认知雷达搜索跟踪一体化工作模式设计
2018-05-04钱乔龙陈舒敏中国船舶重工集团公司第七二三研究所江苏扬州225101
钱乔龙,陈舒敏(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
在过去的100多年里,雷达技术作为一种有效的探测方式,取得了长足的进步。雷达的探测威力不断提高,测量精度也不断提升,整体性能也越来越强。在战争中,作为主要探测手段的雷达具有决定性的作用,因此研究先进的雷达技术是巩固国防安全所必需的[1-2]。
战场的电磁环境异常复杂,有敌我双方不同设备的电磁干扰,有地海杂波的不同背景环境,现代雷达要能够适应战场复杂的电磁环境,必须在不同的环境下都能够探测到目标[3]。传统雷达工作模式单一,不能根据作战环境不同而改变工作方式,不能有效满足现代作战要求。
要解决上述问题,就要改变雷达的工作体制。首先,雷达的信号处理功能要足够强大,只有这样,才能在不同作战环境下都有足够的资源完成处理任务。其次,雷达要使用相控阵体制,通过对不同发射组件的相位精确控制,产生不同的发射波形,根据环境、目标的不同,改变发射波形。最后,雷达在架构上必须要满足闭环条件,即根据后端信号处理的结果反馈控制前段发射波形,实现认知雷达处理的智能化。
Simon Haykin教授设计出一种新型雷达系统,人们称之为认知雷达系统[4-5]。认知雷达系统和传统雷达的区别在于增加了后端处理到前端发射的反馈控制。环境场景分析器分析处理接收回波,根据处理结果,选择最合适的工作模式和发射波形,反馈给环境场景激励器,调整系统的发射资源,控制前端发射,使雷达匹配工作环境,优化整体性能[6]。
图1给出了认知雷达系统结构,简要显示了其功能。
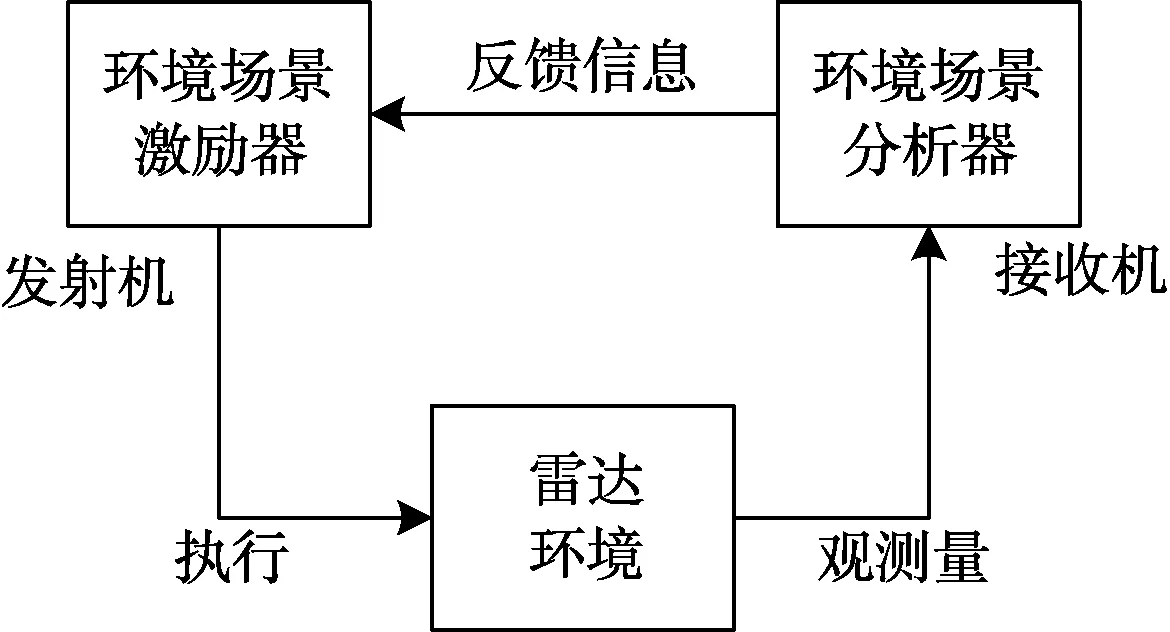
图1 认知雷达架构
1 认知雷达系统架构
作为现代雷达发展的一个热点,认知雷达可以依据当前相参处理间隔(CPI)的处理结果控制下一个CPI的发射波形,智能分配雷达系统的发射和处理资源。所以认知雷达系统的设计需要考虑智能化判断及复杂的信号处理任务。
认知雷达和传统雷达不同,其中加入了处理端对发射端的反馈控制,并且雷达工作方式复杂可变,处理运算量大。认知雷达的主要特点如下:
(1) 在认知雷达刚开机工作时,先对环境进行探测,分析周边工作环境的特点,智能选择适应环境的工作模式;
(2) 根据环境不同,认知雷达切换不同的工作模式,所以也必须根据工作模式的不同切换信号处理的处理任务,选择不同的处理模块。
根据以上认知雷达系统的特点可以看出,认知雷达要求智能化选择判断,要求各个工作模块之间的高速数据传输。要达到认知雷达的性能,在雷达系统的收发模块、处理模块、显控模块之间必须要进行大容量的高速数据交互。所以,使用基于总线数据交互的雷达架构是认知雷达系统设计的最优选择。
所设计的雷达系统架构如图2所示,有以下4个优点:
(1) 基于高速串行总线PCIE或SRIO的雷达系统,数据交换方式灵活,各个模块之间数据传输方便,提高了雷达系统数据交换的效率。
(2) 基于数据交换的雷达系统,预留标准的数据接口,扩展性好,可以方便地进行板卡升级、功能升级,从而提高认知雷达系统性能。
(3) 雷达系统采用统一的时钟源发给各个工作模块,保证了相控阵雷达系统的相参性。
(4) 采用数据流模式的工作方式,而不是使用传统的定时工作方式,可以实时地根据模式的变化做出切换,提高了模式切换的效率。
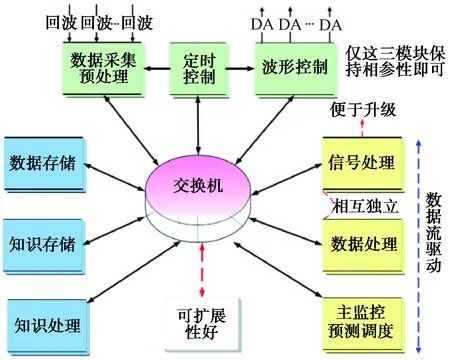
图2 基于总线交换的认知雷达系统
2 全向探测模式
认知雷达有2种工作模式,第1种工作模式是全向探测模式。在雷达开机工作后,首先工作在全向探测模式,发射一个宽波束,覆盖全空域。全空域接收回波后,处理模块处理回波,给出处理结果。显控系统显示周围环境,并分析环境特性,根据环境特性,自适应调整工作模式。
在当前工作模式下,发射的信号样式为脉冲信号,采用正交连续相位编码方式,在空域形成全向的方向图。图3显示了原始方向图。

