无人机航路规划评估
2018-05-04刘聪锋西安电子科技大学陕西西安7007解放军63893部队河南洛阳47003
葛 声,刘聪锋,蔡 啸(.西安电子科技大学,陕西 西安 7007;.解放军63893部队,河南 洛阳 47003)
0 引 言
无人机(UAV)是无人驾驶飞行器的简称。它以低成本、不易被捕获、损伤较小、可长时间巡航飞行等优点,在现代战场的高危险任务中扮演着极其重要的角色[1-2]。无人机执行攻击任务时,把敌方防御区域内的某一点作为起始点,把所要摧毁的目标所在位置作为目标点。通过航路规划,寻找无人机从起点到目标点过程中既满足机动性能又能实现任务目标的最优或次优航路[3]。
一般来说,对于自动寻优,得到的最优航路是根据代价函数确定的最优航路。但是根据不同指标得到的最优航路会有很多,仍需要从得到的备选航路中进行选择,尤其是在作战环境不完全确定情况下执行任务,需要在执行任务前规划出多条航路,供无人机在执行任务时根据具体情况进行选择。在对抗的战争环境中,航路评估的实时性很有可能是决定战局的关键因素。在航路评价中,需要考虑航路性能的各种因素,对各项指标进行量化和计算,确定影响航路综合性能的指标权重,完成综合指标的计算。航路评价一般关注的主要因素包括航路稳定性、航路安全性、航路任务约束、航路任务完成。
因此无人机航路规划是一个多准则问题,针对无人机航路评估指标众多的问题,本文采取模糊综合评价[4-7]法对无人机的航路进行评估。
1 航路评估指标体系建立
1.1 航路的稳定性
(1) 最小平飞距离
无人机在调整飞行姿态前,必须直飞的距离用L表示,则任意一段航迹的长度,都不小于L:
li≥L,i=1,2,…,n
(1)
(2) 最大转弯角
无人机转弯时能转过的最大角度即最大转弯角,如图1所示。
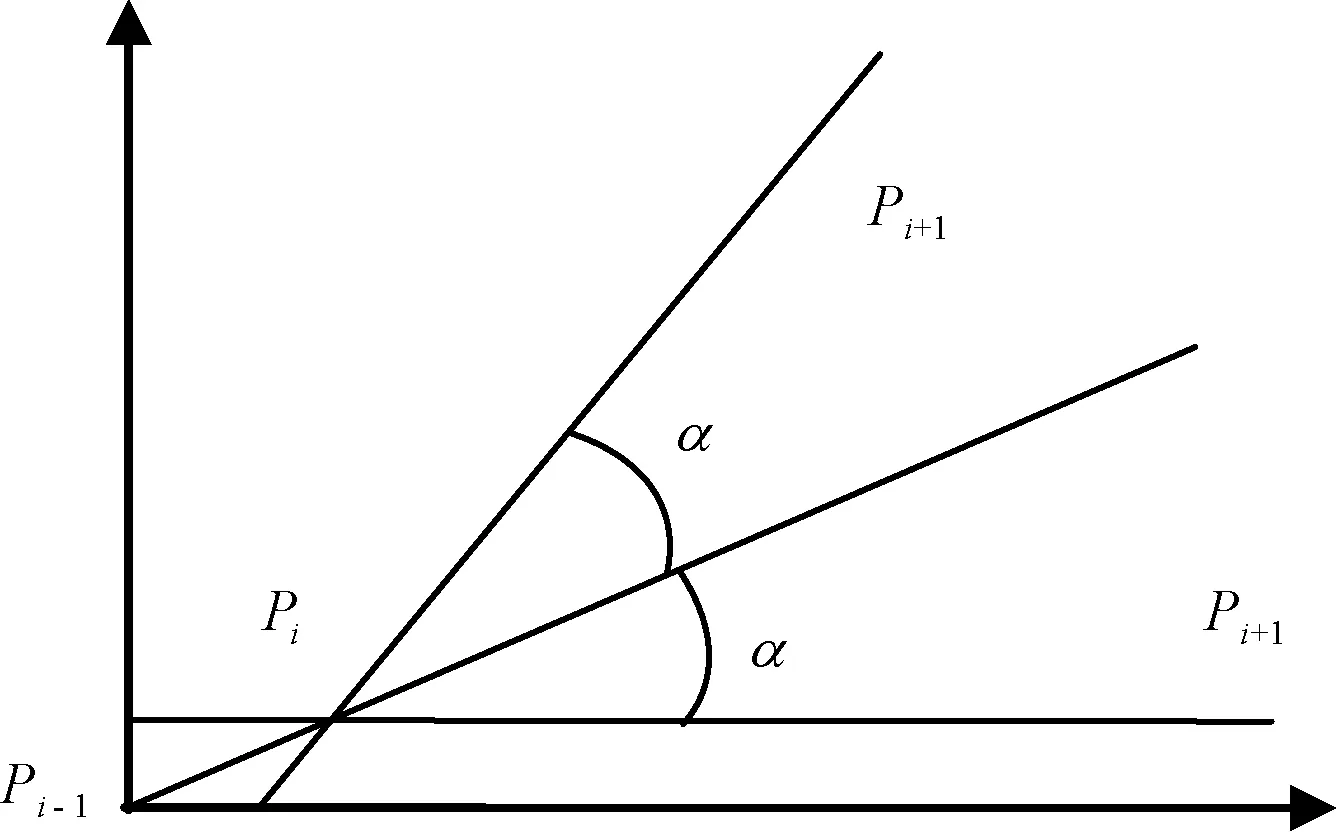
图1 航迹最大转弯角
(3) 最小转弯半径
在无人机的转弯飞行过程中,无人机需要通过在一定时间内调整方向从而实现转弯飞行。假设已知无人机第i段航迹的曲线方程为y=f(x),xi≤x≤xi+1,无人机的实际飞行要求的最小转弯半径为rmin,则根据曲线曲率计算公式:
(2)
可得第i段航迹各点处的转弯半径r=1/κ,故只要采用上述方法求得的航迹各点处的转弯半径均满足1/κ≥rmin,便可确定航迹能够满足该约束条件。
(4) 最大爬升/俯仰角
无人机在高度方向上的升降将会受到自身机动性能的约束。假设最大爬升/俯冲角为θmax,则第i段航迹的爬升/俯冲角可通过水平投影写成:
(3)
式中:ai+1=(xi+1-xi,yi+1-yi)。
(5) 航迹总长度
航迹总长度是指无人机从起始位置点到规定目标点需要飞过的最大空间距离。无人机最大能达到的航迹长度为Lmax,则该约束可写成:
L≤Lmax
(4)
1.2 航路的安全性
(1) 被摧毁的概率:无人机在对抗环境中被击中的概率。
(2) 撞地概率:无人机在执行任务过程中与地面撞击的概率。
(3) 禁飞区避开率:无人机在执行任务过程中避开遇到各种威胁的概率。
(4) 穿越威胁区时间:无人机在威胁区飞行的时间。
(5) 突防概率:无人机突破地方武力威胁攻击的概率。
1.3 航路的任务约束
(1) 航路总长度:任务要求无人机带装备和燃料,那么对无人机的飞行总长度会有要求。
(2) 目标进入方向:无人机在执行攻击任务过程中,从某个方向进攻会有更大的打击力。
(3) 禁飞区避开率:无人机在执行任务过程中避开遇到各种威胁的概率。
1.4 航路的任务完成
(1) 持续攻击力:无人机持续攻击的能力。
(2) 攻击范围:无人机对地方目标打击的范围。
(3) 防空武器攻击力:无人机对防空武器的打击能力。
(4) 命中精度:无人机击中地方目标的能力。
(5) 协同攻击力:无人机和其它无人机或者武器协同攻击的能力。
2 模糊综合评价航路评估
通过上一节的分析,航路优劣不能简单靠综合代价来判断,因为无人机还受到自身物理条件的约束,航路的代价小但是航路不一定是最优的,因为如果航路的转弯比较多,转弯角比较大,就会对航路的稳定性影响很大,并且不同航路离威胁区的远近也是不相同的。航路点数的不同也会在一定程度上影响到航路的优劣。因此航路规划是一个多因素决策问题。本文选择模糊综合法对无人机航路进行评估。
首先建立无人机的航路评价指标体系,如图2所示。

