EDPF-CP系统在风电机组全信息采集中的应用
2018-05-04刘维维张俊雄姚慧卿刘明佳何煦
文 | 刘维维,张俊雄,姚慧卿,刘明佳,何煦
在风力发电技术中,风能被风力发电机组叶片吸收后转换为动能,故桨叶控制对风力发电机组的发电效率起着决定性的作用,同时变流器对于稳定电网负荷至关重要。目前,变桨系统及变流器主要是通过CANopen等协议与主控系统进行通信,实现数据采集与风力发电机组控制,且通信数据长度基本固定。但是随着风电技术的进一步发展,智能化大数据技术在风电系统中的应用是大势所趋。本文在此背景下,在满足传统风力发电机组信息采集且不影响主控程序运行负荷的基础上,以EDPF-CP双引擎控制系统为平台,主控程序依旧运行在PLC内核中,在DPU内核中应用Modbus TCP及UDP通信协议对变桨系统及变流器的共约两千个点的全信息数据进行采集,全量数据可在上位机显示并存储,这将为风力发电机组预维护及智能故障诊断提供一定的可行性策略,并为风电机组的大数据信息融合技术的实现找到了有效方法。
EDPF-CP系统
EDPF-CP系统是基于最新计算机嵌入系统技术和现场总线技术开发的分布式控制系统,是在EDPF-NT+系统的基础上,经全面优化升级而成的新一代控制系统。系统主控制器基于DCS技术研发,植入PLC组态运行环境,形成独创的DCS/PLC双控制引擎,工程应用中可按需配置。该控制技术充分结合了DCS和PLC各自优势,作为DCS控制器可兼容EDPFNT+系统,作为 PLC控制器则完全兼容IEC61131-3标准,用户通过配置不同的上位机软件即可实现PLC或DCS的完整控制系统。这既可面向对象技术,实现模块化封装及图形化显示,又能提供二次开发环境和高级应用开发环境,为风电机组智能化研究提供了平台。
系统控制器采用嵌入式无风扇设计的低功耗高性能计算机,内置实时多任务软件操作系统和嵌入式组态控制软件,将网络通信、数据处理、连续控制、离散控制、顺序控制和批量处理等有机地结合起来,形成稳定、可靠的控制系统。EDPF-CP系统可实现数据的快速扫描,用于实现各种实时任务,包括任务调度、IO管理、算法运算,同时拥有开放的结构,可以方便地与其他控制软件实现连接和数据交换。
系统中的电源、控制器、IO模块、通信网络均可冗余配置,提高系统的可靠性。系统电源和检测电源隔离,模块通道间电气隔离,全隔离高抗干扰设计确保了运行的可靠性。同时采用模块化设计,维护方便,硬件和软件都具有多重抗干扰和容错纠错能力。采用表面贴装技术的 FLASH保存组态数据,无需电池,确保数据的安全可靠长期保存。抗电磁干扰符合 IEC61000标准,具有 EMC IIIA 级电磁抗干扰能力,可满足多种工程需要。
通信方式
EDPF-CP系统平台支持多种通信方式,且控制器采用双引擎内核结构,即DCS内核与PLC内核。通信总线包括控制总线和信息总线,变桨系统及变流器的控制总线使用标准CANopen协议的工业通信总线;信息总线使用标准工业以太网协议的通信总线,消除变流器和变桨系统的信息孤岛,所有数据在经由主控制器后上传至SCADA。具体的通信方式如图1所示。
从图1中可以看出,主控制器通过CANopen协议与变桨系统和变流器进行数据通信,实现实时数据监控。为了实现对变桨系统及变流器的全部数据量的采集,在不改变及影响高速率CANopen通信控制总线的基础上,采用另外两种不同的通信方式与变桨系统和变流器进行通信,采集全量数据,其中,变桨系统采用Modbus TCP通信协议,变流器采用UDP通信协议,将数据全部采集后上传至SCADA。
EDPF-CP系统通过EIO通信模块实现与第三方系统通信,系统支持多种协议,如Modbus TCP/IP、Modbus RTU、UDP、104等。每种协议有其对应的虚拟卡件,通过组态实现对第三方系统通信数据的采集。确定好EDPFCP系统与变桨系统及变流器的通信协议和工作模式,根据通信测点表,对虚拟卡件进行组态,结合卡件组态信息配置通信任务,存储在EIO通信配置文件中。配置内容包括通信设备个数、设备ID、通信协议、设备IP地址及端口号、通信任务周期及超时时间、缓冲区、功能码、起始地址等,配置完成后进行数据通信。
优势对比
与传统风电机组相比,EDPF-CP系统存在如下优势:
(1)传统风电机组控制系统仅含有PLC运行程序,EDPF-CP系统采用了双引擎结构,内置PLC及DCS两个内核,且DCS内核的运行不会对主控程序在PLC中的运行造成影响。
(2)传统风电机组在PLC内部仅含有变桨系统及变流器系统的控制点表,约三百个。而EDPF-CP系统中仅信息点表就近两千个,从点表的数量上要多于传统风电机组。
(3)变桨系统与变流器系统的信息点直接与EDPF-CP系统的DPU进行通信,未占用主控PLC负荷,不对PLC主控程序造成影响。
(4)信息总线使用标准工业以太网协议,以秒级频率进行全量数据采集,消除变流器和变桨的信息孤岛,为风电机组的预维护及大数据处理提供数据依据。