图3 发射方向图(原始)
图4显示了认知雷达发射模块和接收模块示意图,从图中可以看出,通过多个发射天线,认知雷达发射正交信号,进行全向探测。接收模块通过多天线接收,进行匹配滤波处理[7]。

图4 认知雷达发射接收示意图
2.1 发射波形
全向探测模式下,认知雷达发射正交连续相位编码信号。设正交连续相位编码信号为S,式(1)为S的表达式:
S=exp(jΦ)=
{sl(n)=ejφl(n),n=1,2,…,N,l=1,2,…,L}
(1)
式中:N为码长;L为码元个数;Φ为S的相位矩阵;φl(n)∈Φ,为信号sl的第n个子脉冲的相位。

当φl(n)∈[0,2π]时,波形S就是正交连续相位编码信号。
使用Matlab进行仿真分析,设L为16,N为200,仿真出16路正交连续相位编码信号。连续相位编码信号时域图如图5所示。

图5 连续相位编码信号时域图
当前模式下,认知雷达的发射信号在全空域相互正交,式(3)为相关矩阵:
(2)
正交编码信号在全空域形成全向的方向图,可以实现对全空域的快速探测,而不需要进行相扫或机扫那样的扫描探测。但是因为功率分散到全空域,其探测威力比窄波束时下降。经过天线辐射,实际发射方向图如图6所示,覆盖阵面方位角-45°~45°。