图2 航迹决策层次结构模型
针对无人机航迹评价指标的相对性和模糊性,采用模糊数学的理论和方法对无人机攻击航路进行评价。模糊数学可有效解决航迹评价中定性信息的处理。所谓综合评估,是指通过影响事物的多种因素进行总的评价,如果评价过程中采用模糊数学的方法,便是模糊综合评价法。多无人机协同定位航迹规划中影响航迹的因素众多。
模糊综合评价法的步骤如下:
(1) 确定评估对象和评估指标集
本文要评估的对象是无人机攻击航路的优劣, 一级指标包含航路的稳定性、安全性、任务约束、任务完成4个因素,建立因素集如下式:
U={U1,U2,U3,U4}
(5)
二级指标总共包含4个指标,航路的稳定性包括:最小转弯半径、最大转弯角、最大爬升角、转弯点的数量、航迹段的长度共5个因素;航路的安全性包括被摧毁的概率、撞地的概率、禁飞区的避开率和穿越威胁区的时间和突防概率共5个因素;航路的任务约束包括飞行的时间、目标进入方向、飞行的高度3个因素;任务的完成包括持续攻击的能力、 攻击范围、 防空火力攻击率、命中的精度和协同攻击能力5个因素。建立因素集如下:
U1={U11,U12,U13,U14,U15}
(6)
U2={U21,U22,U23,U24,U25}
(7)
U3={U31,U32,U33}
(8)
U4={U41,U42,U43,U44,U45}
(9)
(2) 建立评价集
根据评估标准和等级,综合考虑专家和工程师关于定性指标和定量指标的意见来确定评价集:
V={v1,v2,…,vm}
(10)
评价集V由不同的航路等级组成,其中m代表评价集中航路级别的个数。根据航路评价的指标,可以把航路优劣分为分为优、良、中、差和很差5级,集合中的元素可以是定性的,也可以是量化的分值。评价等级分得越详细,评价就相对越准确,但操作起来就会比较麻烦。每一种评价都可看成一种模糊向量,优、良、中、差和很差对应1,0.85,0.75,0.7,0.6,那么航路评价集表示为:
V= {v1,v2,…vm}=
{0.6,0.7,0.0.75,0.0.85,1}
(11)
(3) 层次分析法(AHP)确定指数权重
根据多准则决策(MCDM)问题的总体目标和特点,复杂的权重被分解,并构建为自下而上的层次结构,包括目标层、准则层和指标层。本文中,航路评估指标体系包含4个一级航路评估指标和18个二级航路评估指标。
建立评价指标体系后采用AHP方法确定指标权重,可以计算指标层指标的局部权重:
WL={ωL1,ωL2,…,ωLn}
(12)