图1 变桨系统及变流器的控制总线及信息总线数据传输示意图
变桨系统信息采集
传统变桨通信是在主控程序PLC中通过CANopen、CAN等协议进行通信,EDPF-CP系统具有双引擎结构,在PLC主控程序中依旧支持传统通信,在DPU中采用Modbus TCP协议与变桨信息网的一千多个点进行全信息通信。
一、全量数据采集通信方式——Modbus TCP
变桨系统全数据量的采集,不仅包括桨叶位置、温度信息等主要数据,还采集了相关的报警数据、调试界面数据等,如PLC闭锁、电机风扇状态、加热器状态、桨叶位置高、允许手动控制等,为变桨系统的智能诊断控制提供了数据来源。
主控制器设定为主站,变桨系统作为从站,两者通过Modbus TCP协议进行通信,按照通信测点表将所有的变桨系统实时数据进行采集,通信速率以秒级为单位,采集数据传输至SCADA上位机画面显示,供运维人员实时监控,同时所有数据进入历史库中进行存储,方便后期的数据导出及分析。
对变桨系统全量数据的采集,用到了MDI、MAI虚拟卡件,MDI卡件用于读取开关量,可以使用读线圈和读离散量方式,也可以使用读保持寄存器和读输入寄存器方式。需要设置的参数包括控制区、模块地址、卡件位置、设备ID、从站ID、起始寄存器号、起始点号、结束点号、功能码,配置信息如图2所示。
MAI卡件用于读取模拟量,使用读保持寄存器和读输入寄存器方式。需要设置的参数包括控制区、模块地址、卡件位置、设备ID、从站ID、起始寄存器号、起始点号、结束点号、功能码、数据类型、字节顺序类型,配置信息如图3所示。
二、数据采集实现形式
按照变桨系统通信测点表配置相关文件,包括虚拟通信卡件、卡件参数设置和通信任务配置,用网线连接主控制器和变桨系统进行调试,通信正常情况下,在SCADA上位机画面中可显示变桨系统实时数据,如图4所示。
变流器信息采集
在EDPF-CP双引擎结构中,PLC主控程序与变流器进行通信,在DPU中应用UDP通信协议与变流器信息网的近两千个点进行全信息通信,不影响PLC主控程序的运行负荷。

图2 MDI配置信息
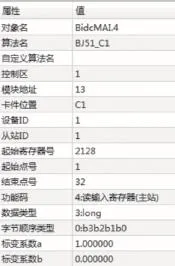
图3 MAI配置信息

图4 变桨系统数据通信至SCADA
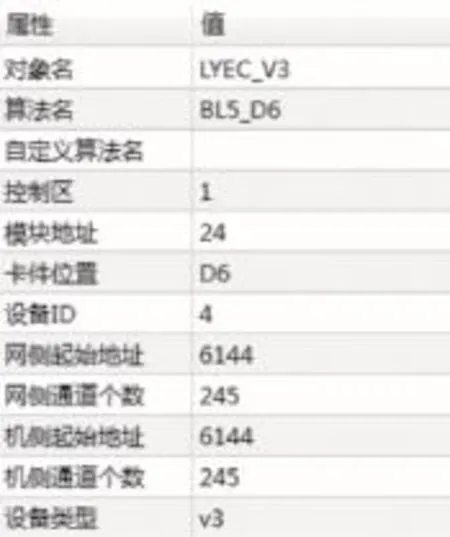
图5 LYEC_V3配置信息
一、全量数据采集通信方式——UDP
控制器作为主站,变流器系统作为从站,EDPF-CP系统支持多种通信方式。在此以UDP通信协议为例,将所有的变流器通信实时数据进行采集后在上位机画面显示,通信速度为秒级,同时所有数据进入历史库中进行存储。
对变流器全量数据的采集,使用LYEC_V3虚拟卡件。
LYEC_V3虚拟卡件需要设置的参数除控制区、模块地址、卡件位置、设备ID以外,还要根据变流器数据特性设置网侧和机侧起始地址和通道个数,卡件配置信息如图5所示。
二、数据采集实现形式
按照变流器需上传的点表配置相关文件后,通信正常情况下,变流器数据上传至SCADA,数据的显示方式与图4相同。
结语
由于传统风电场中风电机组私有通信协议往往无法开放,风电机组监控系统形成信息孤岛,无法实现全面互动,运营期软件升级和检修维护十分困难。本文提出的全量数据采集技术,在网络互联的风电机组信息融合技术研究基础上,形成风电机组监控的无缝通信体系,实现真正意义上的信息共享。
(1)采用工业以太网技术进行数据互联,实现风电机组及其子系统的全信息采集与网络化共享,同时配置高速数据存储器记录所有的运行数据。这将为风力发电机组主控系统、变流系统、变桨系统、叶片智能监控系统及关键部件状态监控系统提供一定的思路。
(2)基于全信息数据,使SCADA系统不仅仅具有监视及控制作用,同时附加周期性及累积的智能大数据分析与统计评估后处理功能,实现机组全信息互联监控。
(3)增强风电机组的信息融合与状态统计,在实现原有功能基础上,加强故障诊断与预测功能,为风电场的数字化、信息化和智能化搭建更加先进的软件系统框架,并为模块化灵活扩展以及可定制化系统的实现打下坚实的基础。