图6 实际发射方向图
2.2 脉冲综合处理
全向探测模式下,同时形成16个接收波束,处理端同时处理16个波束,按照并行处理方式进行处理,获取目标及环境的特征参数。传统雷达一般进行脉冲压缩处理,每一个波束匹配滤波系数相同。但是因为认知雷达发射16路正交连续相位编码信号,每个天线发射的信号样式不同,所以匹配滤波系数也不相同。
处理端在同时对16路不同空间方向的回波进行脉冲压缩处理时,匹配滤波系数与回波的空间方位有关,所以称为脉冲综合处理,也可以称为空时匹配滤波。
16路波束的滤波器系数具体的获得方法是把每一路发射信号的导向矢量乘以发射信号矩阵,把乘法结果做共轭翻转即可。
图7显示了多波束情况下的脉冲综合处理流程,数字波束形成(DBF)板先完成接收波束合成,再进行空时匹配滤波处理,最后完成信号处理常规模块如动目标检测(MTD)、恒虚警率(CFAR)检测等处理。
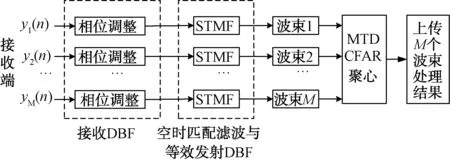
图7 空时匹配滤波处理示意图
设发射信号为X,发射导向矢量为at(θ),θ为目标角度,设xt为到达目标的信号,表示为:
xt=atT(θ)X
(3)
雷达接收信号为:
Y=βar(θ)xt+V
(4)
式中:β为该目标的复散射系数;V为干扰和噪声。
DBF板完成接收波束合成,wr为合成时的权,合成后的结果为:
(5)
合成之后,第1项参数包含xt即发射信号,对合成结果进行脉冲综合处理,可以得到每一路发射信号。
本文设计采用4片TMS320C6678完成脉冲综合处理,每片数字信号处理(DSP)有8个独立的处理核,其资源可以同时处理4个波束,同时进行脉冲综合、MTD、CFAR、聚心处理,处理流程如图8所示。
2.3 Matlab仿真及DSP实现
对脉冲综合处理流程进行Matlab仿真,发射信号为连续相位编码信号,码元个数设为200,目标个数设为4个,目标多普勒频移设为1/10重频,4/10重频,6/10重频,8/10重频,目标距离设为16 km,21 km,26 km,29 km。图9为回波信号的实部图和虚部图。图10为回波的脉冲综合结果图。

图9 回波实部和虚部

图10 单个脉冲的脉压结果仿真图
4片DSP处理16个波束,每片DSP处理4个波束,本文设计脉冲综合采用的方法是快速傅里叶变换-逆快速傅里叶变换(FFT-IFFT)。图11显示单个脉冲DSP处理结果、Matlab仿真结果、2种处理方式的误差,可以看出误差很小,量级在10-4,说明DSP处理结果正确。
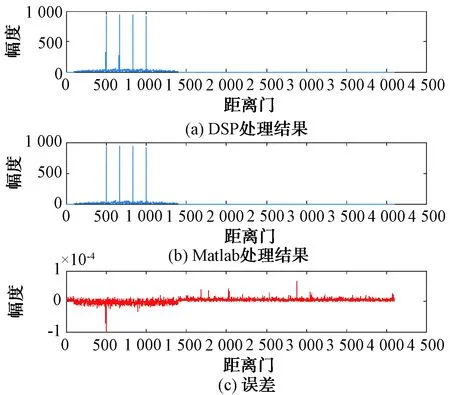
图11 脉冲综合处理结果
3 三波束搜索跟踪模式
认知雷达开机后,工作在全向探测模式,在对环境进行探测的同时,也探测到目标,当判断目标存在后,雷达转为搜索跟踪一体化工作模式。
三波束搜索跟踪模式常用波束资源有3个,根据全向探测模式的处理结果,依照一定的准则,选择2个重点目标,发射跟踪波束,进行跟踪。比较简单的基本准则是选择回波幅度最大的2个运动目标,或者由作战人员手动选择目标。根据目标强度分配跟踪波束的能量,基本准则是目标回波幅度越大,分配的波束能量越弱。
在跟踪的同时,发射1个波束进行搜索,采用相扫的方式进行常规搜索。这就实现了搜索跟踪一体化的作战任务。
3.1 发射波形
图12所示为搜索波束和跟踪波束这3个波束的能量相同,最右边为搜索波束,在-45°~45°之间相扫,当前指向-39°方向。左边2个为2个跟踪波束,中间指向0°,左边指向39°,跟踪重点目标。这种发射波束能量没有进行动态分配,一般用于刚开始跟踪目标时,还没有开始资源调整。