(4) 建立模糊关系隶属度矩阵R
如果对讨论范围U的任意一个元素x,都有一个数B(x)∈(0,1)和它对应,则称B为U上的模糊集,B(x)为x对B的隶属度。当x在U中变动时,B(x) 就是1个函数,称为B的隶属函数。模糊等级的中间区域不仅要有稳定的隶属度,还要表现出细微的差别,因此要选取合适的隶属度函数。根据调查问卷的统计结果,采用基于频率法和加权平均法的某种数学方法,可以计算出一级模糊关系矩阵如下:
(13)
式中:rij为评价集V中第i个指标第j个等级的隶属度,i=1,2,…,n,j=1,2,…,m,n是指标的数量,m是评价集合中航路等级的个数。
模糊关系矩阵中的不同行反映了评估对象不同评价指标的每个等级的模糊集合的不同隶属度。采用基于频率的方法建立模糊关系矩阵,其原理是判断“优”“良”“中”“差”“很差”的专家和工程师的数量占评价改因素的所有人的比例,分别为该集合的评估指标的隶属集。
令rij=(fij1,fij2,…,fijm),其中fijm表示二级指标第ij个指标因子相对于评语集V={v1,v2,…,vm}中评语为vm的隶属度,则:
(14)
式中:Nijm为第ij个指标选择评语vm的人数;N为参加评估专家的总人数;m=1,2,…,m。
(5) 选择模糊算子, 计算各级模糊综合矩阵
B=W∘R作为模糊综合评估的基本模型,其中“°”称作合成算子,很大地影响着综合矩阵B,所以选择正确的合成算子对最终的评估结果起着至关重要的作用。
M(·,⊕)算子的计算公式为:
(15)
用局部权重WL合成一级模糊关系矩阵R,可以获得隶属矩阵,称为第一级模糊综合评价矩阵:
Bi=WL∘R=(bi1,bi2,…,bim)
(16)
由于评价指标体系的层次结构,需要计算二级模糊关系矩阵:
(17)
然后,结合权重矩阵,二级模糊综合评价矩阵可以计算如下:
B=W∘R′=(b1,b2,…,bm)
(18)
式中:bm为评价集中第m个等级的隶属度。
(6) 确定航路的优劣级别
根据隶属度最大原则,bi0=maxbi(1≤i≤m),可以判断评估对象属于i0个级别。
3 模糊综合评价法的仿真验证
为了验证模糊综合评价法评价无人机航迹的合理性,在一定型号的无人机执行某种特定任务的条件下,选取规划出来的航迹,以上一节的航路评估指标体系为评估指标集进行仿真实验验证。
(1) 构建权重判断矩阵并求出局部权重和全局权重
航路的准则层包括航路的稳定性、航路的安全性、航路的任务约束、任务完成4个因素,依次用U1,U2,U3,U4表示。
航路综合评价准则层的权重判断表如表1所示。

