提算法比较QN-ML-PDA算法牺牲少量实时性提高了估计精度,比较GS-ML-PDA算法提高了估计精度和实时性,改善了多基站外辐射源雷达对弱目标的检测与跟踪性能。
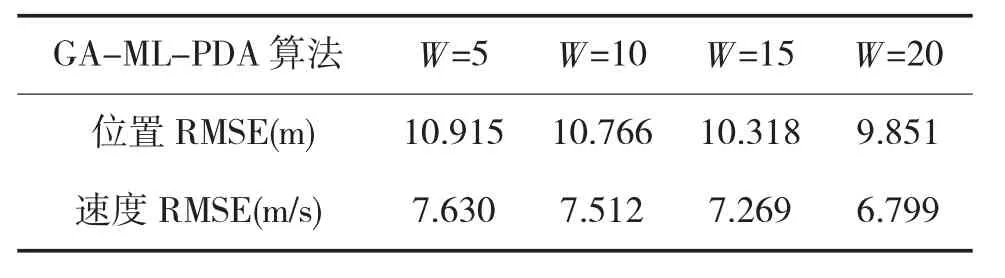
表1 不同滑窗宽度时GA-ML-PDA算法的跟踪精度
4 结论
本文针对强杂波条件下弱目标的检测跟踪问题,提出一种基于多基站外辐射源的GA-ML-PDA弱目标检测跟踪算法。与同类算法仿真对比可知,本文所提算法能有效减小目标跟踪误差,提高检测性能。下一步的工作将重点研究强杂波条件下多目标的检测跟踪问题。
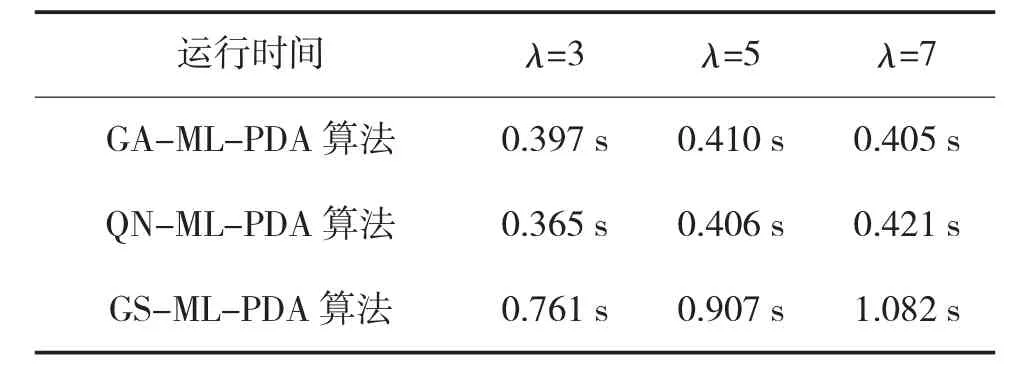
表2 Pd=0.9 3种算法在不同值时所耗费的时间
参考文献:
[1]COLONE F,LOMBARDO P.Polarimetric passive coherent location[J].IEEE Transactions on Aerospace and Electronic Systems,2015,51(2):1079-1097.
[2]LI H,WANG J.Particle filter for manoeuvring target tracking via passive radar measurements with glint noise [J].IET Radar Sonar Navig.,2012,6(3):180-189.
[3]MOJTABA R,SEYYED M K,MOHAMMAD M.Data fusion in MIMO DVB-T-based passive coherent location[J].IEEE Transactions on Aerospace and Electronic Systems,2013,49(3):1725-1737.
[4]王小谟,吴曼青,王政.未来战争中的“沉默哨兵”—外辐射源目标探测与跟踪雷达[J].现代军事,2000,15(10):10-12.
[5]唐续.外辐射源雷达目标跟踪技术研究[D].成都:电子科技大学,2011.
[6]JING L,ZHAO Y,LI D.Accurate single-observer passive coherent location estimation based on TDOA and DOA[J].中国航空学报(英文版),2014,27(4):913-923.
[7]陈延军,梁新华,潘泉.两级量测更新的粒子滤波检测前跟踪算法[J].传感技术学报,2015,28(1):115-120.
[8]赵勇胜,赵闯,赵拥军.利用外辐射源的TDOA和FDOA目标定位算法[J].计算机工程与应用,2017,54(8):1-7.
[9]RODRIGUCZ F,GARCIA-MARTINEZ C,LOZANO M.Hybrid meta-heuristics based on evolutionary algorithm and simulated annealing:Taxonomy,comparison,and synergy test[J].IEEE Transactions on Evolutionary Computation,2012,16(6):787-800.
[10]KIRUBARAJAN T,BAR-SHALOM Y.Low observable target motion analysis using amplitude information[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1367-1384.
[11]BLANDING W R,WILLETT P,BAR-SHALOM Y.Directed subspace search ML-PDA with application to active sonar tracking [J].IEEE Transactions on Aerospace and Electronic Systems,2008,44(1):201-216.
[12]BLANDING W R,WILLETT P,BAR-SHALOM Y.Offline and real-time methods for ML-PDA track validation[J].IEEE Transactions on Signal Processing,2007,55(5):1994-2006.