图12 波束能量相同
图13所示为搜索波束和跟踪波束这3个波束的能量不相同。最左边为搜索波束,能量最弱,当前指向-29°。右边2个为跟踪波束,中间指向9°方向,跟踪回波幅度较大的目标,右边波束指向24°,波束能量最强,跟踪幅度较小的目标。
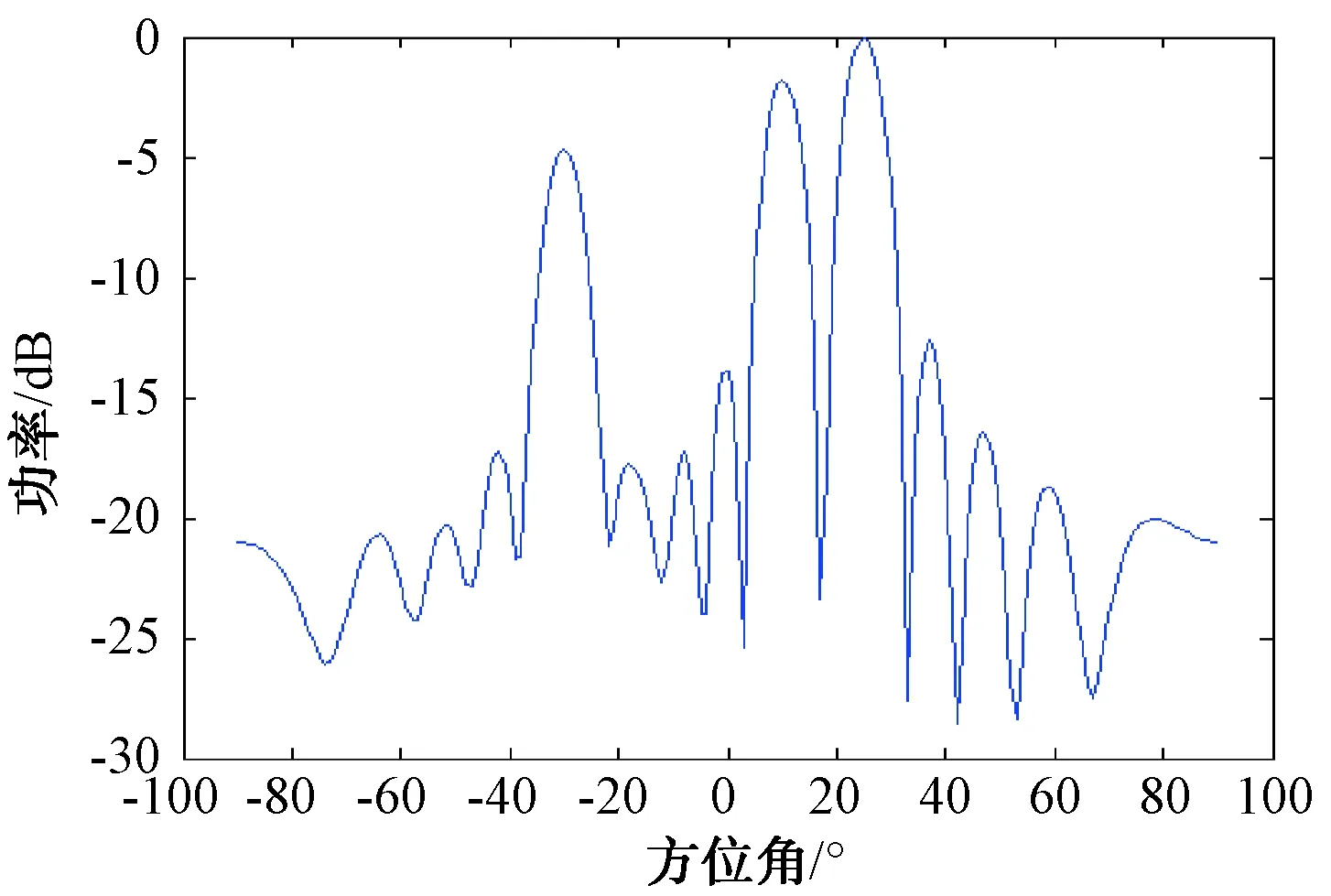
图13 波束能量不同
3.2 脉冲综合处理
搜索跟踪一体化工作模式下,接收处理方式如上文2.2中所介绍的脉冲综合处理算法。搜索波束方向接收合成1个波束,2个跟踪波束方向接收各合成和差波束,用于进行跟踪处理,所以在该模式下,发射3个波束,接收合成5个波束,处理流程如图14所示。

图14 信号处理流程图
该工作模式下,信号处理在DSP中的实现方式与全向探测模式类似。
4 结束语
本文介绍了认知雷达系统的架构,描述了认知雷达系统的特点,即根据当前的探测结果决定下一次的工作模式,改变发射波形。在三波束搜索跟踪模式下,实现了1搜索+2跟踪的三波束工作方式,达到了同时完成搜索跟踪的目的。
[1] 杨涛.MIMO雷达波形设计与实时处理系统研究[D].西安:西安电子科技大学,2014.
[2] 郭建明,谭怀英.雷达技术发展综述及第5代雷达初探[J].现达雷达,2012,34(2):1-5.
[3] 郦能敬,王被德,沈齐.对空情报雷达总体论证一理论与实践[M].北京:国防工业出版社,2008.
[4] HAYKIN S.Cognitive radar:away of the future[J]. IEEE Signal Processing Magazine,2006,23(1):30-40.
[5] 李岩.机载认知雷达工作参数优化方法研究[D].西安:电子科技大学,2014.
[6] 刘峥.MIMO认知雷达波形设计与实现[D].西安:电子科技大学,2013.
[7] 张雷,张兵,李广强,等.一种简单有效的火控雷达搜索时间模型[J].舰船电子对抗,2012,35(1):45-48.