表1 航路综合评价第2层次的权重判断表
表1中一致性比例Rc=0<0.1。
航路的稳定性包括最小转弯半径、最大转弯角、最大爬升角、转弯点的数量、航迹段的长度5个因素,依次用U11,U12,U13,U14,U15表示。
航路稳定性指标权重判断表如表2所示。
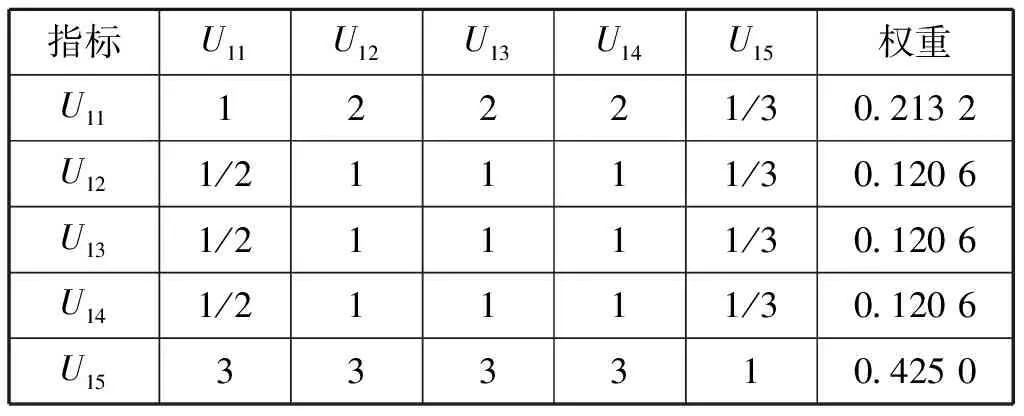
表2 航路稳定性权重判断表
表2中一致性比例Rc=0.013 1<0.1。
航路的安全性包括被摧毁的概率、撞地的概率、禁飞区的避开率和穿越威胁区的时间和突防概率5个因素,依次用U21,U22,U23,U24,U25表示。航路稳定性指标权重判断表如表3所示。

表3 航路安全性权重判断表
表3中一致性比例Rc=0.013 1<0.1。
航路的任务参数约束包括航路的总长度、目标进入方向、飞行高度3个因素,依次用U31,U32,U33表示,如表4所示。

表4 航路任务约束权重判断表
表4中一致性比例Rc=0<0.1。
航路的任务完成包括持续攻击能力、 攻击范围、 防空火力攻击率、命中的度和协同攻击能力5个因素,依次用U41,U42,U43,U44,U45表示,如表5所示。
利用AHP方法计算出了准则层的权重和指标层在各个相应准则的局部权重。各个指标的全局权重如表6所示。

表5 航路安全性权重判断表
表5中一致性比例Rc=0<0.1。

表6 航路指标全局权重
航路各个准则层在相应层中的指标权重如图3所示。

图3 航路各准则层指标权重图
通过上面的仿真图可以看出影响航路层的指标在各自所在准则层中的权重大小,可以得出它们的相对重要性,也是后面进行模糊综合评价的基础。

图4 航路各准则层指标权重图

图5 航路指标全局权重图
图4显示了准则层各航路评估指标的权重和各个航路指标在整个评估指标体系中的权重,可以看出各个准则层航路指标的相对重要关系,以及各个指标在整个评估过程中的重要性。
(2) 建立模糊关系隶属度矩阵
结合相关专家和工程师对某条航路各个指标的评价可以得到第一级模糊隶属度矩阵:
用同样方法可以计算出:
B2=(0.000 70.001 50.091 30.309 30.608 4)
B3=(0.000 00.005 70.002 90.674 30.317 1)
B4=(0.001 30.005 30.026 00.533 30.434 0)
这样可以得到二级模糊矩阵:

B=(0.001 30.005 50.046 40.473 60.475 8)
T1=B∘VT=0.917 7
航路的优劣的结果显示:b5=maxbi(i=1,2,…,5),航路的优劣等级为“优”。通过相同的步骤可以求出其它5条航路航迹的评分值分别为:T2=0.654 4,T3=0.782 9,T4=0.923 0,T5=0.934 4,T6=0.801 2。
同时,以百分数形式对准则层层面的航路指标评估结果进行评估,可以帮助无人机航路规划人员对航路进行有效分析,给出航路进行改进的意见,进而规划出性能更好的航路。假设此时的评价集V1=(10,30,50,70,90),准则层中每个指标的百分数值的计算如下:
(19)
经过计算可得:S1=77.572 5,S2=81.025 9,S3=76.057 1,S4=77.866 7。
通过对所选的6条航路进行评估,评估结果如图6所示。
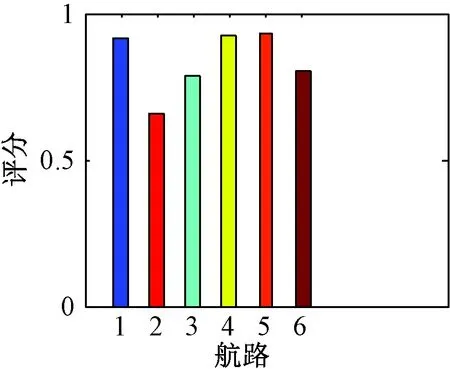
图6 航路评估结果
第1,4,5条航路的优劣等级为优,那么其余3条航路就可以不予考虑。根据具体的攻击任务分析,威力从1,4,5 3条航路中选择1条更有利于执行攻击任务的航路,可以对1,4,5 3条航路进行准则层层面的评分分析。比如说对航路1进行准则层层面分析,分析结果如图7所示。

图7 航路1准则层评估
航路的稳定性和任务完成质量评分比较高。航路稳定性和航路任务约束评分较低,那么继续优化航路时可以重点考虑对稳定性和任务约束的各个指标进行分析。针对具体的作战环境和具体的作战任务做出相应的改进措施,比如说可以对转弯点的数量、飞机飞行的高度等做出相应的分析,并实施相应的改进措施,使规划出来的航路更具可飞行性。通过模糊综合评价法的分析能够甄别出航路的优劣。通过对航路准则层层面的分析可以对航路做更具体的分析,能够对航路规划做出针对性的改进,节省了大量的资源与精力。
4 结束语
航路规划只选择了某些因素作为代价函数,然而航路评估是一个多准则决策问题,涉及到航路稳定性、航路安全性、航路任务约束和航路任务完成等因素。本文建立了完整、客观的航路评价指标体系,通过层次分析法获得个各指标的权重,然后利用模糊数学综合评价模型来对无人机航路的优劣进行综合评价。仿真实验证明了模糊综合评价法对航路的评价是有效的,并且能对航路优劣做详细的分析,对航路的优化提出了有效建议。
[1] 魏瑞轩,李学仁.无人机系统及作战使用[M].北京:国防工业出版社,2009.
[2] 沈文亮,张卓鸿.无人机在电子对抗中的应用研究[J].舰船电子对抗,2013,36(4):14-18.
[3] GILMORE J F.Automamous vehicle planning analysis methodology[C]∥The Proceedings of Association for Unmanned Vehicles Systems Conference.Washington,D.C.,1991:503-509.
[4] ZHAO H,GUO S.Risk evaluation on UHV power transmission construction project based on AHP and FCE method[J].Mathematical Problems in Engineering,2014(1):1-14.
[5] 吴万铎,吴万钶.模糊数学与计算机应用[M].北京:电子工业出版社,1988.
[6] 谢丽娟.模糊综合评判中合成算子的选取[J].科协论坛,2012(9):103-104.
[7] 朱振强.飞行器航路规划与评价研究[D].西安:西安电子科技大学,2014.